
STC15微控制器使用HC-SR04超聲波測距模組
阿新 • • 發佈:2018-12-11
目錄
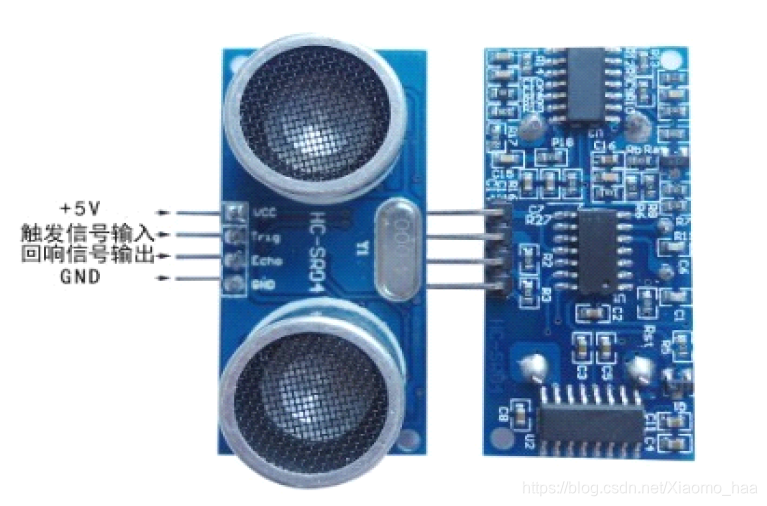
【HC-SR04】
HC-HR04超聲波測距可提供2cm-400cm的非接觸式距離感測功能,測距精度可達3mm。
基本工作原理
1、採用IO口TRIG觸發測距,給最少10us的高電平信呈。
2、模組自動傳送8個40KHz的方波,自動檢測是否有訊號返回。
3、有訊號返回,通過IO口ECHO輸出一個高電平,高電平持續時間就是超聲波從發射到返回的時間。測試距離=(高電平時間*聲速(340m/s))/2.
時序圖
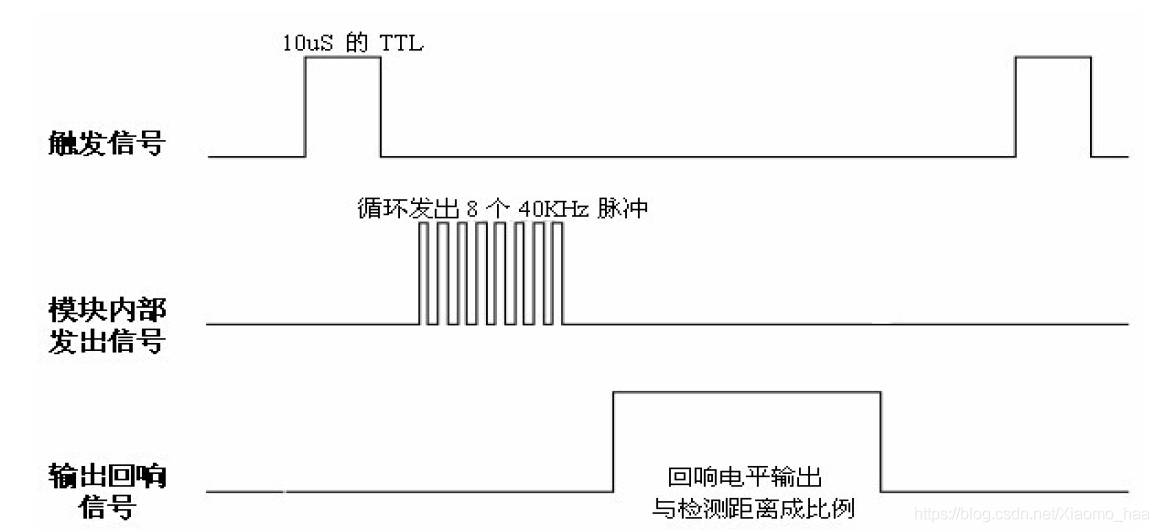
以上時序圖表明你只需要提供一個10uS以上脈衝觸發訊號,該模組內部將:發出8個40kHz週期電平並檢測回波。一.旦檢測到有回波訊號則輸出迴響訊號。迴響訊號的脈衝寬度與所測的距離成正比。由此通過發射訊號到收到的迴響訊號時間間隔可以計算得到距離。公式: uS/58=釐米或者uS/148=英寸;或是:距離=高電平時間*聲速(340M/S) /2;建議測量週期為60ms以上,以防止發射訊號對迴響訊號的影響。
【程式】
我使用的是STC15F2K60S2微控制器,內部晶振設定12M。以下程式省略管腳定義等無關語句,僅提供程式思路供參考。
uchar Flag_hypertelorism = 0; //超聲波距離過遠標誌 float distance = 0; uchar Flag_Fucker = 0; //超聲波開啟標誌 void main() { Time0_Init(); Time1_Init(); while(1) { if(Flag_Fucker == 1) Ultrasonic(); } } /*初始化定時器0*/ void Time0_Init(void) { // AUXR |= 0x80; //定時器0為1T模式 AUXR &= 0x7f; //定時器0為12T模式 TMOD = 0x00; //設定定時器為16位自動重灌載 TL0 = 0x60; //初始化計時值 4ms TH0 = 0xF0; TR0 = 1; //定時器0開始計時 ET0 = 1; //使能定時器0中斷 EA = 1; } //定時器1初始化 void Time1_Init() { // AUXR |= 0x40; //定時器1為1T模式 AUXR &= 0xdf; //定時器1為12T模式 TMOD = 0x00; //設定定時器1為16位自動重灌載 TL1 = 0x60; //初始化計時值 4ms TH1 = 0xF0; // TR1 = 1; //暫時不開啟定時器1計時 ET1 = 1; //使能定時器1中斷 EA = 1; } /*定時器0中斷*/ void Time0 () interrupt 1 { static uchar time = 0; // 自動裝載模式下可省略 // TL0 = T0MS; // TH0 = T0MS >> 8; time++; if(time == 25) //100ms測距一次 { time = 0; Flag_Fucker = 1; } } //定時器1溢位中斷 void Time1() interrupt 3 { Flag_hypertelorism = 1; //超聲波距離過遠 } //超聲波測距 void Ultrasonic() { uchar i; Trig = 1; //超聲波觸發訊號開啟 _nop_(); //延時10us以上 i = 30; while(--i); Trig = 0; //超聲波觸發訊號關閉 while(!Echo); //Echo為0時等待 TR1 = 1; //開啟定時器1計時 while(Echo == 1 && TF1 == 0); //Echo為1時等待 TR1 = 0; //關閉定時器1計時 Distance_Count(); //計算距離 Flag_Fucker = 0; //關閉超聲波測距 } //距離值計算 void Distance_Count() { float Text_time = 0; if(Flag_hypertelorism == 0) { Text_time = ((TH1 - temp_TH) * 256 + (TL1 - temp_TL)) / 2.0; TL1 = 0x60; //初始化計時值 4ms TH1 = 0xF0; distance = Text_time * 0.34; //單位mm } else { distance = 9999; Flag_hypertelorism = 0; } }