
深度強化學習cs294 Lecture6: Actor-Critic Algorithms
深度強化學習cs294 Lecture6: Actor-Critic Algorithms
複習一下上節課的策略梯度演算法。主要就是對目標函式的定義以及梯度的計算。還有一些減小方差的方法以及Importance Sampling的方法。
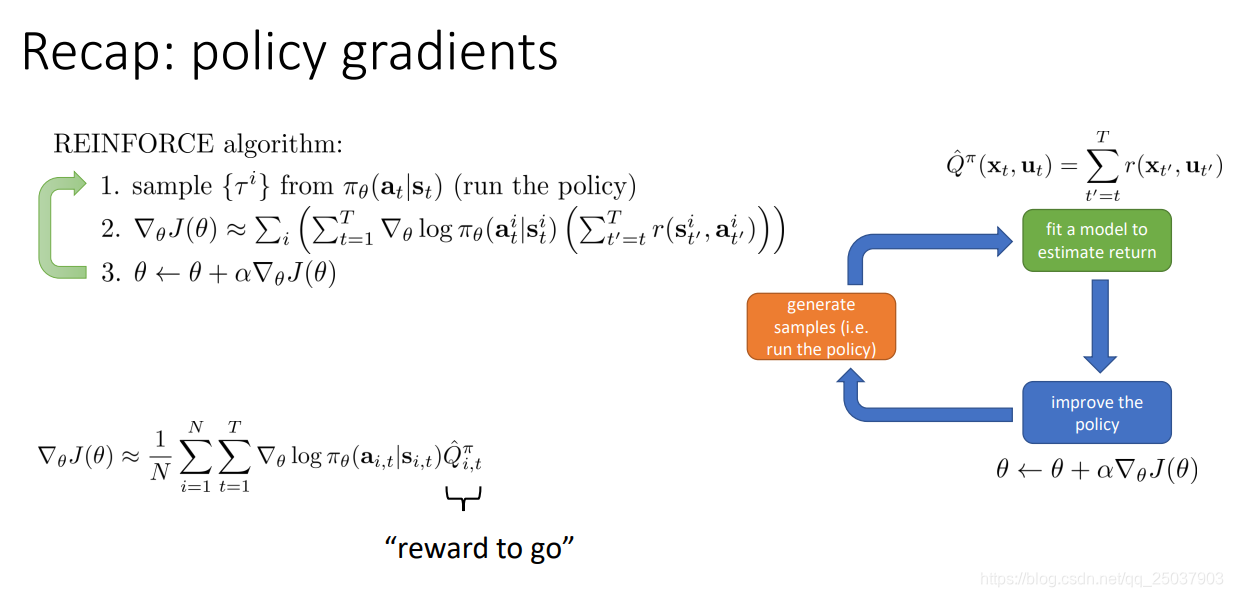
1. Improving the policy gradient with a critic
在公式裡從當前開始得到的反饋值之和
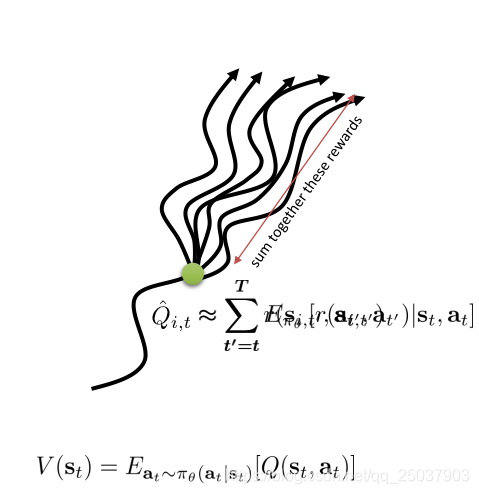
有一個更好的估計方式:

這表示當前狀態
採取了動作
之後後面會得到的所有反饋和的期望值。對應的有一個在當前狀態
的期望值,就是對Q進行在
上求期望:
在policy gradient方法中使用一個常數b作為一個baseline來減小梯度的方差。這裡的b就是對Q值的一個平均,那麼就可以使用V來替代,而原本的
也可以用新的期望值
替代。這樣就得到了兩個期望值的差值,我們把這個值叫做advantage函式。
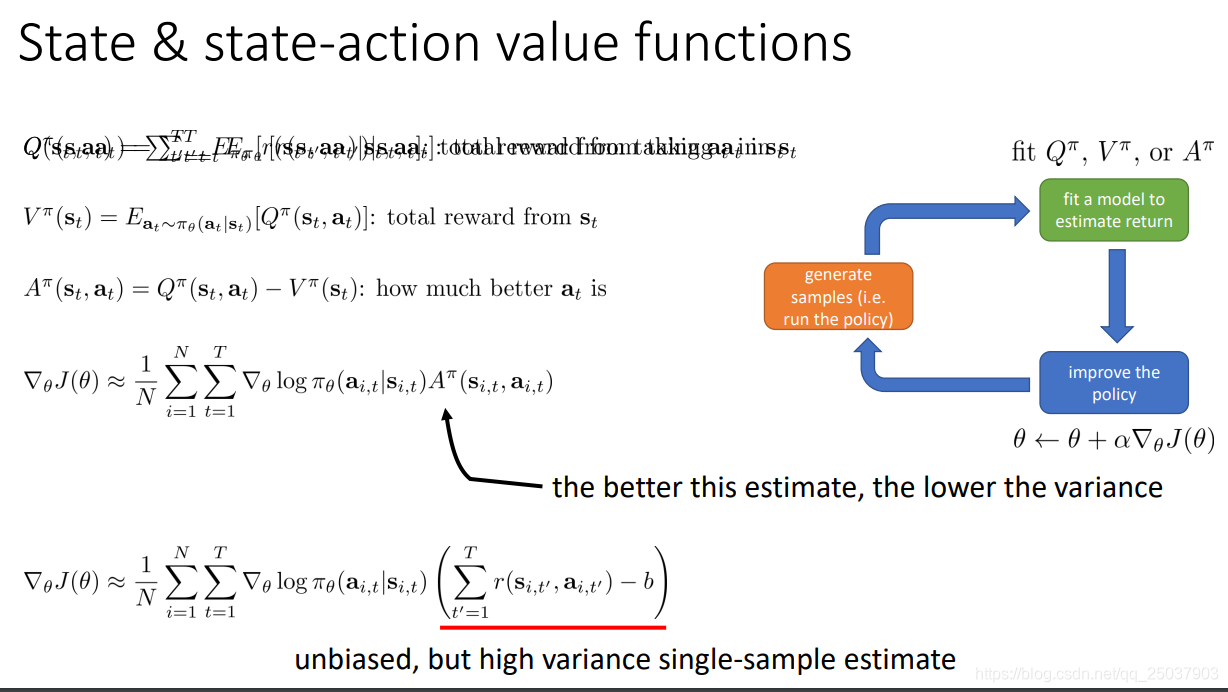
使用了advantage函式的梯度求導,如果advantage函式估計得越準確,那麼梯度的方差就會越小。而原來的使用一個序列的反饋值之和減去b的方式,方差更大。不過是一個無偏估計。
因此使用新的期望函式來計算梯度,但是需要計算三個不同的值
比較麻煩,可以看一下它們之間的關係。因為
對應的是一個固定的狀態動作對
,因此有一步的反饋值r已經固定不變了,也就是
,如果採用取樣近似期望的形式可以寫為
。這樣我們在計算梯度的過程中只需要計算一個期望函式
即可,這個一般也使用神經網路來進行逼近。

2. The policy evaluation problem
從期望值V的定義可以看出,強化學習的目標函式其實就是這個值關於初始狀態
的期望值。也就是說計算
就是對當前的策略進行一個評價,評價當前策略是好是壞。我們有兩種MC方法能夠估算出對應的V值,但是第二種對序列進行平均的方式不太好實現,因此一般使用第一個簡單的形式:

因此我們就有了目標label,下面用監督學習的方式來對這個V值做一個擬合即可,擬合的目標函式是均方誤差,這樣訓練就能得到一個能夠擬合出狀態值函式的神經網路:

不過實際上我們可以做得更精確一些。因為這裡直接使用了一個序列樣本的反饋和作為目標值,實際上方差會很大。可以利用一個近似的方式來減小方差。
。這個方法叫做自舉。其中使用了下一個狀態的估計值來計算前一個時間狀態的估計值。這樣做能夠減小方差,因為計算的結果不是一個取樣而是一個期望。但是會引入一些誤差,因為當前的估計函式並不是真實的V值。

有很多成功的例子都使用了這個方法,比如TD-gammon和Alphago。

於是我們就得到了一個新的形式的actor-critic演算法:

3. Discount factors
上面的actor-critic演算法裡第一步還需要取樣一整個序列。想要變成每次只採樣一個狀態即可,還需要先引入Discount factors的設定。
因為值函式V的定義是當前狀態以後所有反饋值的和,在有限步長的任務中沒有問題,但是如果是一個