
【樹莓派+ NET MF打造視訊監控智慧車】控制篇 樹莓派
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow
也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
對已經具備一定Linux基礎的人來說,樹莓派學習起來應該非常簡單自然。在他們眼中,樹莓派就是一個簡易版的,卡通版的Linux而已。但是對我這樣一個早已習慣微軟技術生態系統的人或者初學者來說,要實現一個簡單程式的編寫、編譯到執行,還是不太容易的。
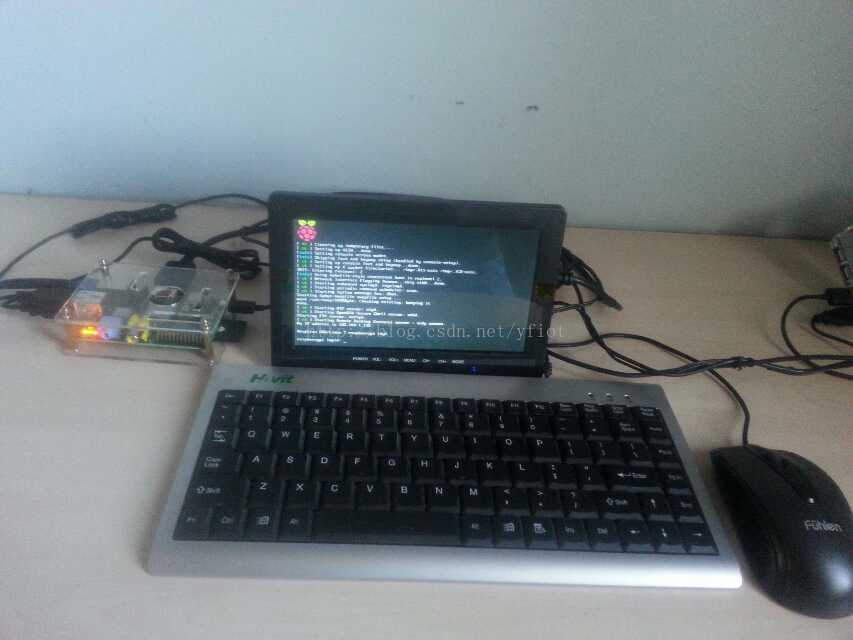
上圖是我搭建的一個相對完整的樹莓派開發環境,有顯示(HDMI轉VGA->7寸顯示屏800*480),有鍵盤和滑鼠等,當然這些不是必須的,只是對初學者來說,顯的比較直觀。
為了降低學習和開發難度,樹莓派上提供多種程式語言選擇,比如Python、Java、C/C++等linux可支援的開發語言。在圖形介面下,可以在IDE環境相對簡單的進行
出於對C/C++語言的熱愛,我還是選擇了基於GNU C進行程式開發,下圖是已經安裝到智慧小車上的樹莓派。我們需要搭建一個沒有顯示、滑鼠和鍵盤下的程式設計、部署、執行除錯環境。

至於如何燒寫樹莓派的系統到SD卡上,我們這裡就不再熬敘了,已有很多入門文章進行了相關的講解和說明。本篇文章主要介紹,搭建一個便於和Windows平臺互動的程式設計平臺,藉助wiringPi C/C++庫,操作GPIO和串列埠通訊。
我們選擇安裝的樹莓派系統映象為Raspbian
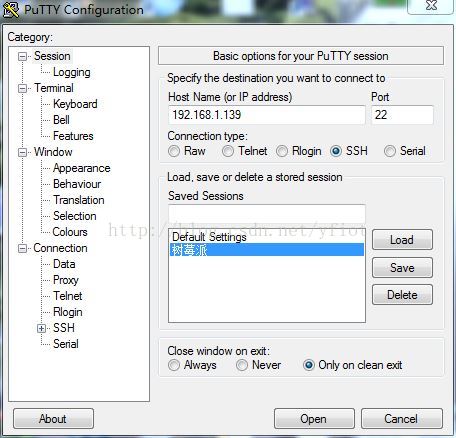
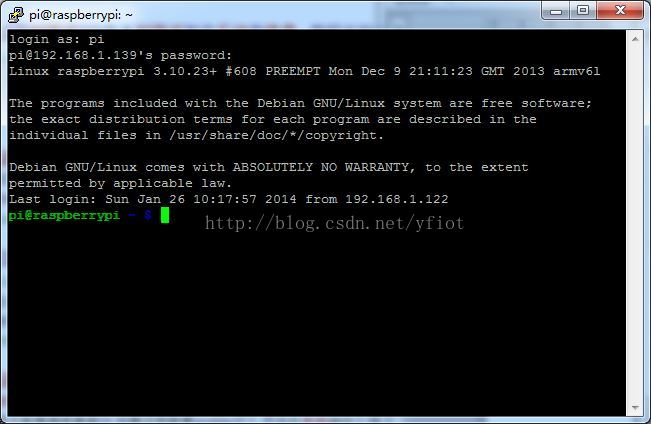
開啟連線,輸入使用者名稱:pi 密碼:raspberry(預設) 會出現如下畫面。
第二步:安裝簡易FTP服務
為了便於把Windows系統中已經寫好的C檔案部署到樹莓派中,我們安裝一個簡單的FTP服務。我們選擇的是一個開源的比較輕量級的FTP伺服器vsftpd,下面簡單說一下安裝步驟:
1、 安裝vsftpd服務
sudo apt-get install vsftpd
2、 開啟vsftpd服務
sudo service vsftpd start
3、 修改配置檔案
sudo nano /etc/vsftpd.conf
找到並修改
anonymous_enable=NO //不允許匿名訪問
local_enable=YES //允許本地使用者訪問
write_enable=YES //允許寫
local_umask=022 //設定上傳後文件許可權掩碼
存檔退出。
4、 重啟vsftpd服務
sudo service vsftpd restart
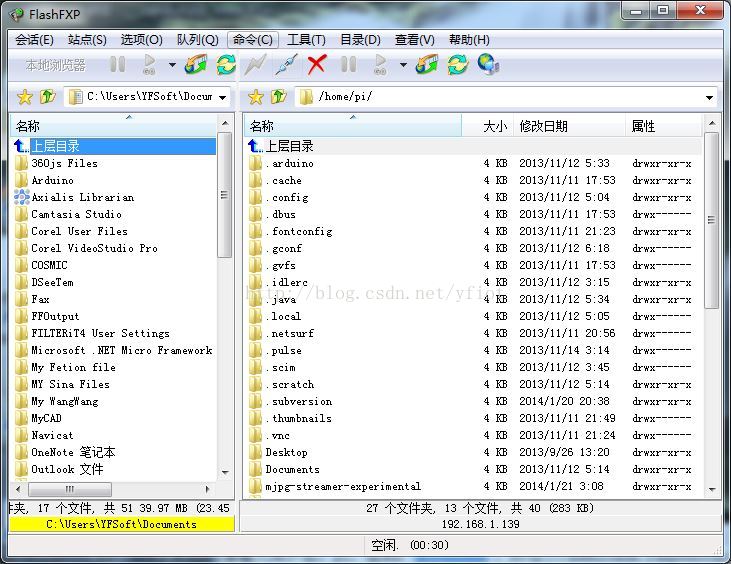
開啟windows上任意一款FTP客戶端軟體(我一直使用的是FlashFXP),配置相關IP、使用者和密碼(使用者名稱:pi 密碼:raspberry)。

連線成功後,會出現如下畫面:
第三步:安裝wiringPi庫
WiringPi是第三方封裝的一個針對樹莓派平臺的GPIO控制庫函式,WiringPi遵守GUN Lv3。wiringPi使用C或者C++開發並且可以被其他語言轉包應用。
詳情請參見這篇文章:http://blog.csdn.net/xukai871105/article/details/17737005
有了以上三步的準備,我們就可以在Windows編寫開發C語言程式碼,遠端部署到樹莓派,通過樹莓派上的GCC工具進行編譯,然後執行。編寫程式碼之前,我們先了解一下樹莓派的GPIO介面,如下圖所示:
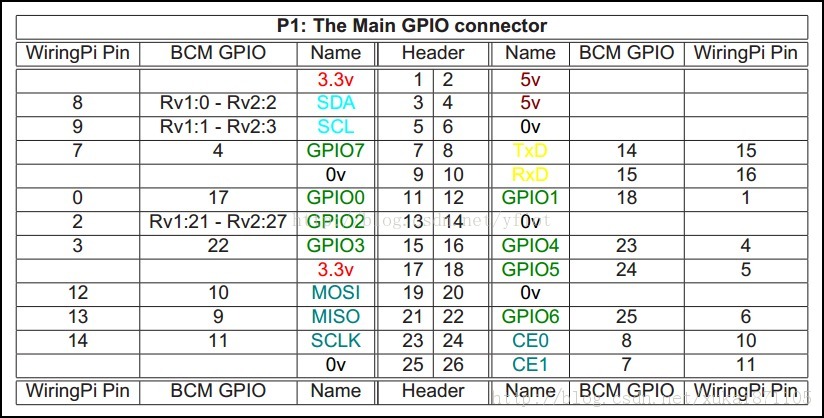
我們需要完成三個功能,一、GPIO控制一個LED閃爍;二、通過串列埠和凌霄板進行通訊;三、輸出PWM訊號控制舵機。
下面我們將一一介紹上面三個功能的實現。
1、GPIO控制LED燈閃爍
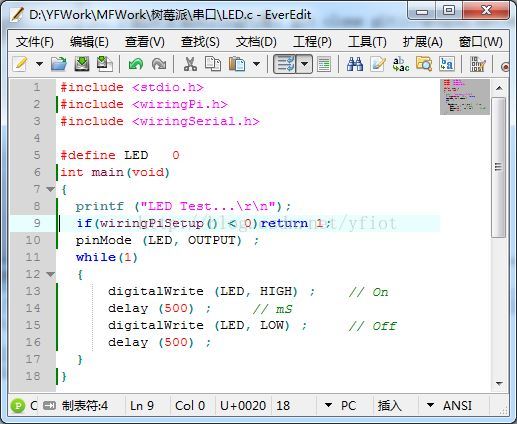
硬體接線:我們選擇一個LED發光二極體,焊接一個1K左右的電阻,把一根杜邦線剪開,分別焊接到二極體兩個管腳上(其中一個焊接在電阻另外一端)。LED較長的管腳為正極,我們接在樹莓派第11管腳上,也就是GPIO0上。另外一端,我們接在25管腳上(可任意接在一個標有0V的管腳上)。
我們在記事本(推薦使用EverEdit)編寫相關程式碼,如下圖所示:
把LED.C檔案通過FlashFXP上傳到樹莓派上去。用GCC進行編譯,然後執行,如下圖所示:

如果硬體沒有問題,那麼你應該可以看到LED燈在閃爍了。
2、樹莓派和凌霄開發板串列埠通訊
2.1 關閉串列埠除錯功能
串列埠還不能直接使用,因為預設是繫結除錯埠的,所以我們必須先關閉該功能。
命令列中輸入如下命令:
sudo nano /boot/cmdline.txt
將以下內容
dwc_otg.lpm_enable=0 console=ttyAMA0,115200 kgdboc=ttyAMA0,115200console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait
改為
dwc_otg.lpm_enable=0 console=tty1 root=/dev/mmcblk0p2rootfstype=ext4 elevator=deadline rootwait
輸入如下命令:
sudo nano /etc/inittab
將以下內容
#Spawn a getty on Raspberry Pi serial line
T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100
改為
#Spawn a getty on Raspberry Pi serial line
#T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100
然後重啟樹莓派。
2.2 硬體接線
8號管腳為TX,10號管腳為RX,是TTL電平的,我們和凌霄開發板的子板介面19和20管腳進行連線。
樹莓派 8 (TX) -- 凌霄開發板19(RX)
樹莓派 10 (RX) -- 凌霄開發板20(TX)
樹莓派 6 (0v) -- 凌霄開發板03(GND)
2.3 .NET Micro Framework串列埠程式設計
我們要求的功能相對簡單,並不要求雙向通訊,凌霄開發板接收到控制攝像頭雲臺的按鍵資訊後,直接傳送給樹莓派(如果通過網路遠端控制小車,則可以由樹莓派通過wifi socket程式設計獲取遠端的按鍵控制資訊,然後通過串列埠發給凌霄開發板,由後者控制小車,後續如果有時間,可以做一個這方面的功能)。
串列埠定義:
static SerialPort piPort = newSerialPort("COM4",9600);
在Main函式中,進行串列埠開啟操作:
piPort.Open();
在按鍵事件中傳送按鍵資訊:
static void ps2_Click(object sender, PS2.ButtonArgs e)
{
if (e.key == PS2.Key.RRocker)
{
PS2 ps2 = (PS2)sender;
PS2.ButtonArgsbutton = ps2.GetButton(PS2.Key.L2);
if (button.state == 1) //按下L2按鍵,我們才傳送搖桿的資訊
{
byte[] buffer = newbyte[] { 0xAA, (byte)e.x,(byte)e.y, 0x55 };
piPort.Write(buffer, 0, 4);
piPort.Flush();
}
}
}
2.4 樹莓派串列埠程式設計
開啟串列埠:
if ((fd = serialOpen ("/dev/ttyAMA0", 9600)) < 0)
{
fprintf (stderr,"Unable to open serial device: %s\n", strerror (errno)) ;
return 1;
}
接收資料:
while(1)
{
if(serialDataAvail (fd)>=4) //判斷接收緩衝區的個數
{
if (read (fd, buffer, 4) == 4)
{
if(buffer[0]==0xAA &&buffer[3]==0x55)
{
printf("x:%dy:%d\r\n",buffer[1],buffer[2]);
}
}
}
else
{
delay (10) ;
}
}
注:WiringPi對外封裝並沒有提供串列埠read函式,只提供了單個字元的獲取,我們直接採用linux本身提供的read函式。
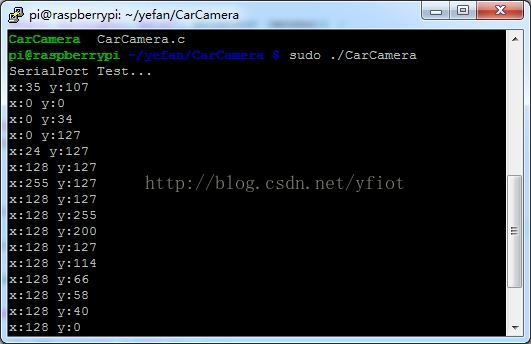
2.5 通訊測試
編寫相關檔案,傳輸到樹莓派,然後進行編譯。執行程式後,我們操作Sony PS2按鍵,應該可以看到如下資訊輸出:
3、樹莓派PWM輸出控制
樹莓派僅提供一個物理硬體PWM輸出IO,也就是GPIO1,第12管腳。實際測試發現,其週期為6.64us左右,WiringPi封裝的介面還不能修改該週期的大小(後續有時間可以研究一下底層相關程式碼),這不符合舵機控制的需要,舵機一般要求20ms左右的週期。另外攝像頭雲臺是控制兩路舵機,所以一個物理硬體PWM也不夠。所以我們採用軟PWM,也就是用普通的GPIO,通過時鐘中斷,模擬PWM方波輸出。
我們用GPIO1(12管腳)和GPIO2(13管腳)來模擬PWM輸出,所以硬體接線也是舵機的PWM訊號輸入管腳和樹莓派的這兩個管腳相連(舵機5V的供電專門供,不要直接從樹莓派5V管腳上取)。
PWM初始化程式碼:
#define PWM1 1
#define PWM2 2
softPwmCreate (PWM1, pwmV1, 200) ; //1=100us 7~28
softPwmCreate (PWM2, pwmV2, 200) ; //1=100us 7~28
在串列埠的資訊接收中,輸出PWM,從而控制舵機。
if (read (fd, buffer, 4) == 4)
{
if(buffer[0]==0xAA&& buffer[3]==0x55)
{
pwmV1 = 7 +(int)(buffer[1]*21.0/255.0); //x
pwmV2 = 7 + (int)(buffer[2]*21.0/255.0); //y
softPwmWrite(PWM1,pwmV1);
softPwmWrite(PWM2,pwmV2);
}
}
部署到樹莓派,編譯,執行,如果我們手頭有示波器,我們應該可以看到GPIO1和GPIO2輸出的波形。
以上程式如果和凌霄板共同執行,應該可以看到如下效果:
視訊連結:http://v.youku.com/v_show/id_XNjY2MTE1NjQ0.html
文章導航:
2、【樹莓派+.NET MF打造視訊監控智慧車】控制篇(.NETMF)
3、【樹莓派+.NET MF打造視訊監控智慧車】控制篇(樹莓派)
4、【樹莓派+.NET MF打造視訊監控智慧車】視訊篇
小結:
1、 樹莓派硬體設計小巧,會讓一些人因為樹莓派而喜歡上Linux。
2、 Linux畢竟不是一個實時系統,在做軟PWM的時候,你會發現舵機會抖動,並且幅度還不小(由於凌霄系統已經提供了16路PWM,所以後續還是有凌霄系統控制所有的舵機)
3、 Linux系統的映象大概2.8G左右,和凌霄系統的幾百K相比,還是挺重量級的,並且啟動時間會比較長一些。

給我老師的人工智慧教程打call!http://blog.csdn.net/jiangjunshow
