
AGV小車典型設計演算法及應用
1. AGV小車的發展背景
在現代化工業的發展中,提倡高效,快速,可靠,提倡將人從簡單的工作中解放出來。機器人逐漸替代了人出現在各個工作崗位上。機器人具有可程式設計、可協調作業和基於感測器控制等特點,自動導向小車(Automated Guided Vehicle 簡稱AGV)便是移動機器人的一種,是現代化工業物流系統中的重要裝置,主要為儲運各類物料,為系統柔性化、整合化、高效執行提供了重要保證。
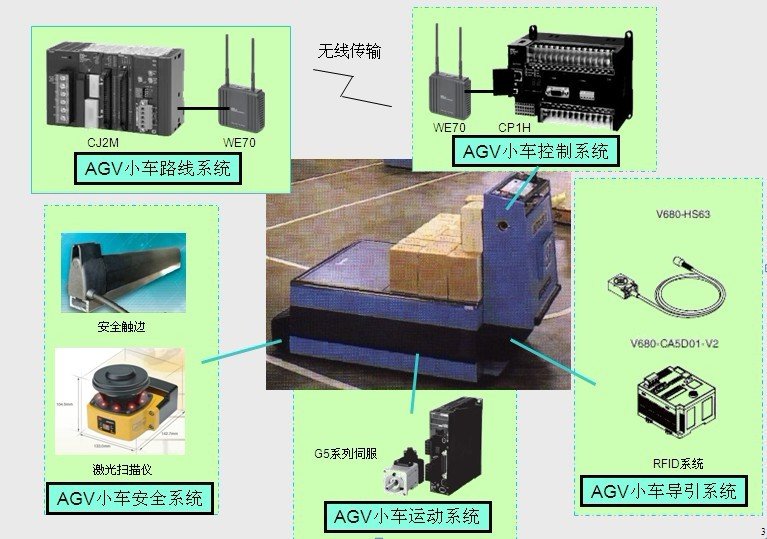
AGV小車構成系統圖
AGV小車有三個關鍵系統,執行系統、導引系統、控制系統,其它還包括有路線系統及安全保護系統等。本文著重介紹AGV小車的三個關鍵系統。
2.AGV小車執行系統
AGV小車執行系統是由車輪、減速器、制動器、電機及速度控制器等部分組成。AGV小車常設計成三種運動方式:只能向前;能向前與向後;能縱向、橫向、斜向及迴轉全方位運動。本次研究的AGV小車是能夠前進、後退及迴轉全方位運動。AGV小車能夠進行迴轉運動需要有轉向裝置。轉向裝置的結構也有三種:
1) 前輪轉向後輪驅動三輪車型。 車的轉向和驅動分別由兩個不同的電動機帶動,車體的前部為轉向車輪,車體後部為驅動電機驅動的兩個輪。其結構簡單、成本低,但定位精度較低。
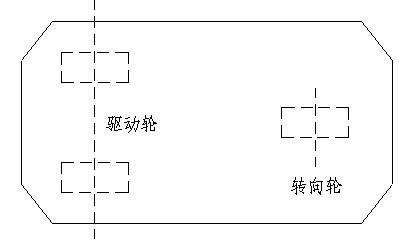
前輪轉向後輪驅動三輪車型
2) 差速轉向式四輪車型。 車體的中部有兩個驅動輪,由兩個電機分別驅動。前後部各有一個轉向輪(自由輪)。通過控制中部兩個輪的速度比可實現車體的轉向,並實現前後雙向行駛和轉向。這種方式結構簡單,定位精度較高。
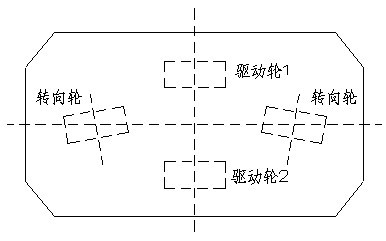
差速轉向式四輪車型
3) 全輪轉向式四輪車型。 車體的前後部各有兩個驅動和轉向一體化車輪,每個車輪分別由各自的電動機驅動,可實現沿縱向、橫向、斜向和迴轉方向任意路線行走,控制較複雜。
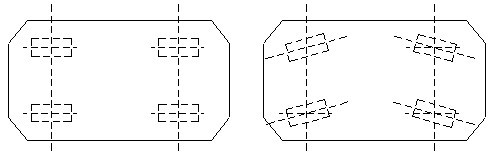
全輪轉向式四輪車型
從成本及系統應用考慮,本文著重介紹差速轉向式四輪車型。兩驅動車輪由兩伺服驅動器控制,伺服驅動器通過改變兩車輪的速度大小、方向,實現AGV小車的前進、後退、加減速及轉向動作。
AGV小車通過伺服控制,很容易實現前進、後退及加減速,但如何通過改變兩驅動輪的速度差,實現AGV小車的轉向及糾偏?下面,我們首先了解一下差速轉向式四輪車的運動模型。
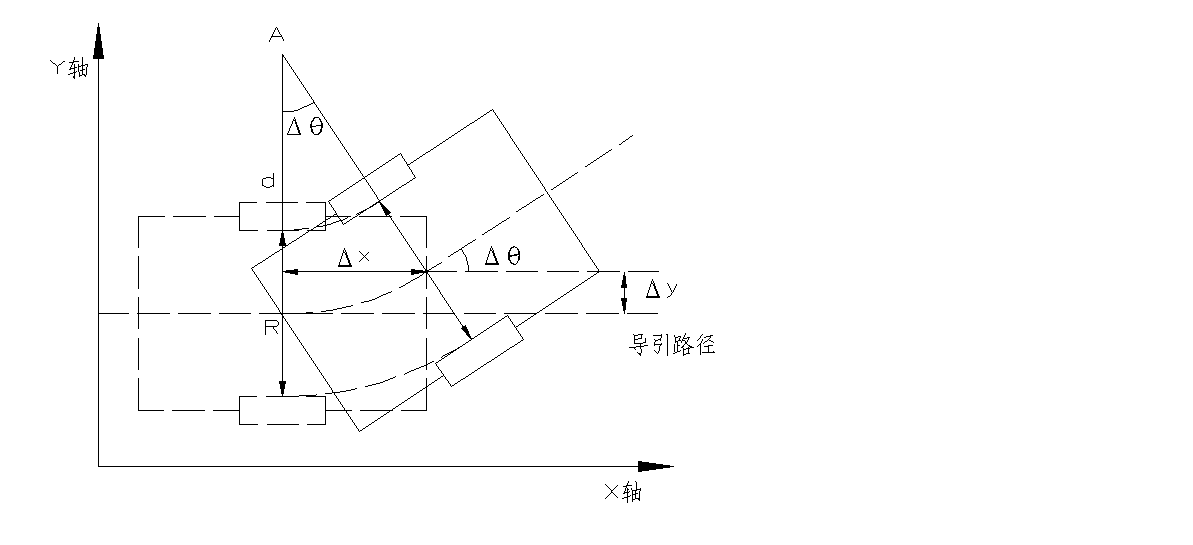
AGV小車運動狀態及偏差示意圖
圖中虛線表示的車體為初始位姿,實線表示的車體是在和初始時差為Δt時的位姿。AGV車子的左輪執行速度為Vr、右輪為Vl,AGV小車沿著A點作圓弧運動,轉彎半徑為d。可以得:
①
AGV小車運動偏移弧度為Δθ,容易得:
②
由式可得AGV小車運動偏移弧度Δθ與左右輪的速度關係式:
③
AGV小車在做圓弧運動時,在X軸上的變化量是ΔX,在Y軸上的變化量是ΔY,ΔX、ΔY與轉彎半徑d的關係為:
④ 
⑤
將①式代入④⑤式,可以得出ΔX、ΔY與左右輪執行速度的關係式:
⑥
⑦
所以,通過改變Vr及Vl可以實現AGV小車糾偏,轉向等運動控制。驅動輪的變速控制,有多種方法可選擇,包括變頻器控制、步進控制、伺服控制等。其中變頻器控制及伺服控制除了有高精度的速度控制外,還能提供靈活的轉矩控制。在AGV小車的運動模型中,其有幹摩擦力矩、慣性轉矩、粘性摩擦力矩、重力力矩、彈性力矩等。所以AGV小車在執行過程中,驅動器需要提供不同的力矩,AGV小車才能執行得更穩定。而伺服控制比變頻器擁有更高的速度控制精度、更小的安裝位置、更高的IP防護等級以及更好的停車制動功能。所以,伺服控制器作為AGV小車的運動控制系統使用是更為適合。
3.AGV小車導引系統
AGV小車能自動執行,需要有導引裝置。常用的導引方式分為兩大類:車外預定路徑和非預定路徑方式。下面對兩種方式分別作介紹。
1)車外預定路徑導引方式是指在行駛的路徑上設定導引用的資訊媒介物,AGV通過檢測出它的資訊而得到導向的導引方式,如電磁導引、色帶導引、磁帶導引(又稱磁性導引)等。
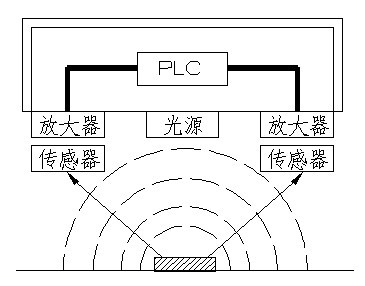
色帶導引示意圖
上圖為光學導引示意圖,這種導引方式是在地面上連續敷設一條帶顏色的帶子,在車輛的底部中央安裝光源以及在兩邊安裝相同的色標感測器(如歐姆龍產品E3X-DA□AN-S),它們同時檢測色帶反射回來的色度值,並將色度值轉換成模擬量傳送給AGV小車的中央控制系統--PLC。當AGV小車執行在正確的執行軌道上時,兩放大器反饋給PLC模擬量的值相同,當AGV小車偏離軌道時,兩放大器反饋給PLC的值便有差別,PLC根據兩模擬量的差值便能判斷出AGV小車偏離執行軌道的程度及方向,並通過控制運動控制器使AGV小車往正確的軌道執行。
色帶導引靈活性較好,地面路線設定簡單易行,但對色帶的汙染和機械磨損十分敏感,對環境要求高,導引可靠性較差,精度較低。在預定路徑導引方式中,還有電磁導引等。電磁導引是較為傳統的導引方式之一,目前仍被許多系統採用,它是在AGV的行駛路徑上埋設磁條,並在磁條上載入導引頻率。磁導航感測器通過檢測磁條上的磁場,便能判斷出AGV小車的執行是否偏離軌道。
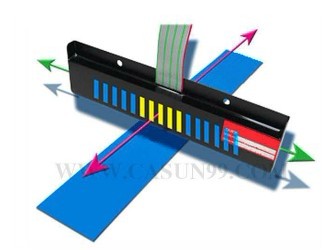
磁導航感測器工作原理圖
上圖為磁導航感測器的工作原理圖,磁導航感測器可安裝在AGV小車的底部中央,距離磁條表面20-40mm,磁條寬度為30-50mm,厚度1mm。磁導航感測器內部每隔10mm排佈一個取樣點,共排布16個取樣點,能夠檢測出磁條上方的磁場,每一個取樣點都有一路對應輸出。AGV執行時,磁導航感測器內部垂直於磁條上方的連續3-5個取樣點會輸出訊號(如圖中磁導航感測器上黃色條為檢測到磁場訊號的取樣點,藍色條為未能檢測出磁場的取樣點)。AGV小車的控制系統便能依靠16路通道中輸出的3-5路訊號,可以判斷磁條相對於磁導航感測器的偏離位置,自動作出調整,確保沿磁條前行。
擁有了執行路徑後,還需要在每個工位及節點設定位置標籤,使AGV小車在執行到特定位置時,能做出加速、減速、停車、拐彎等動作。如在每個工位敷設不同顏色的色條,當色標感測器檢測出到顏色訊號時,小車控制系統便能掌握小車執行的位置。色條作為位置標籤,使用簡單、方便,但對外部環境要求較高,容易產生誤檢測,可靠性差。
AGV小車系統還可以使用RFID標籤作為位置標籤。RFID標籤能儲存大量的位置資訊,並能多次讀寫,RFID標籤的體積較小安裝方便,抗干擾能力強。RFID讀寫器安裝在AGV小車前方底部,對標籤資訊進行讀取,並通過控制系統控制小車的下一步動作。
歐姆龍公司擁有成熟的RFID系列產品。RFID主推產品有V680系列,包括有讀寫器V680-CA5D01-V2,能讀寫ID標籤,可通過RS232/485介面與PLC通訊;天線V680-HS63,天線的讀寫距離為7.0~30.0mm,ID標籤V680-D2KF67M,使用FRAM用來作為儲存器,不需要電池,外殼材質為填充樹脂,形狀為40×40×4.5mm。下圖為AGV小車RFID系統工作原理圖。

AGV小車RFID系統工作原理圖
電磁導引引線隱蔽,不易汙染和破損,便於控制,對聲光無干擾,製造成本低。但所有車外預定路徑導引方式都存在共同缺點是路徑難以更改擴充套件,對複雜路徑的侷限性大。與車外預定路徑導引相反,非預定路徑導引方式沒有固定路徑,其自主性更高。
2)非預定路徑導引方式是指AGV小車在執行中沒有固定的路徑,其通過鐳射、視覺、GPS等方式,掌握執行中所處的位置,並自主地決定行駛路徑的導引方式。其中,較常用的是鐳射導引方式。
鐳射導引是在AGV行駛路徑的周圍安裝位置精確的鐳射反射板,AGV通過鐳射掃描器發射鐳射束,同時採集由反射板反射的鐳射束,來確定其當前的位置和航向,並通過連續的三角幾何運算來實現AGV的導引。
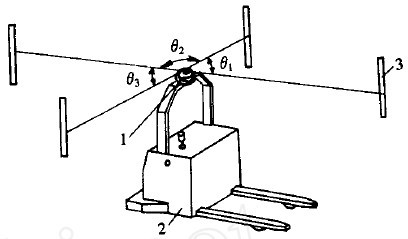
鐳射掃描器工作示意圖
非預定路徑導引方式優點是:AGV定位精確,地面無需其他定位設施,行駛路徑靈活多變,適合多種現場環境。但它有一個很大的缺點是製造成本高,所以在本文不作重點討論。
4.AGV小車控制系統
AGV小車系統除了上文提及的執行系統及導引系統外,還需要有中央控制系統,它能採集導引系統返回的位置資訊,通過運算轉換,反作用於執行系統,使AGV小車能做出需要的動作。
歐姆龍CP1H系列PLC便可以作為AGV小車的中央控制器,它可以接收導引系統返回的模擬訊號或開關量訊號;它可以安裝RS232、RS422/485接外掛,通過序列通訊方式與RFID控制器通訊,採集ID標籤的位置資訊;它能輸出控制伺服執行的脈衝訊號或模擬量訊號;CP1H的程式設計命令較簡單,程式修改方便,而且還自帶有AGV小車執行中需用到的PID等高階命令。所以CP1H非常適合用於AGV小車的中央控制器。
小結
AGV小車系統是一個較複雜、跨學科、多系統的運動控制課題,因為本人知識底子較淺,本文對AGV各系統的介紹都是很表面及簡單,離實現AGV小車控制還有很遠的距離。以後我還需要研究“如何通過模糊PID控制AGV小車兩輪的速度差,使AGV小車的執行更穩定”、“AGV小車在各執行狀態時的力矩情況”、“如何使用梯形圖編寫AGV小車執行程式”等課題,使AGV小車設計及應用更趨完善。