
映象矩陣(Reflection)
映象(反射)矩陣是n維空間中的沿n-1維平面的一種矩陣變換,常見的應用場景是在2維空間影象處理、3維空間物體場景變換。先直觀看看映象變換的效果:

直觀的感受了映象變換的效果之後,接下來我們看看這個變換的數學表示式是什麼樣的。首先n維度空間的映象變換是基於某個n-1維度平面(對於2維度就是某條直線)來說的,線性代數的知識知道n維空間的n-1維平面存在法向量,假設是要做映象平面的單位法向量,單位法向量||u||=1,定義映象矩陣
。
1. Q是對稱和標準正交的,
由Q的矩陣展開形式,很明顯看到,所以Q是對稱的。標準正交:
是Q的兩列,由標準正交的定義,需要滿足如下條件:
2.,這條性質反應了映象的特點,映象兩次等於原空間。
上面是映象矩陣的定義和它的一些性質和推導,那麼我們再做一點深層次的思考:為什麼映象的表達會是一個矩陣變換,如果我做旋轉是不是也是一個矩陣變換?首先,問題2的答案:YES,2維空間的旋轉的變換矩陣是:
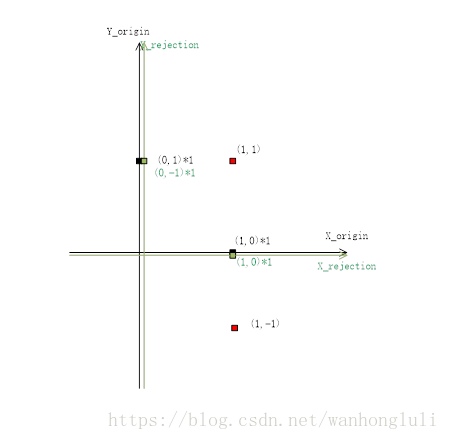
對於問題1,矩陣變換的本質可以理解成座標系的變換,對於映象和旋轉我們都是對原座標系中的向量(座標系中的點可以表示成原點指向該點的向量)用新的座標系中的基進行了表示。比如二維直角座標系x0y的座標基向量是(1,0)和(0,1),如果用矩陣表示:,基向量就是矩陣的列向量,(1,1)點這個座標系下的座標(x,y)由方程組
求得(x,y)=(1,1)因為在原座標系下,假設我們對(1,1)點做沿x軸做映象,這裡的映象很簡單,x軸和原座標系相同,y軸與原座標系反號,所以映象之後新的座標系基向量是(1,0)和(0,-1)(如果你通過上面的映象公式可以求得同樣的答案,u=(0,1)),新的座標系的矩陣表示
最後我們說說2維度空間和3維空間的映象矩陣的表示式,首先是2維空間,對於2-D空間的某個條直線做映象,假設該直線的單位法向量u(x,y),由計算得到2-D空間的映象矩陣:
對於3-D空間的某平面做映象: