
ACM----幾何---凸包
阿新 • • 發佈:2018-11-14
推薦:
http://www.cnblogs.com/Booble/archive/2011/02/28/1967179.html
凸包(Convex Hull)是一個計算幾何(圖形學)中的概念。
在一個實數向量空間V中,對於給定集合X,所有包含X的凸集的交集S被稱為X的凸包。
X的凸包可以用X內所有點(X1,...Xn)的線性組合來構造.
在二維歐幾里得空間中,凸包可想象為一條剛好包著所有點的橡皮圈。
用不嚴謹的話來講,給定二維平面上的點集,凸包就是將最外層的點連線起來構成的凸多邊型,它能包含點集中所有的點。
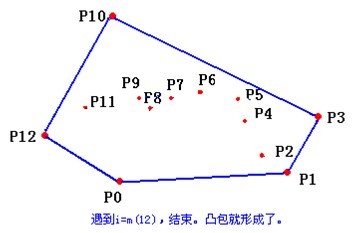
例子:假設平面上有p0~p12共13個點,過某些點作一個多邊形,使這個多邊形能把所有點都“包”起來。當這個多邊形是凸多邊形的時候,我們就叫它“凸包”。如下圖:

二.解法:
Graham掃描法
時間複雜度:O(n㏒n)
思路:Graham掃描的思想是先找到凸包上的一個點,然後從那個點開始按逆時針方向逐個找凸包上的點,實際上就是進行極角排序,然後對其查詢使用。 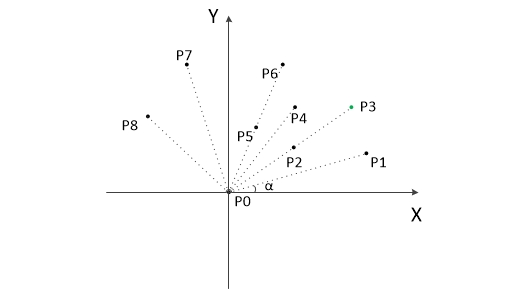
步驟:
- 把所有點放在二維座標系中,則縱座標最小的點一定是凸包上的點,如圖中的P0。
- 把所有點的座標平移一下,使 P0 作為原點,如上圖。
- 計算各個點相對於 P0 的幅角 α ,按從小到大的順序對各個點排序。當 α 相同時,距離 P0 比較近的排在前面。例如上圖得到的結果為 P1,P2,P3,P4,P5,P6,P7,P8。我們由幾何知識可以知道,結果中第一個點 P1 和最後一個點 P8 一定是凸包上的點。
(以上是準備步驟,以下開始求凸包)
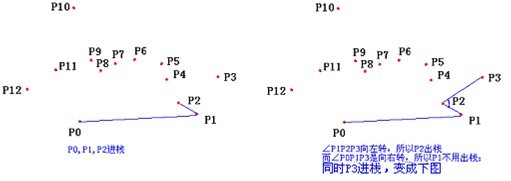
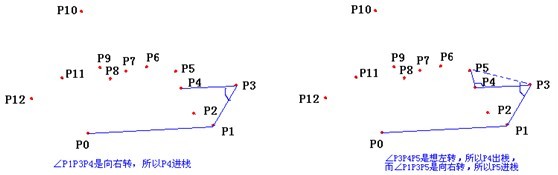
以上,我們已經知道了凸包上的第一個點 P0 和第二個點 P1,我們把它們放在棧裡面。現在從步驟3求得的那個結果裡,把 P1 後面的那個點拿出來做當前點,即 P2 。接下來開始找第三個點: - 連線P0和棧頂的那個點,得到直線 L 。看當前點是在直線 L 的右邊還是左邊。如果在直線的右邊就執行步驟5;如果在直線上,或者在直線的左邊就執行步驟6。
- 如果在右邊,則棧頂的那個元素不是凸包上的點,把棧頂元素出棧。執行步驟4。
- 當前點是凸包上的點,把它壓入棧,執行步驟7。
- 檢查當前的點 P2 是不是步驟3那個結果的最後一個元素。是最後一個元素的話就結束。如果不是的話就把 P2 後面那個點做當前點,返回步驟4。
最後,棧中的元素就是凸包上的點了。
以下為用Graham掃描法動態求解的過程:
下面靜態求解過程



三.模板
#include<iostream>
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<cmath>
#define PI 3.1415926535
using namespace std;
struct node
{
int x,y;
};
node vex[1000];//存入的所有的點
node stackk[1000];//凸包中所有的點
int xx,yy;
bool cmp1(node a,node b)//排序找第一個點
{
if(a.y==b.y)
return a.x<b.x;
else
return a.y<b.y;
}
int cross(node a,node b,node c)//計算叉積
{
return (b.x-a.x)*(c.y-a.y)-(c.x-a.x)*(b.y-a.y);
}
double dis(node a,node b)//計算距離
{
return sqrt((a.x-b.x)*(a.x-b.x)*1.0+(a.y-b.y)*(a.y-b.y));
}
bool cmp2(node a,node b)//極角排序另一種方法,速度快
{
if(atan2(a.y-yy,a.x-xx)!=atan2(b.y-yy,b.x-xx))
return (atan2(a.y-yy,a.x-xx))<(atan2(b.y-yy,b.x-xx));
return a.x<b.x;
}
bool cmp(node a,node b)//極角排序
{
int m=cross(vex[0],a,b);
if(m>0)
return 1;
else if(m==0&&dis(vex[0],a)-dis(vex[0],b)<=0)
return 1;
else return 0;
/*if(m==0)
return dis(vex[0],a)-dis(vex[0],b)<=0?true:false;
else
return m>0?true:false;*/
}
int main()
{
int t,L;
while(~scanf("%d",&t),t)
{
int i;
for(i=0; i<t; i++)
{
scanf("%d%d",&vex[i].x,&vex[i].y);
}
if(t==1)
printf("%.2f\n",0.00);
else if(t==2)
printf("%.2f\n",dis(vex[0],vex[1]));
else
{
memset(stackk,0,sizeof(stackk));
sort(vex,vex+t,cmp1);
stackk[0]=vex[0];
xx=stackk[0].x;
yy=stackk[0].y;
sort(vex+1,vex+t,cmp2);//cmp2是更快的,cmp更容易理解
stackk[1]=vex[1];//將凸包中的第兩個點存入凸包的結構體中
int top=1;//最後凸包中擁有點的個數
for(i=2; i<t; i++)
{
while(i>=1&&cross(stackk[top-1],stackk[top],vex[i])<0) //對使用極角排序的i>=1有時可以不用,但加上總是好的
top--;
stackk[++top]=vex[i]; //控制<0或<=0可以控制重點,共線的,具體視題目而定。
}
double s=0;
//for(i=1; i<=top; i++)//輸出凸包上的點
//cout<<stackk[i].x<<" "<<stackk[i].y<<endl;
for(i=1; i<=top; i++) //計算凸包的周長
s+=dis(stackk[i-1],stackk[i]);
s+=dis(stackk[top],vex[0]);//最後一個點和第一個點之間的距離
/*s+=2*PI*L;
int ans=s+0.5;//四捨五入
printf("%d\n",ans);*/
printf("%.2lf\n",s);
}
}
}轉自: