
相機姿態估計(五)--DLS
論文:A Direct Least-Squares (DLS) Method for PnP
求解過程看著挺吃力的,看懂的還請多多指正。
本文針對PnP問題,採用非線性最小二乘直接計算,主要貢獻如下:
1.提出通用的n點(n≥3)姿態(all pose)計算方法,設計了獨特的非線性最小二乘代價函式。
2.無初始化要求,效能接近極大似然(MLE)方法的結果
3.非線性最小二乘代價函式不依賴點數變化。
具體過程如下:
1.問題建模

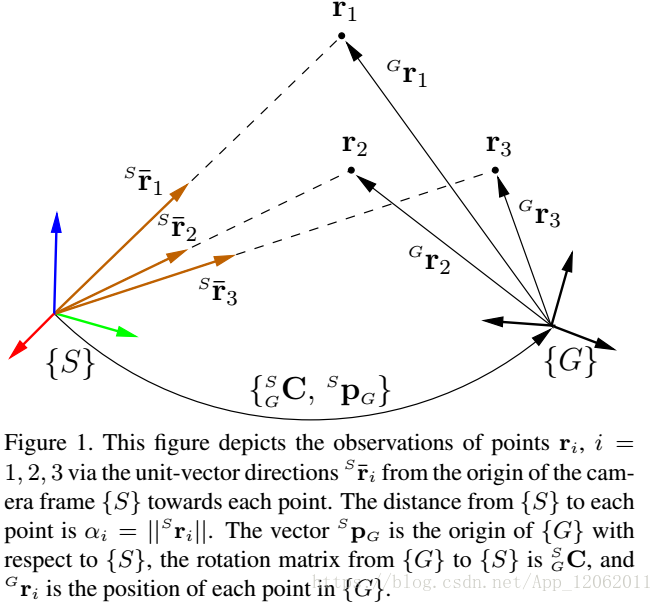
這裡的定義,跟其他如AP3P是一樣的,就是換了個字元,S是sensor的意思,就是相機座標系,G還是參考座標系。z是畫素座標系中測量點的方向向量,後面
整體的PnP非線性最小二乘求解建模如下:
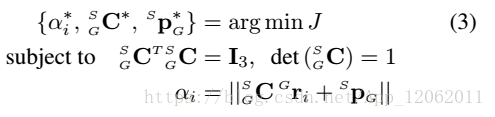
其中代價函式J是均方誤差和:

難點在於如何求解J的最小值,通常有給定一個引數的初始猜測值,然後不斷迭代如(如GN演算法),但這不能保證一定會獲得精確值,還有利用KKT條件(SVM中的支援向量的求解演算法中有用到)來求非線性系統,但是,這裡難點在於位置引數過多(6+n),而本文提出的方法如下:
1.修改LS模型:
先考慮無噪聲情況:

其中未知引數有α,C,P,我們重寫成矩陣運算形式:
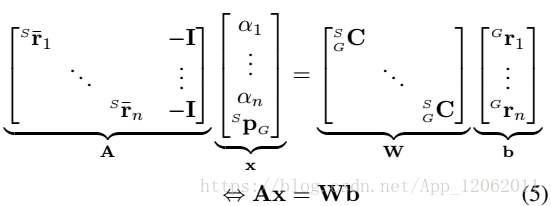
根據上面,計算P和α:

注意,P和α,都是旋轉矩陣C的線性函式:

因此,我們重寫式子4:

這樣,我們將未知引數,從6+n減少到了3。
接著,我們採用CGR 引數化旋轉矩陣C,使得3個CGR變數成為無約束優化變數。同時滿足:


CGR引數化C(s=[s1,s2,s3]^T):
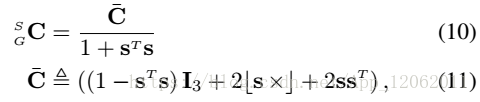
因此,9式可以表示 為:

由於C(s)導致線性化,因此,繼續簡化:

式13就是最終化簡後的約束條件。
2.修改代價函式
利用13式,我們重新定義代價函式J,來計算CGR的旋轉引數s,先增加噪聲:

基於15式,PnP問題,重構為下面無約束的LSM問題:

其中,新的
注意,這裡是一個4階多項式,包含如1,s1,s2,s3,...s1^4,s2^4,s3^4等項。
下面介紹作者直接計算多項式最小值的過程:
考慮到目標函式3個位置引數的4階多項式,因此,優化方程定義為:

為了構造Maculy矩陣,作者對目標函式增加了i=0項,F0= u0 + u1s1 + u2s2+ u3s3,這裡u是隨機生成的,這樣,原始目標函式被擴充套件為7個單項式組成:

然後 ,作者將引數S集合,劃分為4個集合,其中,S3集合包含所有可以被 s3^3整除的項,S2集合包含所有可以被s2^3整除但不能是s3^3,以此類推,S0集合包含所有未劃分的剩餘項。
之後,擴充套件多項式Fi為Gi:
假定原始系統的解為p,則所有擴充套件自F的多項式G,都為0,即F(p) = 0.但是,F0不會是0:
矩陣分解式21:

最終:

其中:

從式23可以看出,F0(p)是Mf0的一個特徵值,對應的特徵向量p^α。我們可以直接獲得式18的27個解。
因為S0是1,因此將特徵向量以第一個項歸一化,以此求解出S1,S2,S3。
實際上,這27組解,只有4個是真實區域性最優,大多數情況下,n≥6時,我們只能獲取一個真實解。之後,根據該解計算代價,如此實現直接計算最優化。
另外,DLS-LM是在上面求解時,採用LM迭代演算法,其他與DLS類似。
作者對比了NPL,SDP,EPnP,DLS,DLS-LM等演算法,點的分佈視角45°*45°,並模擬了高斯噪聲。效果如下:
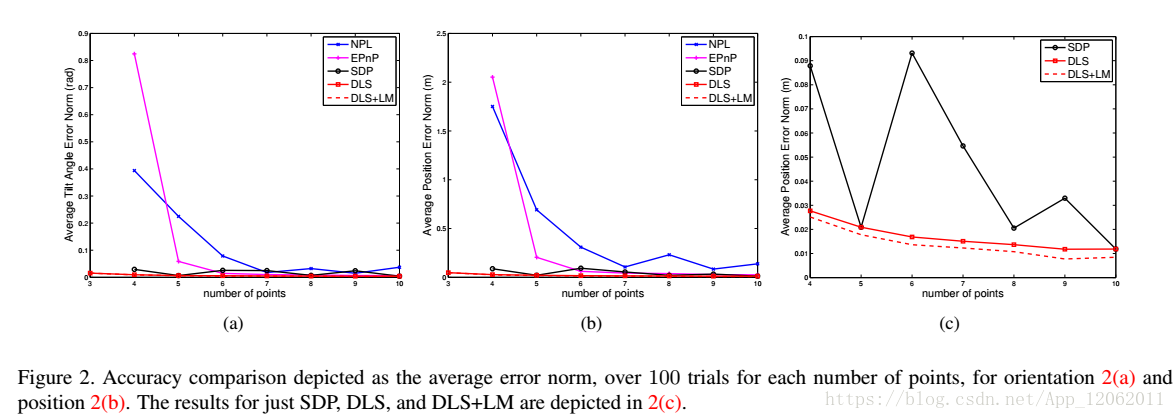
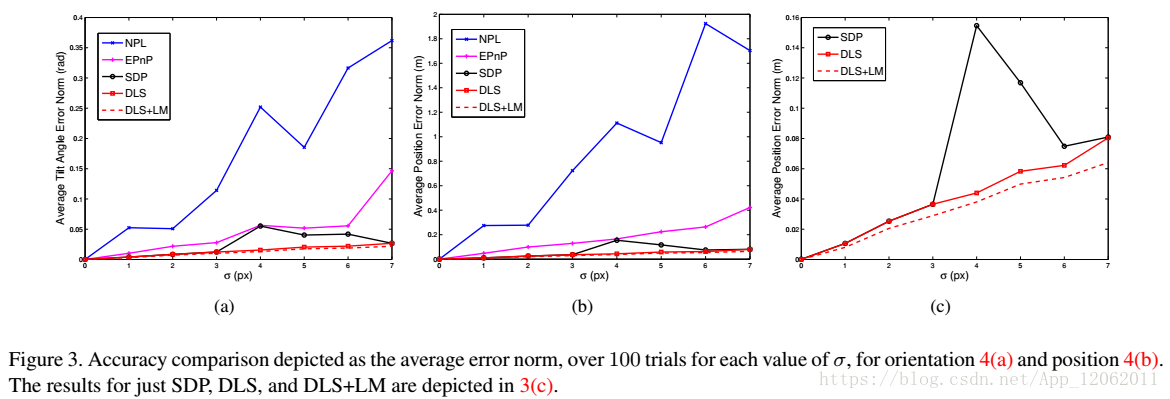
從這裡可以看出,NPL,SDP基本不用考慮了。當點數超過6時,DLS與EPnP的差距也不明顯了,剩下的可以對比下時間。