
(二)深入梯度下降(Gradient Descent)演算法
一直以來都以為自己對一些演算法已經理解了,直到最近才發現,梯度下降都理解的不好。
1 問題的引出
對於上篇中講到的線性迴歸,先化一個為一個特徵θ1,θ0為偏置項,最後列出的誤差函式如下圖所示:
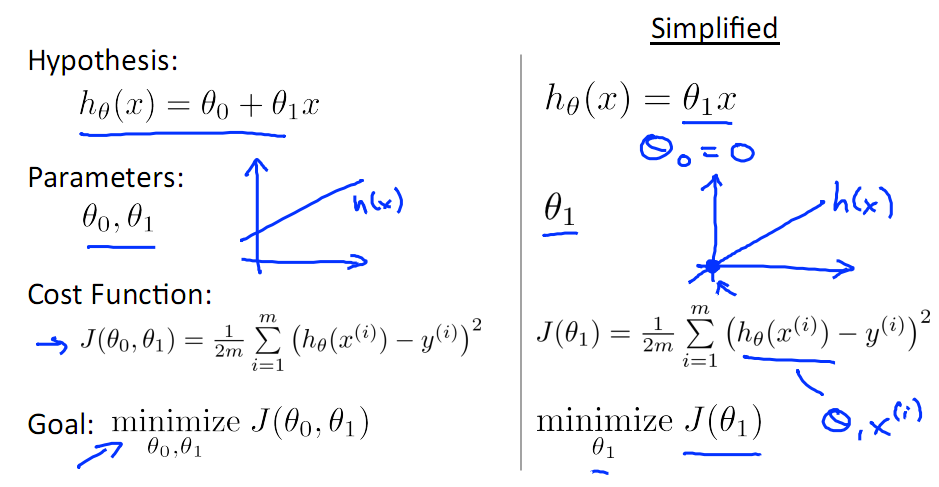
手動求解
目標是優化J(θ1),得到其最小化,下圖中的×為y(i),下面給出TrainSet,{(1,1),(2,2),(3,3)}通過手動尋找來找到最優解,由圖可見當θ1取1時,![]() 與y(i)完全重合,J(θ1) = 0
與y(i)完全重合,J(θ1) = 0
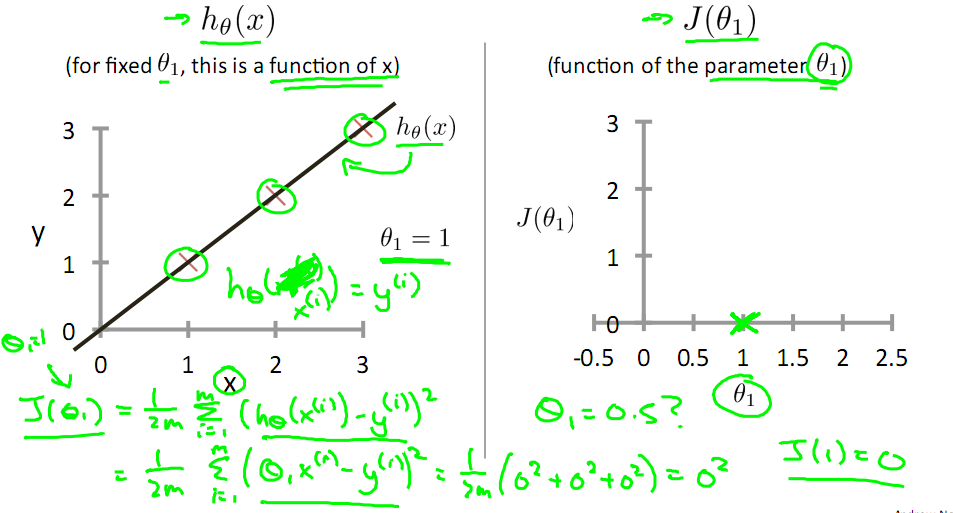
下面是θ1的取值與對應的J(θ1)變化情況
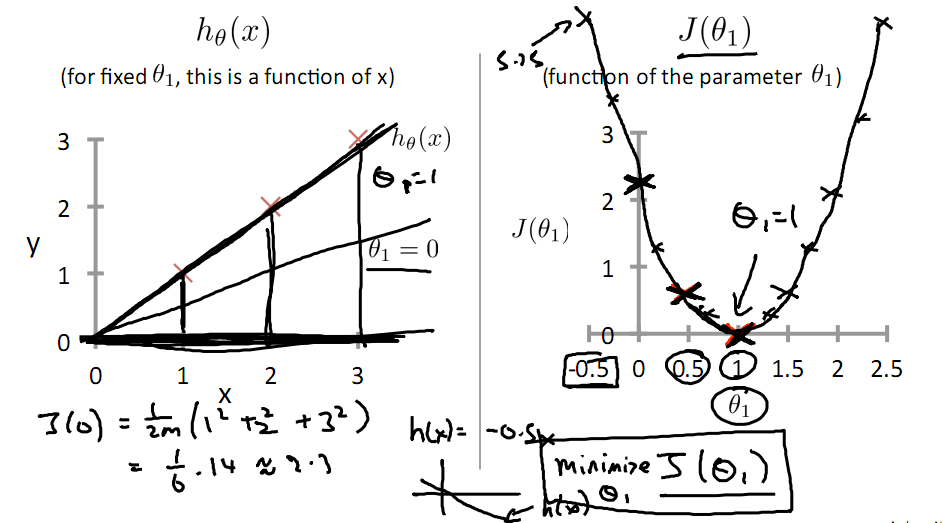
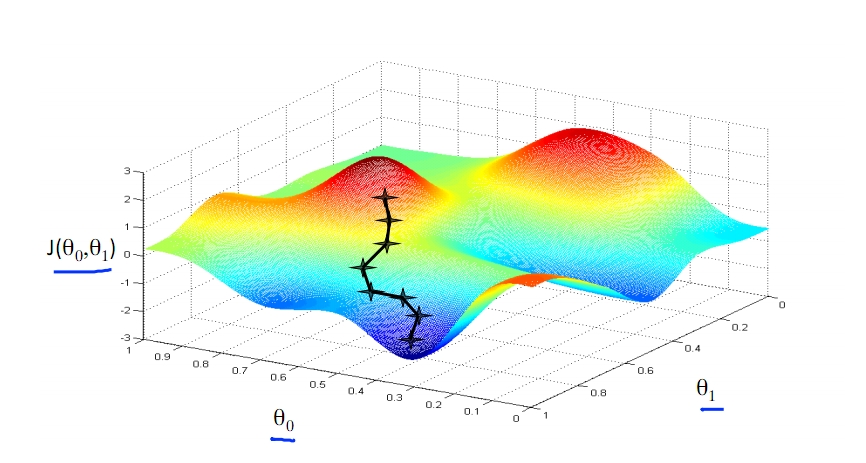
由此可見,最優解即為0,現在來看通過梯度下降法來自動找到最優解,對於上述待優化問題,下圖給出其三維影象,可見要找到最優解,就要不斷向下探索,使得J(θ)最小即可。
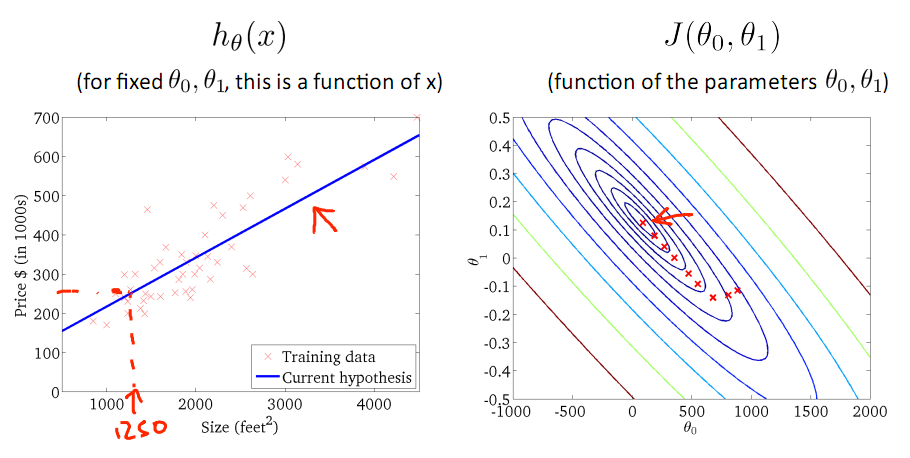
2 梯度下降的幾何形式
下圖為梯度下降的目的,找到J(θ)的最小值。
其實,J(θ)的真正圖形是類似下面這樣的,因為其是一個凸函式,只有一個全域性最優解,所以不必擔心像上圖一樣找到區域性最優解

直到了要找到圖形中的最小值之後,下面介紹自動求解最小值的辦法,這就是梯度下降法
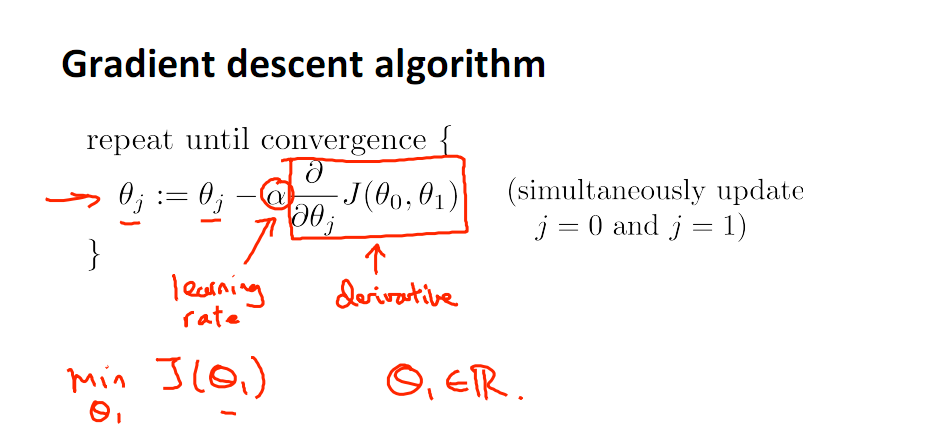
對引數向量θ中的每個分量θj,迭代減去速率因子a* (dJ(θ)/dθj)即可,後邊一項為J(θ)關於θj的偏導數
3 梯度下降的原理
導數的概念

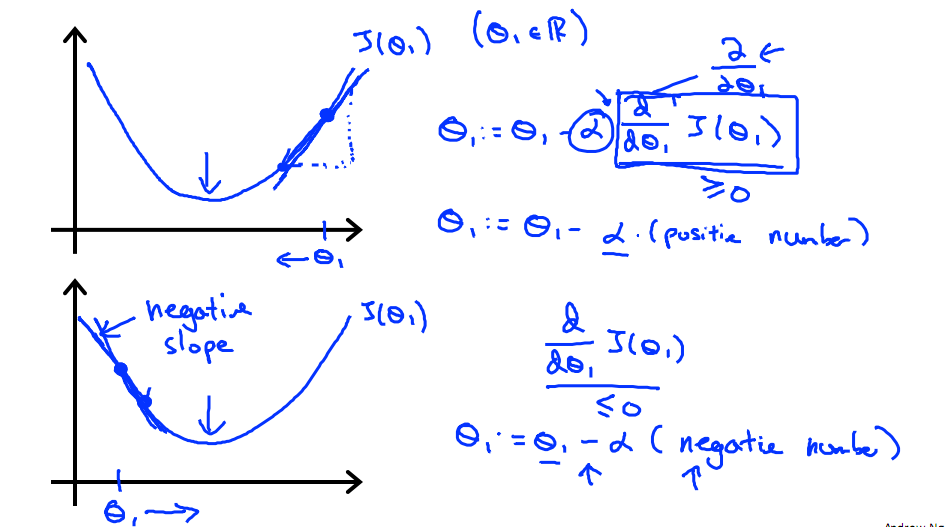
由公式可見,對點x0的導數反映了函式在點x0處的瞬時變化速率,或者叫在點x0處的斜度。推廣到多維函式中,就有了梯度的概念,梯度是一個向量組合,反映了多維圖形中變化速率最快的方向。
下圖展示了對單個特徵θ1的直觀圖形,起始時導數為正,θ1減小後並以新的θ1為基點重新求導,一直迭代就會找到最小的θ1,若導數為負時,θ1的就會不斷增到,直到找到使損失函式最小的值。
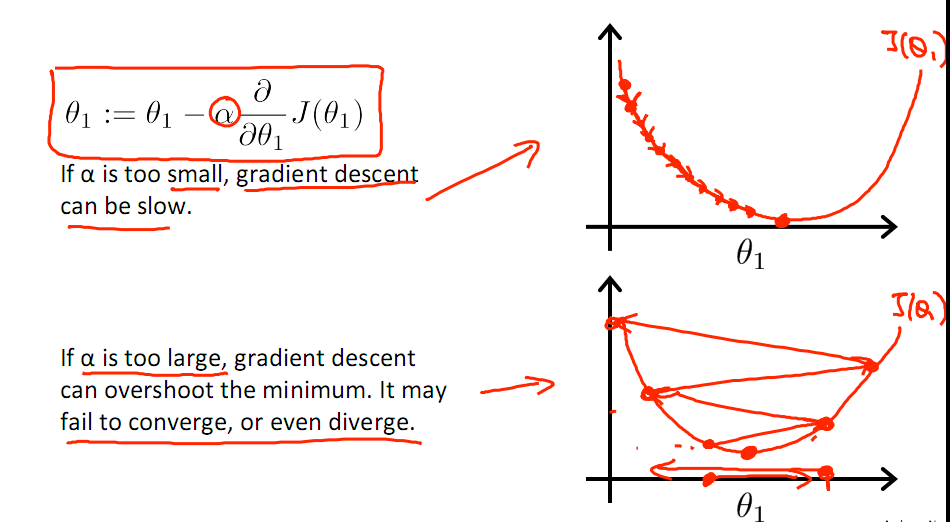
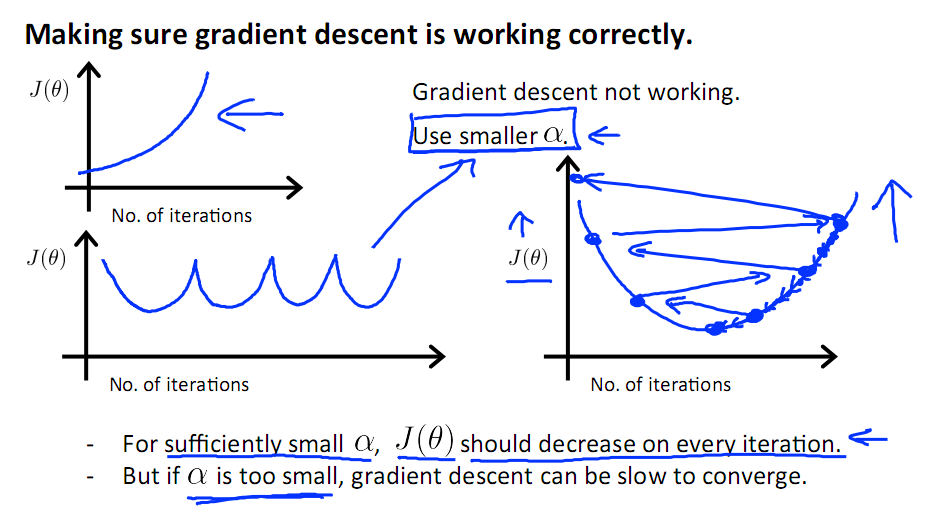
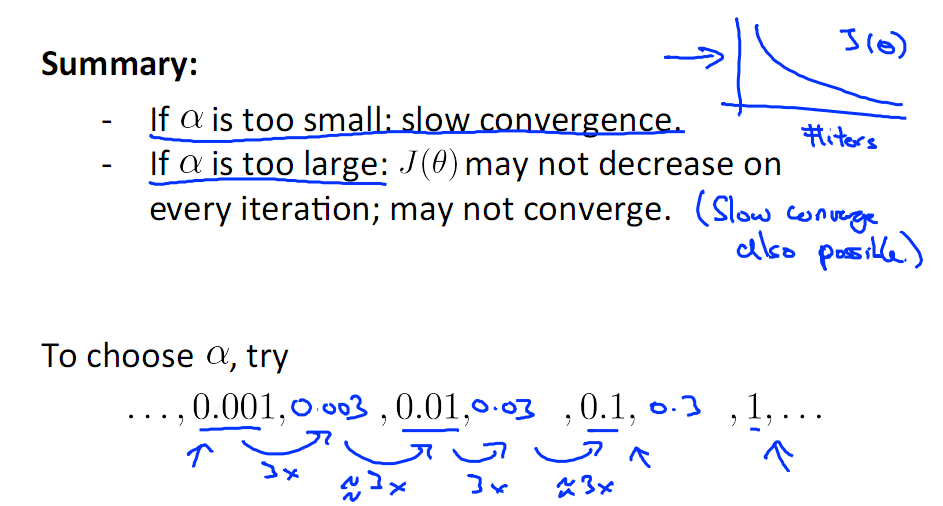
有一點需要注意的是步長a的大小,如果a太小,則會迭代很多次才找到最優解,若a太大,可能跳過最優,從而找不到最優解。
另外,在不斷迭代的過程中,梯度值會不斷變小,所以θ1的變化速度也會越來越慢,所以不需要使速率a的值越來越小
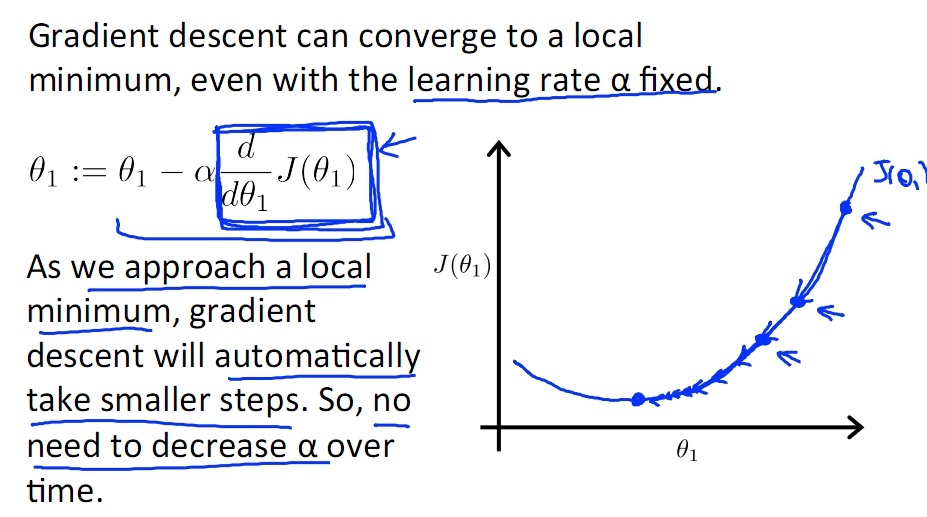
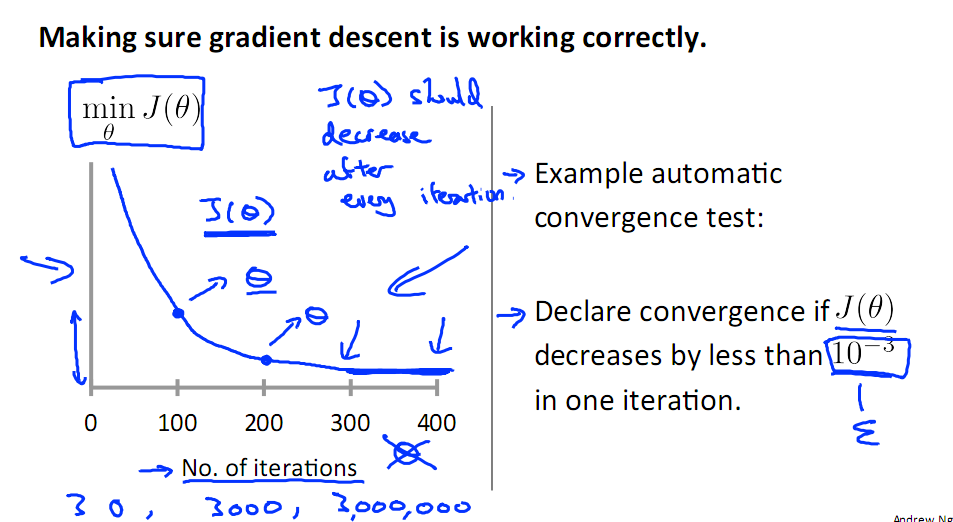
下圖就是尋找過程
當梯度下降到一定數值後,每次迭代的變化很小,這時可以設定一個閾值,只要變化小魚該閾值,就停止迭代,而得到的結果也近似於最優解。
若損失函式的值不斷變大,則有可能是步長速率a太大,導致演算法不收斂,這時可適當調整a值
為了選擇引數a,就需要不斷測試,因為a太大太小都不太好。
如果想跳過的a與演算法複雜的迭代,可以選擇 Normal Equation。
4 隨機梯度下降
對於樣本數量額非常之多的情況,Batch Gradient Descent演算法會非常耗時,因為每次迭代都要便利所有樣本,可選用Stochastic Gradient Descent 演算法,需要注意外層迴圈Loop,因為只遍歷一次樣本,不見得會收斂。

隨機梯度演算法就可以用作線上學習了,但是注意隨機梯度的結果並非完全收斂,而是在收斂結果處波動的,可能由非線性可分的樣本引起來的:
可以有如下解決辦法:(來自MLIA)
1. 動態更改學習速率a的大小,可以增大或者減小
2. 隨機選樣本進行學習