
360度鐳射雷達測距模組 掃地機器360度掃描 turtlebot3雷達模組
阿新 • • 發佈:2018-12-15
拆機日本日立和韓國LG合資產360度鐳射雷達,新款,體積小巧,這款雷達還在turtlebot3小車平臺上也在用,雷達都是17年新款測試機拆解出來的,數量不多,成色都很好,個別有的鐳射視窗都還有貼膜,帶線插頭雷達全部測試好發貨。
剪線的雷達測試麻煩都沒有測試就便宜處理了。
這批貨還有挑出來幾十個有剪線的,這種特價90元一個特價處理,成色都是非常好的。
網友反饋雷達接線定義:
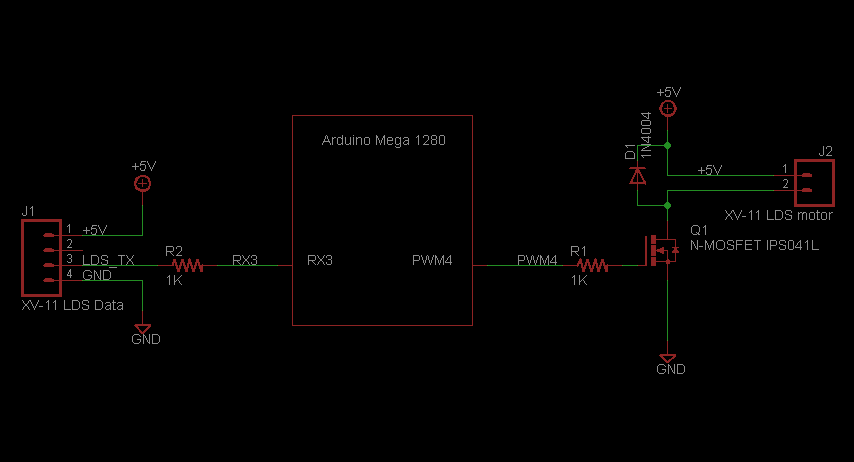
6P插口橙色的線必須和電機2P插口的黑色線接在一起,電機2P紅線接5V。然後串列埠線接6P插口的紅接5V,黑接負極,綠色接txd,棕色接RXD,波特率230400,通上電,在串列埠除錯工具裡面傳送一個 b ,雷達就會開始旋轉,等他穩定了,就會開始返回資料,要停止的話就傳送 e。
具體瞭解資料可以查詢ROS官網,店主程式也是菜鳥。需要雷達PDF圖紙,測試程式,解碼檔案,還有12G的ROS開發教學資料,需要資料可以聯絡店主,都是網友貢獻的。
雷達重110克,帶底座130克。

















360鐳射雷達介紹
鐳射雷達在ROS下測試
機器人專案
以下連結包含有關基本效能,測量效能,機制佈局,光路,資料資訊,引腳說明和命令的資訊。
這是詳細規範文件:PDF




Neato真空吸塵器的鐳射雷達由模糊邏輯控制
這款鐳射雷達的優勢在於它很小(即:不太大),並且很容易與arduino卡(MEGA 1280)連線,這要歸功於Xevel編寫的驅動程式。
(請參閱:您將在以下地址找到
來源: https://github.com/Xevel/NXV11
文件:https://github.com/Xevel/NXV11/wiki


Turtlebot3-burger入門教程-軟體清單