
Efficient Online Segmentation for Sparse 3D Laser Scans-- 線上的稀疏點雲分割
在基於鐳射的自動駕駛或者移動機器人的應用中,在移動場景中提取單個物件的能力是十分重要的。因為這樣的系統需要在動態的感知環境中感知到周圍發生變化或者移動的物件,在感知系統中,將影象或者點雲資料預處理成單個物體是進行進一步分析的第一個步驟。
在這篇文章中就提出了一種十分高效的分割方法。首先是將掃描到的點雲移除平面處理,然後移除平面後一定範圍內的點雲資料分割成不同的物件。該論文的是集中解決了在很小的計算量的條件下,能夠在大多數系統上做到高效的分割。避免了直接對3D點雲的計算,並直接在2.5D 的深度影象上進行操作。此方案能夠很好的解決處理稀疏的3D點雲資料。作者使用了新型Velodyne VLP-16掃描器,並且程式碼是在C++和ROS中實現了這種方法,並且程式碼是開源的,這種方法可以做到使用單核CPU以及高於感測器的幀執行速率執行,能夠產生高質量的分割結果。

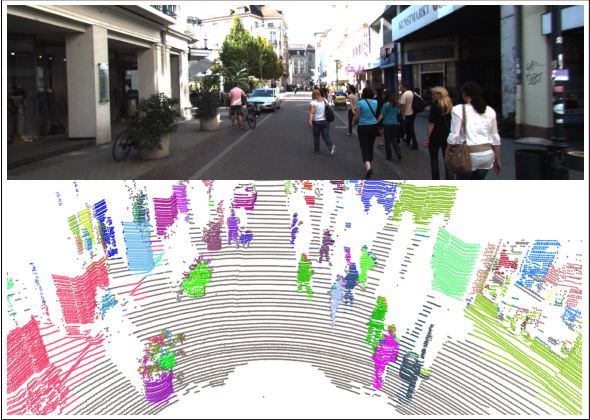
左圖:使用Velodyne VLP-16掃描器得到的稀疏3D點雲資料分割後生成的物件(如人,車和樹)。 不同的顏色對應不同的分割結果。 右:用於實驗的Clearpath Husky機器人。
在3D鐳射點雲資料中分離單個物件是移動機器人或自動駕駛車輛自主導航的重要任務。 在未知環境中航行的自動駕駛車輛面臨著對其周圍環境進行推理的複雜任務。,在擁有汽車和行人的繁忙街道上,地圖可能受到環境動態性質導致的錯誤資料關聯的影響。 在掃描配準和對映過程中,能夠更好地推理此類物件並忽略可能的動態物件的關鍵步驟是將3D點雲資料分割為不同的物件,以便可以單獨跟蹤它們
所以本論文很重要的貢獻是將實現快讀高效且穩健的3D
地面去除
在進行分割之前,需要從掃描的點雲資料中移除地面。這種地面移除的方法,只是把低於車輛高度的3D點移除。這種方法在簡單的場景中起作用,但是如果在車輛的俯仰或者側傾角不等於零或者地面不是完美的平面。則會失敗。但是可以使用RANSAC
鐳射雷達的會提供每個鐳射束的距離值,時間戳以及光束的方向作為原始資料。這使得我們可以直接將資料轉換為深度影象。影象中的行數由垂直方向上的光束的數量定義,比如對於Velodyne掃描器,有16線,32線以及64線,而影象的列數有鐳射每360度旋轉得到的距離值。這種虛像的每個畫素儲存了感測器到物體之間的距離,為了加速計算甚至可以考慮在需要時將水平方向上的多個讀數組合成一個畫素。
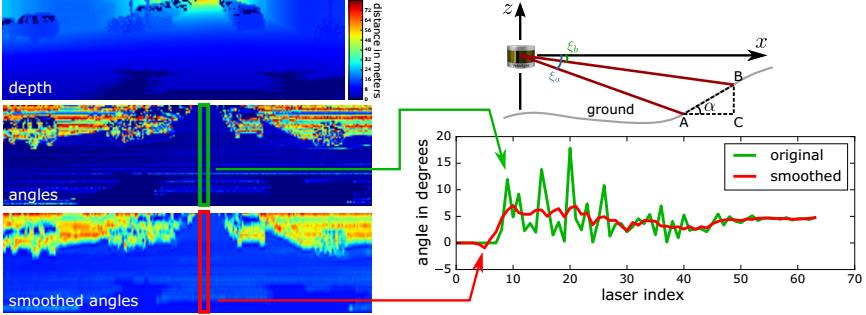
左上角:深度影象的一部分。 左中:通過顯示α角度生成的影象。 左下:應用Savitsky-Golay平滑後的角度。
右上角:α角的圖示。 右下圖:左圖中標記的α角度列的平滑圖示。
使用上述生成的和成影象來處理而不是直接處理計算3D點雲,可以有效的加速處理速度,對於其他的不提供距離值的掃描器也可以將3D點雲投影到圓柱影象上,計算每個畫素的歐幾里得距離,仍然可以使用該論文提出的方法。
為了識別地面,這裡面有三個假設:
1, 假設感測器是大致安裝在水平移動基座上。
2, 假設地面的曲率很低。
3, 移動機器人或者車輛至少在深度影象上最低行的畫素觀測地平面
在假設成立的條件下,首先將深度影象的每一列(c)畫素的距離值(R)轉化為角度值  這些角度表示了連線兩點的傾斜角度。
這些角度表示了連線兩點的傾斜角度。 和
和 分別代表在該行相鄰的深度值。知道連續垂直的兩個單個鐳射束深度值,可以使用三角規則計算角度α,如下所示:
分別代表在該行相鄰的深度值。知道連續垂直的兩個單個鐳射束深度值,可以使用三角規則計算角度α,如下所示:
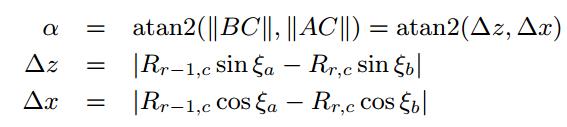
其中ξa和ξb是對應於行r-1和r的鐳射束的垂直角,由於每個α計算需要兩個深度值,所以生成的角度圖大小比深度圖範圍的行數小1.這裡假設吧這些所有的角度表示為 ,表示為在r行和c列(行和列)座標上的角度值。
,表示為在r行和c列(行和列)座標上的角度值。
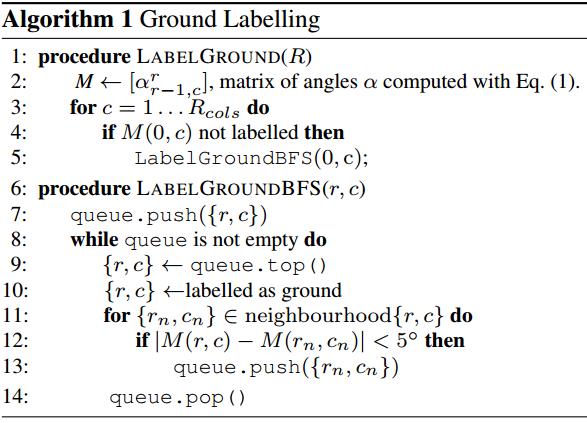
地面識別演算法。
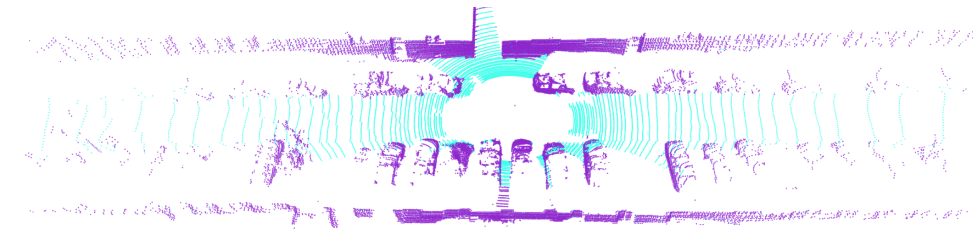
根據上述演算法得出的地面,地面標記為淺藍色。
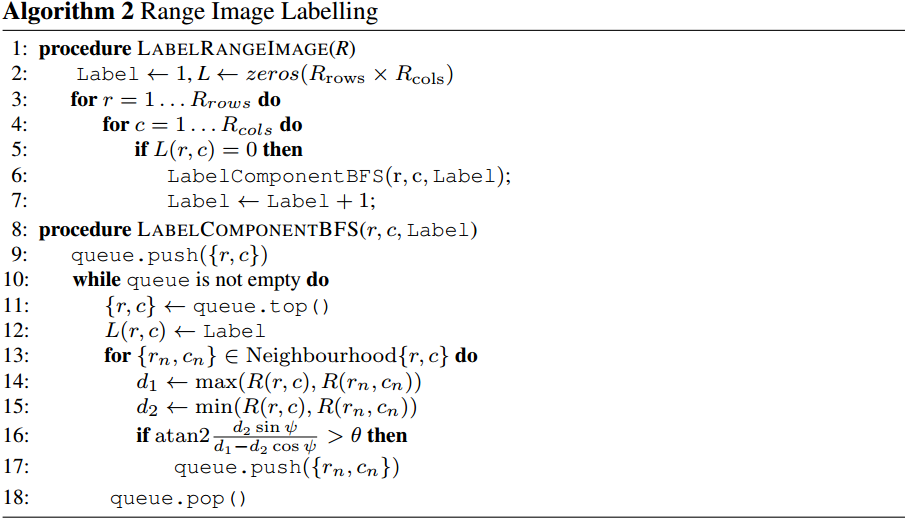
但是由於鐳射雷達也是有誤差點的,所以這裡也是需要處理一些在深度範圍內的離群點,具體可檢視論文。為了達到角度平滑的效果使用了Savitsky-Golay濾波演算法對每一個列進行處理。在得到濾波後的角度圖後,在這個基礎上開始執行地面識別,使用了廣度優先搜尋將相似的點標記在一起,廣度優先搜尋(Breadth-first search BFS) 是一種流行的圖搜尋遍歷演算法,他從圖給定的點開始遍歷,並在移動到下一級令居之前首先開始探索直接相鄰的節點,在該論文中使用了網格上的N4領域值計算角度差值,以確定矩陣M的兩個相鄰元素是否滿足角度上的約束條件Δa,設定為5°。
使用鐳射深度影象進行快速有效的分割
感測器的垂直解析度對分割問題的難度是有著十分重要的影響的,我們需要判斷對於相鄰點,去判斷該鐳射束是否是被同一物體反射。為了解決鐳射是否是同一個物體反射的問題,這裡是基於角度測量的方法。這種方法的好處是文中反覆提及多次這種方法的優點 :首先,我們可以直接在深度影象中利用明確定義的鄰域關係,這使得分割問題更容易。 其次,我們避免生成3D點雲,這使得整體方法的計算速度更快。
在下圖中展示了分割的效果
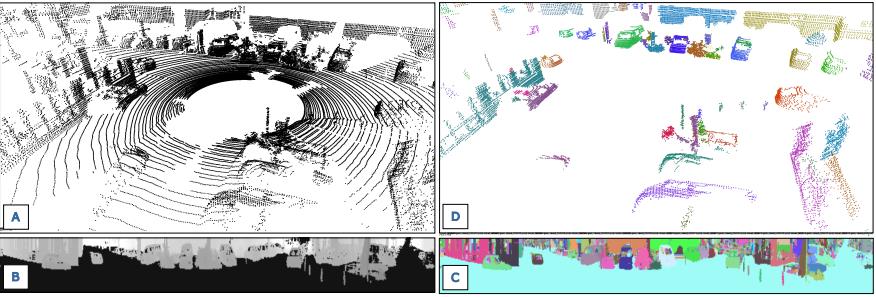
這是使用該分割方案的結果,(A)圖是來自Velodynede 點雲,(B)根據感測器的原始值建立的深度影象,並且已經將地面點去除了。(C)圖是在生成的深度圖的基礎上執行的分割結果。(D)將分割後的深度圖還原為點雲,並以不同的顏色顯示。
這裡詳細的解釋一下關於如果使用角度約束的方法實現分割的:
如下圖所示的一個示例場景,其中兩個人在騎自行車者前面彼此靠近地行走,騎自行車者在他們和停放的汽車之間經過。 這裡使用的Velodyne VLP-16掃描器記錄了這個場景。 中間的影象展示出了從位於O處的掃描器測量的兩個任意點A和B的結果,表示出了鐳射束OA和OB。 在不失一般性的情況下,我們假設A和B的座標位於以O為中心的座標系中,y軸沿著兩個鐳射束中較長的那一個。 我們將角度β定義為鐳射束與連線A和B的線之間的角度,該角度一般是遠離掃描器。 在實踐中,角度β證明是有價值的資訊,可以用來確定點A和B是否位於同一物體上。
那麼基於鐳射的測量值我們是知道第一次測量的距離值OA以及對應的第二次測量值OB,分別將這兩次的測量結果標記為d1和d2,那麼利用以上資訊既可以用下列公式測量角度:

下列圖中的右圖示出了從場景的俯檢視中在xy平面中的計算。 注意,我們可以計算在範圍影象中在行或列方向上相鄰的點A和B對的角度β。 在第一種情況下,角度對應於行方向上的角度增量,而另一種情況下對應於列方向上的增量。
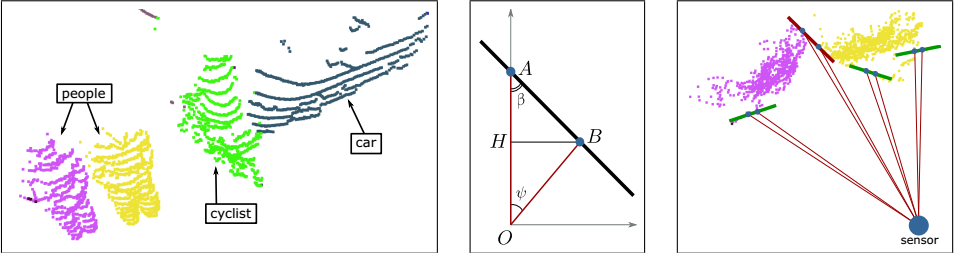
左:示例場景有兩個行人,一個騎自行車者和一輛汽車。 中間:假設感測器在O點並且線OA和OB表示兩個鐳射束,則點A和B產生一條線,該線估計物件的表面,如果它們都屬於同一物件。 我們基於角度β做出是否為同一物體的判斷。 如果β>θ,其中θ是預定閾值,認為這些點代表一個物件。 右圖:示例場景中行人的俯檢視。 綠線表示β>θ的點,而紅線表示低於閾值的角度,因此將物件標記為不同。
基於閾值的β的分割方法在實驗評估中進行實驗,實際情況可以是被掃描物體是平面的情況,例如牆壁,並且幾乎平行於鐳射束方向。在這種情況下,角度β將很小,因此物體可能被分成多個區段。這基本上意味著如果β小於θ,則難以確定兩個點是否源自兩個不同的物體,或者僅僅位於幾乎平行於波束方向的平面物體上。然而,儘管有這個缺點,我們的實驗表明該方法在實踐中仍然有用。上述行為很少發生,如果是這樣,它通常將會導致特別傾斜的平面物體的過度分割。
以上就是關於去地面後使用的分割演算法。可以看得出最重要的一個公式就是β角度值的求解
實驗部分
該演算法
(i)所有計算都可以快速執行,即使在大約70 Hz的移動CPU的單核上執行,
(ii)可以 將移動機器人獲得3D原始資料生成深度資料並分段為有意義的個體
(iii)該方法在稀疏資料上表現良好,例如從16光束Velodyne Puck掃描器獲得的稀疏資料。 在實驗中中,使用點雲庫PCL中來實現的歐幾里德聚類。 在所有實驗中,我們使用預設引數θ= 10°。
程式碼開源(https://github.com/PRBonn/depth_clustering),且小編親自測試,並附上測試視訊,有興趣者關注微信公眾號,
並可以推薦有價值的您覺得比較好的與點雲相關的程式碼或者論文,傳送到群主郵箱(dianyunpcl163.com),如此可以一起交流討論!!
有興趣的小夥伴可以關注微信公眾號,加入QQ或者微信群,和大家一起交流分享吧(該群主要是與點雲三維視覺相關的交流分享群,歡迎大家加入並分享)
