
STM32與HC-SR04超聲波測距
首先,先來看一下這個模組的基本功能和原理。
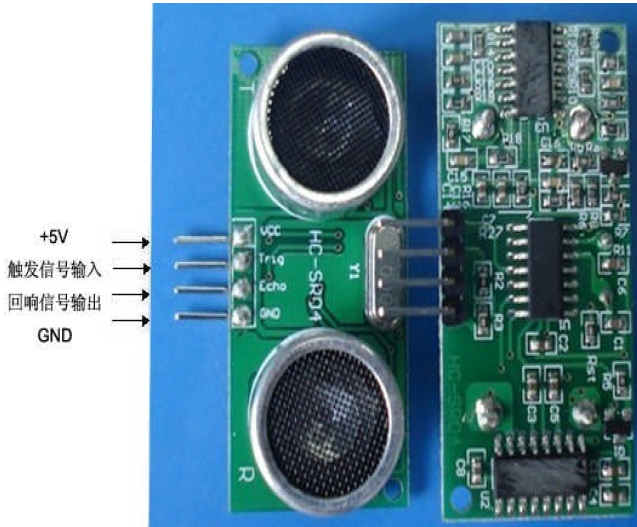
HC-SR04超聲波測距模組可提供2cm-400cm的非接觸式距離感測功能,測距精度可達高到3mm;模組包括超聲波發射器、接收器與控制電路。像智慧小車的測距以及轉向,或是一些專案中,常常會用到。智慧小車測距可以及時發現前方的障礙物,使智慧小車可以及時轉向,避開障礙物。
注意是5v輸入,但是我用stm32 的3.3v輸入也是沒有問題的。
二.工作原理
1.給超聲波模組接入電源和地。
2.給脈衝觸發引腳(trig)輸入一個長為20us的高電平方波
3.輸入方波後,模組會自動發射8個40KHz的聲波,與此同時回波引腳(echo)端的電平會由0變為1;(此時應該啟動定時器計時)
4.當超聲波返回被模組接收到時,回波引 腳端的電平會由1變為0;(此時應該停止定時器計數),定時器記下的這個時間即為超聲波由發射到返回的總時長。
5.根據聲音在空氣中的速度為344米/秒,即可計算出所測的距離。
要學習和應用感測器,學會看懂感測器的時序圖是很關鍵的,所以我們來看一下HC-SR04的時序觸發圖。
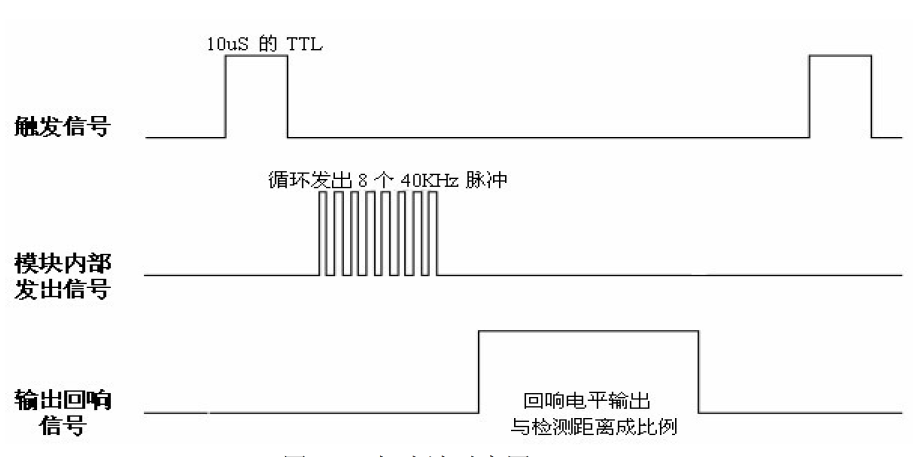
我們來分析一下這個時序圖,先由觸發訊號啟動HC-RS04測距模組,也就是說,主機要先發送至少10us的高電平,觸發HC-RS04,模組內部發出訊號是感測器自動迴應的,我們不用去管它。輸出迴響訊號是我們需要關注的。訊號輸出的高電平就是超聲波發出到重新返回接收所用的時間。用定時器,可以把這段時間記錄下來,算出距離,別忘了結果要除於2,因為總時間是傳送和接收的時間總和。
下面是親測可用的驅動程式。
晶片型號為stm32f103zet6,超聲波測距後通過串列埠列印到電腦上面。
驅動和測距;
//超聲波測距 #include "hcsr04.h" #define HCSR04_PORT GPIOB #define HCSR04_CLK RCC_APB2Periph_GPIOB #define HCSR04_TRIG GPIO_Pin_5 #define HCSR04_ECHO GPIO_Pin_6 #define TRIG_Send PBout(5) #define ECHO_Reci PBin(6) u16 msHcCount = 0;//ms計數 void Hcsr04Init() { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //生成用於定時器設定的結構體 GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE); //IO初始化 GPIO_InitStructure.GPIO_Pin =HCSR04_TRIG; //傳送電平引腳 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推輓輸出 GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG); GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO; //返回電平引腳 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入 GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO); //定時器初始化 使用基本定時器TIM6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE); //使能對應RCC時鐘 //配置定時器基礎結構體 TIM_DeInit(TIM2); TIM_TimeBaseStructure.TIM_Period = (1000-1); //設定在下一個更新事件裝入活動的自動重灌載暫存器週期的值 計數到1000為1ms TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //設定用來作為TIMx時鐘頻率除數的預分頻值 1M的計數頻率 1US計數 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;//不分頻 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式 TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的引數初始化TIMx的時間基數單位 TIM_ClearFlag(TIM6, TIM_FLAG_Update); //清除更新中斷,免得一開啟中斷立即產生中斷 TIM_ITConfig(TIM6,TIM_IT_Update,ENABLE); //開啟定時器更新中斷 hcsr04_NVIC(); TIM_Cmd(TIM6,DISABLE); } //tips:static函式的作用域僅限於定義它的原始檔內,所以不需要在標頭檔案裡宣告 static void OpenTimerForHc() //開啟定時器 { TIM_SetCounter(TIM6,0);//清除計數 msHcCount = 0; TIM_Cmd(TIM6, ENABLE); //使能TIMx外設 } static void CloseTimerForHc() //關閉定時器 { TIM_Cmd(TIM6, DISABLE); //使能TIMx外設 } //NVIC配置 void hcsr04_NVIC() { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitStructure.NVIC_IRQChannel = TIM6_IRQn; //選擇串列埠1中斷 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //搶佔式中斷優先順序設定為1 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //響應式中斷優先順序設定為1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中斷 NVIC_Init(&NVIC_InitStructure); } //定時器6中斷服務程式 void TIM6_IRQHandler(void) //TIM3中斷 { if (TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET) //檢查TIM3更新中斷髮生與否 { TIM_ClearITPendingBit(TIM6, TIM_IT_Update ); //清除TIMx更新中斷標誌 msHcCount++; } } //獲取定時器時間 u32 GetEchoTimer(void) { u32 t = 0; t = msHcCount*1000;//得到MS t += TIM_GetCounter(TIM6);//得到US TIM6->CNT = 0; //將TIM2計數暫存器的計數值清零 Delay_Ms(50); return t; } //一次獲取超聲波測距資料 兩次測距之間需要相隔一段時間,隔斷迴響訊號 //為了消除餘震的影響,取五次資料的平均值進行加權濾波。 float Hcsr04GetLength(void ) { u32 t = 0; int i = 0; float lengthTemp = 0; float sum = 0; while(i!=5) { TRIG_Send = 1; //傳送口高電平輸出 Delay_Us(20); TRIG_Send = 0; while(ECHO_Reci == 0); //等待接收口高電平輸出 OpenTimerForHc(); //開啟定時器 i = i + 1; while(ECHO_Reci == 1); CloseTimerForHc(); //關閉定時器 t = GetEchoTimer(); //獲取時間,解析度為1US lengthTemp = ((float)t/58.0);//cm sum = lengthTemp + sum ; } lengthTemp = sum/5.0; return lengthTemp; } /*::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: ** 函式名稱: Delay_Ms_Ms ** 功能描述: 延時1MS (可通過模擬來判斷他的準確度) ** 引數描述:time (ms) 注意time<65535 :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/ void Delay_Ms(uint16_t time) //延時函式 { uint16_t i,j; for(i=0;i<time;i++) for(j=0;j<10260;j++); } /*::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: ** 函式名稱: Delay_Ms_Us ** 功能描述: 延時1us (可通過模擬來判斷他的準確度) ** 引數描述:time (us) 注意time<65535 :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::*/ void Delay_Us(uint16_t time) //延時函式 { uint16_t i,j; for(i=0;i<time;i++) for(j=0;j<9;j++); }
但是關於USART的函式我就不往上寫了,這個簡單的串列埠列印大家應該都會寫。下面簡單貼一下我的主函式吧。
/*
教訓:實驗前一定要檢查引腳連線是否正確,萬不可搞錯,不然又要燒壞晶片!!!!
2017.6.8
*/
#include "hcsr04.h"
#include "chao_usart.h"
int main()
{
float length;
GPIO_cfg();
NVIC_cfg();
USART_cfg();
printf("串列埠初始化成功!\n");
Hcsr04Init();
printf("超聲波初始化成功!\n");//測試程式是否卡在下面兩句上面
length = Hcsr04GetLength();
printf("距離為:%.3f\n",length);
}
實驗結果: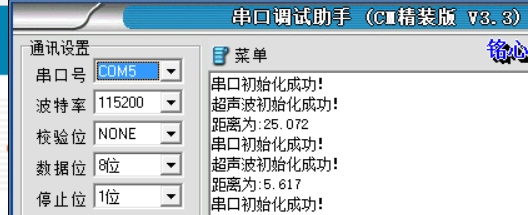
好了,其實這個模組很簡單,但是要是把他用的很好的話還是比較困難的,比如用超聲波做一個四軸定高的程式,還是有一定的挑戰性的。
寫這篇部落格的目的不僅僅是介紹這個模組的使用,其實這種使用介紹網上一搜一大把,我只是想紀錄一下,我在做這個模組的時候遇到的一些其他的問題。
其中有一個小插曲,就是當吧寫好的程式燒進去之後,執行時總是出現每次返回一個同樣的比正常值小的多的資料,比如說0.034cm,這明顯是一個錯誤的資料,但是剛開始的時候,不知道為什麼
總是這樣,多次復位從新上電總是這一個資料。讓我很是苦惱。但是幸運的是,在這樣的情況中間,他又會有時出現一兩個正常的的資料,讓你有點摸不著頭腦。
上網查了一下才慢慢明白,這種現象叫做“餘震”,網上關於餘震的解釋大致有三種:
1、探頭的餘震。即使是分體式的,發射頭工作完後還會繼續震一會,這是物理效應,也就是餘震。這個餘震訊號也會向外傳播。如果你的設計是發射完畢後立刻切換為接收狀態(無盲區),那麼這個餘震波會通過殼體和周圍的空氣,直接到達接收頭、干擾了檢測(注:通常的測距設計裡,發射頭和接收頭的距離很近,在這麼短的距離裡超聲波的檢測角度是很大的,可達180度)。
2、殼體的餘震。就像敲鐘一樣,能量仍來自發射頭。發射結束後,殼體的餘震會直接傳導到接收頭,當然這個時間很短,但已形成了干擾。另外,在不同的環境溫度下,殼體的硬度和外形會有所變化,其餘震有時長、有時短、有時干擾大、有時干擾小,這是設計工業級產品時必須要考慮的問題。
3、電路串擾。超聲波發射時的瞬間電流很大,例如某種工業級連續測距產品瞬間電流會有15A,通常的產品也能達到1A,瞬間這麼大的電流會對電源有一定影響,並干擾接收電路。通過改善電源設計可以緩解這種情況,但在低成本設計中很難根除。所以每次發射完畢,接收電路還需要一段時間穩定工作狀態。在此期間,其輸出的訊號很難使用。
消除上述現象的方法之一就是在檢測的時候多次迴圈檢測,取平均值,也就是加權平均濾波,一個簡單的濾波處理。就是下面這一段:
u32 t = 0;
int i = 0;
float lengthTemp = 0;
float sum = 0;
while(i!=5)
{
TRIG_Send = 1; //傳送口高電平輸出
Delay_Us(20);
TRIG_Send = 0;
while(ECHO_Reci == 0); //等待接收口高電平輸出
OpenTimerForHc(); //開啟定時器
i = i + 1;
while(ECHO_Reci == 1);
CloseTimerForHc(); //關閉定時器
t = GetEchoTimer(); //獲取時間,解析度為1US
lengthTemp = ((float)t/58.0);//cm
sum = lengthTemp + sum ;
}
lengthTemp = sum/5.0;
return lengthTemp;加了這個之後,基本上就沒有出現餘震現象了。
還有一點就是測試程式前一定要檢查引腳有沒有接錯,不管多有把握,也要看一遍,不然很容易出大事的,一個晶片也許就因為你的大意給GG了。切記,這個應該也算我們這個行業的基本素養吧。