模糊控制——(4)Sugeno模糊模型
阿新 • • 發佈:2018-11-16
1、Sugeno模糊模型
傳統的模糊系統為Mamdani模糊模型,輸出為模糊量。
Sugeno模糊模型輸出隸屬函式為constant或linear,其函式形式為:
它與Mamdani模型的區別在於:
(1)輸出變數為常量或線性函式;
(2)輸出為精確量。
2 、模擬例項
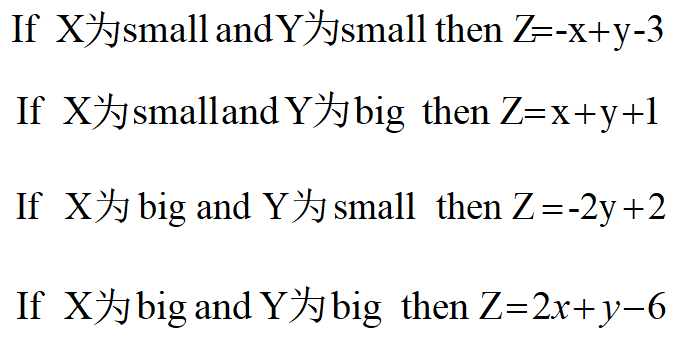
設輸入X∈[0,5] 和Y∈[0,10] ,將它們模糊化為兩個模糊量:小,大。輸出Z為輸入(X,Y)的線性函式,模糊規則為:
3、基於T-S(Takagi-Sugeno)模型的模糊控制
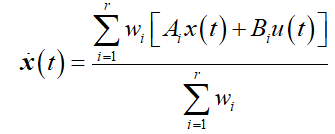
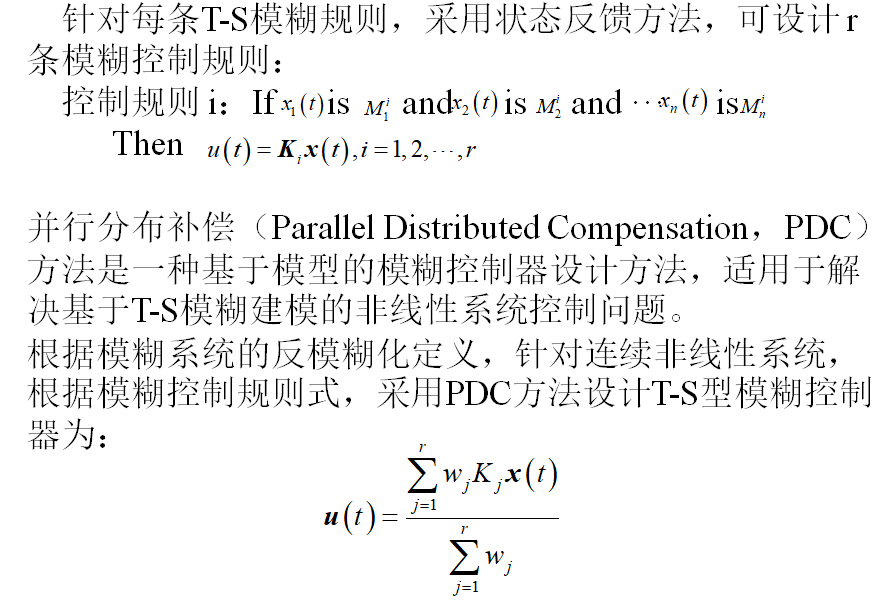
針對 n個狀態變數 m個控制輸入的連續非線性系統,其T-S型模糊模型可描述為以下 r條模糊規則:
![]()

根據模糊系統的反模糊化定義,由模糊規則構成的模糊模型總的輸出為:

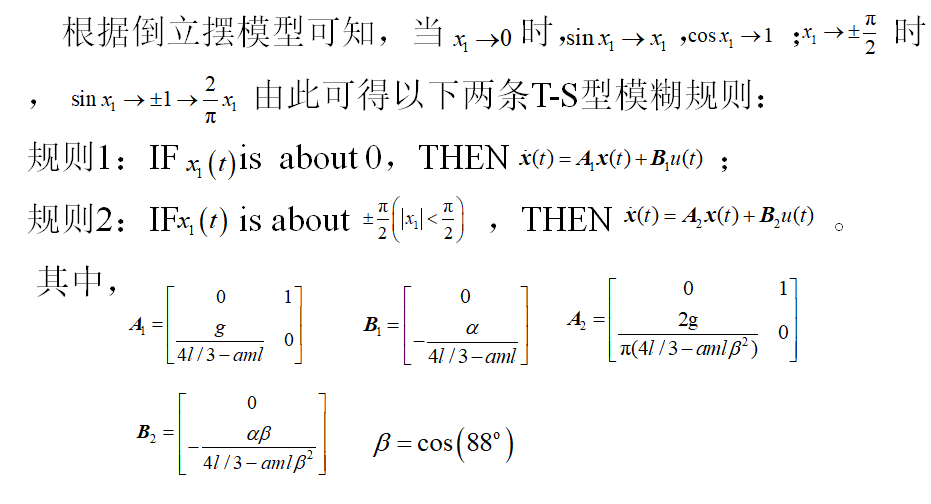
4、單級倒立擺的T-S模型模糊控制
倒立擺系統的控制問題一直是控制研究中的一個典型問題。控制的目標是通過給小車底座施加一個力 u(控制量),使小車停留在預定的位置,並使擺不倒下,即不超過一預先定義好的垂直偏離角度範圍。單級倒立擺模型為:
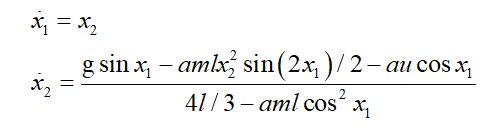
其中 x1為擺的角度, x2為擺的角速度,2l為擺長,u為加在小車上的控制輸入,a=1/(M+m) ,M 和m 分別為小車和擺的質量。
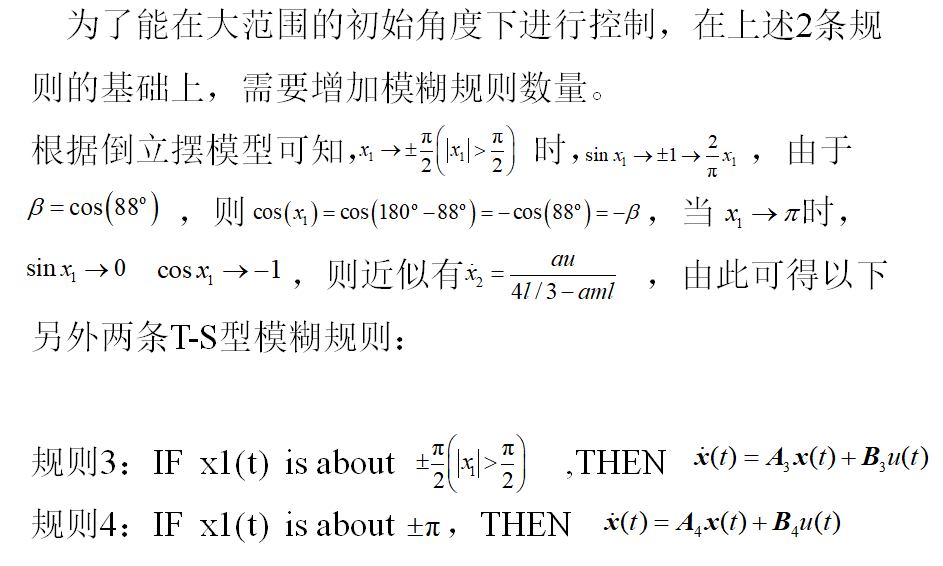
基於2條模糊規則的設計
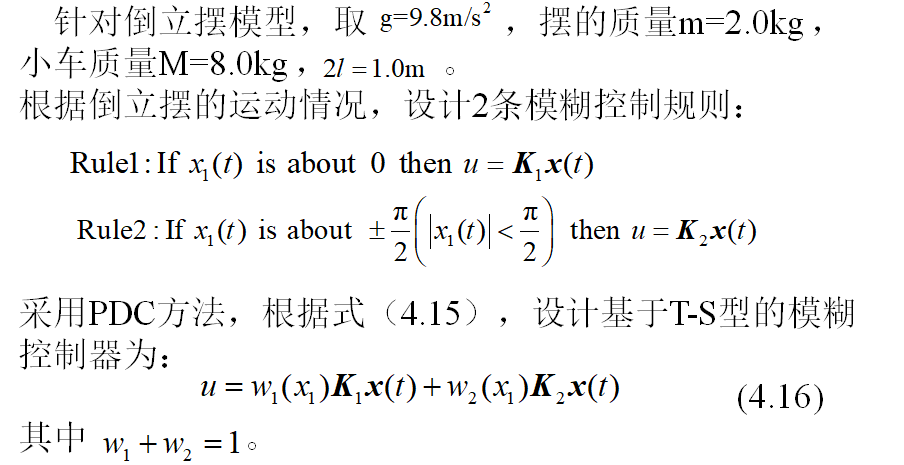
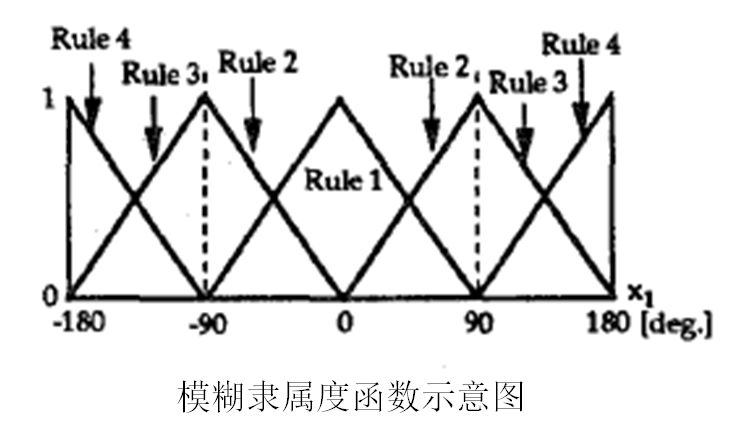
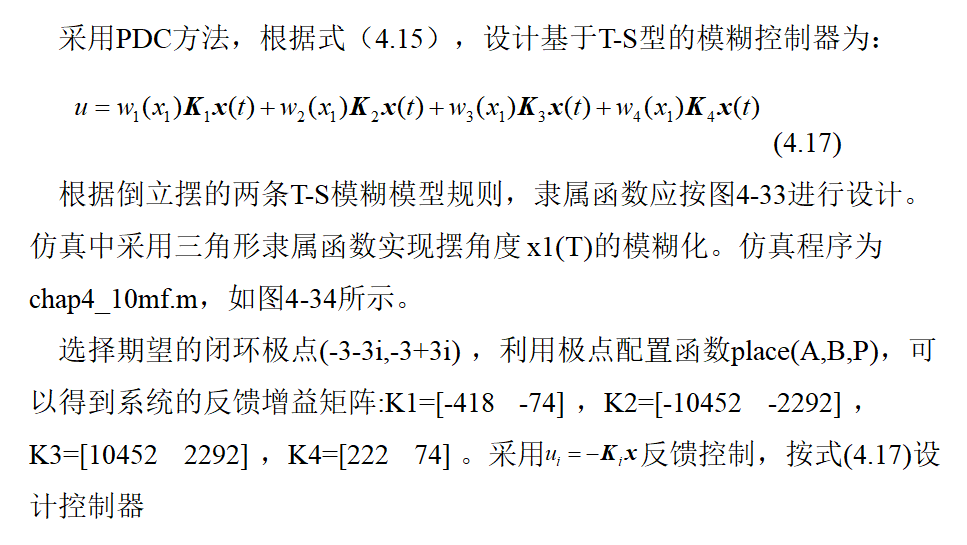
根據倒立擺的兩條T-S模糊模型規則,隸屬函式應按圖4-29進行設計。模擬中採用三角形隸屬函式實現擺角度x1(t)的模糊化。選擇期望的閉環極點(-3-3i,-3+3i) ,利用極點配置函式place(A,B,P),可以得到系統的反饋增益矩陣:K1=[-418 -74] ,K2=[-10452 -2292] 。 採用 ui=-Kix的反饋控制,按式(4.16)設計控制器.
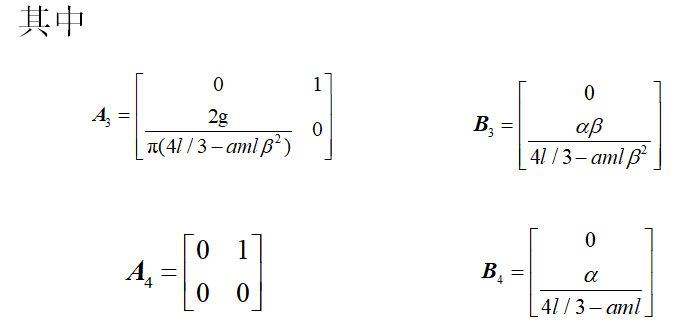
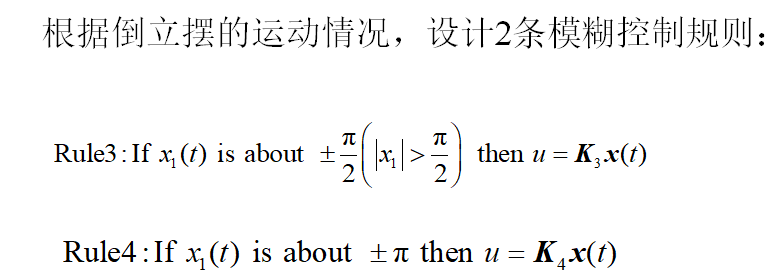
基於4條模糊規則的設計