
機器學習---演算法---神經網路入門
轉自:http://www.ruanyifeng.com/blog/2017/07/neural-network.html
眼下最熱門的技術,絕對是人工智慧。
人工智慧的底層模型是"神經網路"(neural network)。許多複雜的應用(比如模式識別、自動控制)和高階模型(比如深度學習)都基於它。學習人工智慧,一定是從它開始。
什麼是神經網路呢?網上似乎缺乏通俗的解釋。
前兩天,我讀到 Michael Nielsen 的開源教材《神經網路與深度學習》(Neural Networks and Deep Learning),意外發現裡面的解釋非常好懂。下面,我就按照這本書,介紹什麼是神經網路。
這裡我要感謝優達學城的贊助,本文結尾有他們的《前端開發(進階)》課程的訊息,歡迎關注。
一、感知器
歷史上,科學家一直希望模擬人的大腦,造出可以思考的機器。人為什麼能夠思考?科學家發現,原因在於人體的神經網路。
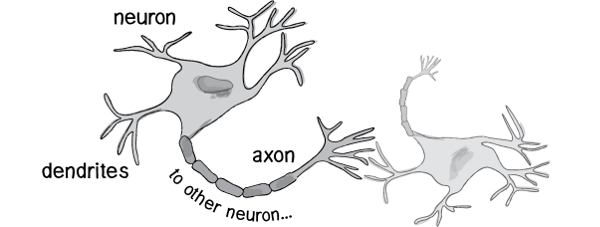
- 外部刺激通過神經末梢,轉化為電訊號,轉導到神經細胞(又叫神經元)。
- 無數神經元構成神經中樞。
- 神經中樞綜合各種訊號,做出判斷。
- 人體根據神經中樞的指令,對外部刺激做出反應。
既然思考的基礎是神經元,如果能夠"人造神經元"(artificial neuron),就能組成人工神經網路,模擬思考。上個世紀六十年代,提出了最早的"人造神經元"模型,叫做
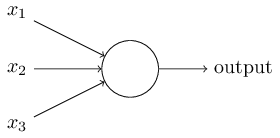
上圖的圓圈就代表一個感知器。它接受多個輸入(x1,x2,x3...),產生一個輸出(output),好比神經末梢感受各種外部環境的變化,最後產生電訊號。
為了簡化模型,我們約定每種輸入只有兩種可能:1 或 0。如果所有輸入都是1,表示各種條件都成立,輸出就是1;如果所有輸入都是0,表示條件都不成立,輸出就是0。
二、感知器的例子
下面來看一個例子。城裡正在舉辦一年一度的遊戲動漫展覽,小明拿不定主意,週末要不要去參觀。

他決定考慮三個因素。
- 天氣:週末是否晴天?
- 同伴:能否找到人一起去?
- 價格:門票是否可承受?
這就構成一個感知器。上面三個因素就是外部輸入,最後的決定就是感知器的輸出。如果三個因素都是 Yes(使用1表示),輸出就是1(去參觀);如果都是 No(使用0表示),輸出就是0(不去參觀)。
三、權重和閾值
看到這裡,你肯定會問:如果某些因素成立,另一些因素不成立,輸出是什麼?比如,週末是好天氣,門票也不貴,但是小明找不到同伴,他還要不要去參觀呢?
現實中,各種因素很少具有同等重要性:某些因素是決定性因素,另一些因素是次要因素。因此,可以給這些因素指定權重(weight),代表它們不同的重要性。
- 天氣:權重為8
- 同伴:權重為4
- 價格:權重為4
上面的權重表示,天氣是決定性因素,同伴和價格都是次要因素。
如果三個因素都為1,它們乘以權重的總和就是 8 + 4 + 4 = 16。如果天氣和價格因素為1,同伴因素為0,總和就變為 8 + 0 + 4 = 12。
這時,還需要指定一個閾值(threshold)。如果總和大於閾值,感知器輸出1,否則輸出0。假定閾值為8,那麼 12 > 8,小明決定去參觀。閾值的高低代表了意願的強烈,閾值越低就表示越想去,越高就越不想去。
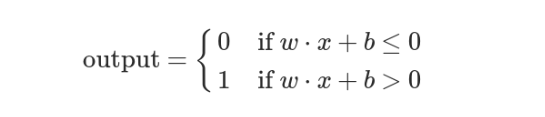
上面的決策過程,使用數學表達如下。
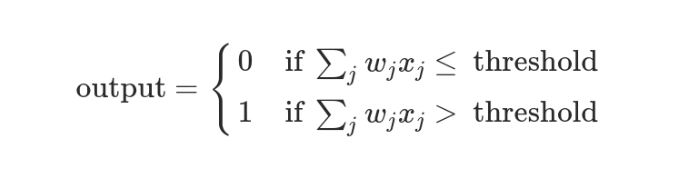
上面公式中,x表示各種外部因素,w表示對應的權重。
四、決策模型
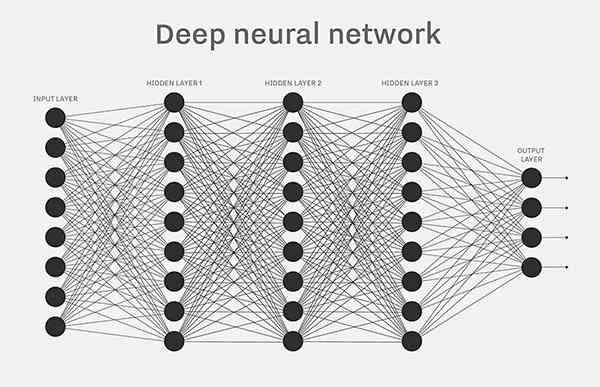
單個的感知器構成了一個簡單的決策模型,已經可以拿來用了。真實世界中,實際的決策模型則要複雜得多,是由多個感知器組成的多層網路。
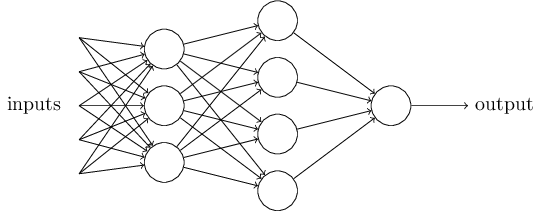
上圖中,底層感知器接收外部輸入,做出判斷以後,再發出訊號,作為上層感知器的輸入,直至得到最後的結果。(注意:感知器的輸出依然只有一個,但是可以傳送給多個目標。)
這張圖裡,訊號都是單向的,即下層感知器的輸出總是上層感知器的輸入。現實中,有可能發生迴圈傳遞,即 A 傳給 B,B 傳給 C,C 又傳給 A,這稱為"遞迴神經網路"(recurrent neural network),本文不涉及。
五、向量化
為了方便後面的討論,需要對上面的模型進行一些數學處理。
- 外部因素
x1、x2、x3寫成向量<x1, x2, x3>,簡寫為x- 權重
w1、w2、w3也寫成向量(w1, w2, w3),簡寫為w- 定義運算
w⋅x = ∑ wx,即w和x的點運算,等於因素與權重的乘積之和- 定義
b等於負的閾值b = -threshold
感知器模型就變成了下面這樣。
六、神經網路的運作過程
一個神經網路的搭建,需要滿足三個條件。
- 輸入和輸出
- 權重(
w)和閾值(b)- 多層感知器的結構
也就是說,需要事先畫出上面出現的那張圖。
其中,最困難的部分就是確定權重(w)和閾值(b)。目前為止,這兩個值都是主觀給出的,但現實中很難估計它們的值,必需有一種方法,可以找出答案。
這種方法就是試錯法。其他引數都不變,w(或b)的微小變動,記作Δw(或Δb),然後觀察輸出有什麼變化。不斷重複這個過程,直至得到對應最精確輸出的那組w和b,就是我們要的值。這個過程稱為模型的訓練。

因此,神經網路的運作過程如下。
- 確定輸入和輸出
- 找到一種或多種演算法,可以從輸入得到輸出
- 找到一組已知答案的資料集,用來訓練模型,估算
w和b- 一旦新的資料產生,輸入模型,就可以得到結果,同時對
w和b進行校正
可以看到,整個過程需要海量計算。所以,神經網路直到最近這幾年才有實用價值,而且一般的 CPU 還不行,要使用專門為機器學習定製的 GPU 來計算。

七、神經網路的例子
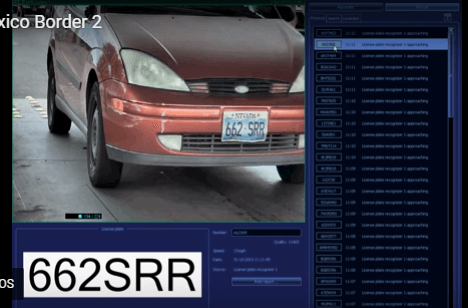
下面通過車牌自動識別的例子,來解釋神經網路。
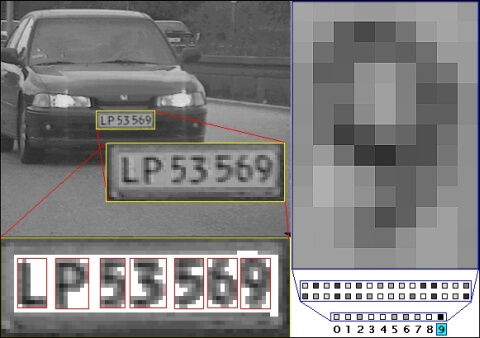
所謂"車牌自動識別",就是高速公路的探頭拍下車牌照片,計算機識別出照片裡的數字。
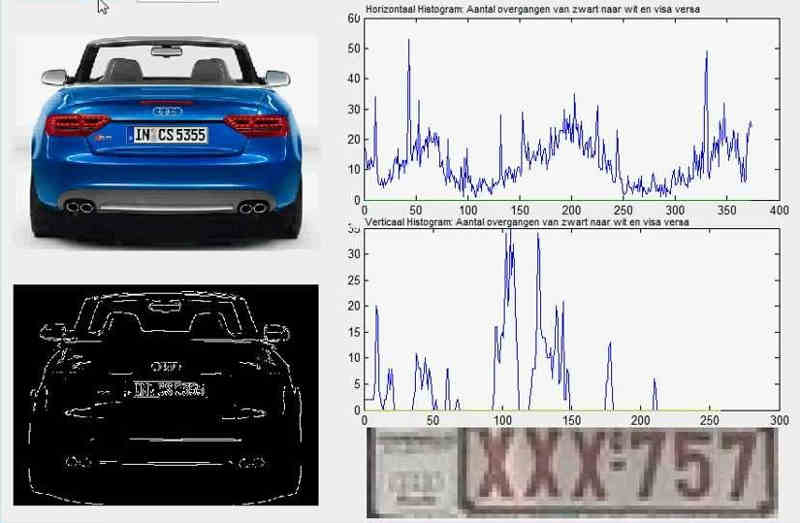
這個例子裡面,車牌照片就是輸入,車牌號碼就是輸出,照片的清晰度可以設定權重(w)。然後,找到一種或多種影象比對演算法,作為感知器。演算法的得到結果是一個概率,比如75%的概率可以確定是數字1。這就需要設定一個閾值(b)(比如85%的可信度),低於這個門檻結果就無效。
一組已經識別好的車牌照片,作為訓練集資料,輸入模型。不斷調整各種引數,直至找到正確率最高的引數組合。以後拿到新照片,就可以直接給出結果了。
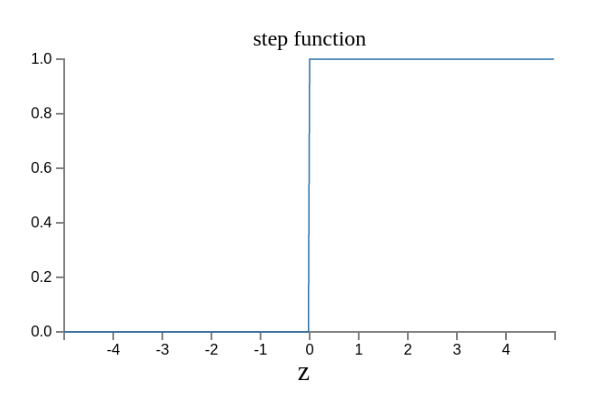
八、輸出的連續性
上面的模型有一個問題沒有解決,按照假設,輸出只有兩種結果:0和1。但是,模型要求w或b的微小變化,會引發輸出的變化。如果只輸出0和1,未免也太不敏感了,無法保證訓練的正確性,因此必須將"輸出"改造成一個連續性函式。
這就需要進行一點簡單的數學改造。
首先,將感知器的計算結果wx + b記為z。
z = wx + b
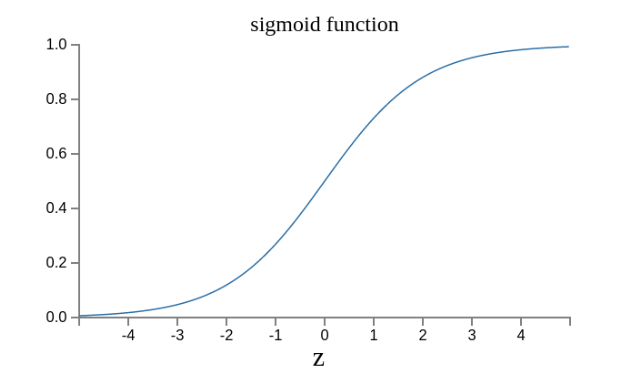
然後,計算下面的式子,將結果記為σ(z)。
σ(z) = 1 / (1 + e^(-z))
這是因為如果z趨向正無窮z → +∞(表示感知器強烈匹配),那麼σ(z) → 1;如果z趨向負無窮z → -∞(表示感知器強烈不匹配),那麼σ(z) → 0。也就是說,只要使用σ(z)當作輸出結果,那麼輸出就會變成一個連續性函式。
原來的輸出曲線是下面這樣。
現在變成了這樣。
實際上,還可以證明Δσ滿足下面的公式。
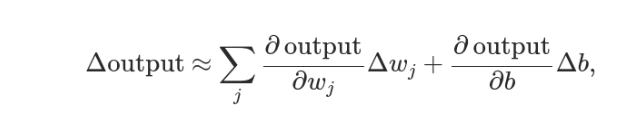
即Δσ和Δw和Δb之間是線性關係,變化率是偏導數。這就有利於精確推算出w和b的值了。