
Lecture 3:Planning by Dynamic Programming -By David Silver
Dynamic :我們認為問題是擁有某種時間或者順序方面的特性。
Programming:這裡我們討論的是數學規劃,就像是線性規劃,或者是二次規劃。
動態規劃能夠幫助我們解決一些複雜的問題,就是將複雜的問題分解成子問題,然後去解決這些子問題,將這些子問題的答案結合起來,最終得到原問題的答案。
使用動態規劃的方法需要滿足兩個特性:
1.最優結構:最優化原理,說的是我們可以將某些整體性問題,分解成兩個或者多個的子問題,子問題的最優解也就是整體的最優解。簡要來說就是整個優化問題可以分解為多個子優化問題。
2.重複的問題:子問題是重複的,這樣我們就可以不斷重複獲得子優化問題的解,使得我們可以將子優化問題的解重複利用。
馬爾可夫決策過程是滿足動態規劃的兩個條件的,除此之外,馬爾可夫決策過程也滿足貝爾曼方程。貝爾曼方程就是遞迴組合,其中我們將最優值函式拆分兩部分,第一步是最優行為,以及在此之後的最優行為。你可以理解為目前的一步行動是最好的,餘下的其它步驟也將採取最優的行動,這些就組成了整體的最優值。
我們可以認為Value function就是快取目前我們所找到MDP的最優值資訊。通過value function 我們可以找到從任一狀態出發的解決方案。通過value function函式,我們可以找到最優的行動方式。並以那個狀態為起點,得到最大獎勵。一旦你得到了最優獎勵,就可以進行回溯。
這裡我們說兩個特殊案例的解決方案:

預測問題:
這個問題就是我們知道了一個標準的MDP,我們同時也知道了Policy。我想知道我將會得到多少獎勵?針對這個問題,我們需要求解的就是value function,通過value function,我們就可以得到我們能獲得的最大獎勵是多少。實際上這也是policy評估,通過他我們能知道policy的效果如何。
控制問題:
在這個問題中我們也是知道了MDP的所有資訊,像Atari遊戲,我們需要知道遊戲內部所有的資料,每一步將要產生的資料我們都知道,我們現在想做的就是控制這個遊戲,但是我們並不知道policy。我們想知道的是最好的策略是什麼?我們想要知道在所有的策略中我們選擇哪一個才能得到最多的獎勵。也就是找一個最好的狀態到動作的對映。
Policy Evaluation

上節課我們是得到了狀態值函的計算公式,狀態s處的值函是是可以利用後繼的值函式V(s')來表示的。通過高斯-賽德爾迭代演算法,我們就可以對其進行求解,結果如上圖中的公式所示。上面這個方程代表的是值函式的期望形式。
向前看一步,我們向前看的是下一個狀態的值。採用貝爾曼方程,每當我們向前看一步,那麼我們就得到了下個狀態的值,我們所有可能採取的動作都考慮進去,得到接下來的狀態,我們考慮這些連續狀態的value,在得到下個時刻每一個狀態的概率之後,我們將其備份,這樣我們就知道了路徑上的value值和其對應概率了。
之後的話我們就可以對其進行計算代。我們在葉節點儲存我們先前的迭代value。以便我們求得下一次迭代的value,也就是我們想要得到value函式。我們需要最近一次迭代k,將k迭代產生的值帶入方程中,得到葉節點的值。通過這些值,我們就能計算出下一次迭代所產生的一個新的value。我們對每個狀態都做上述操作,我們就可以將所有狀態進行更新求解。
下面舉個例子說明一下:
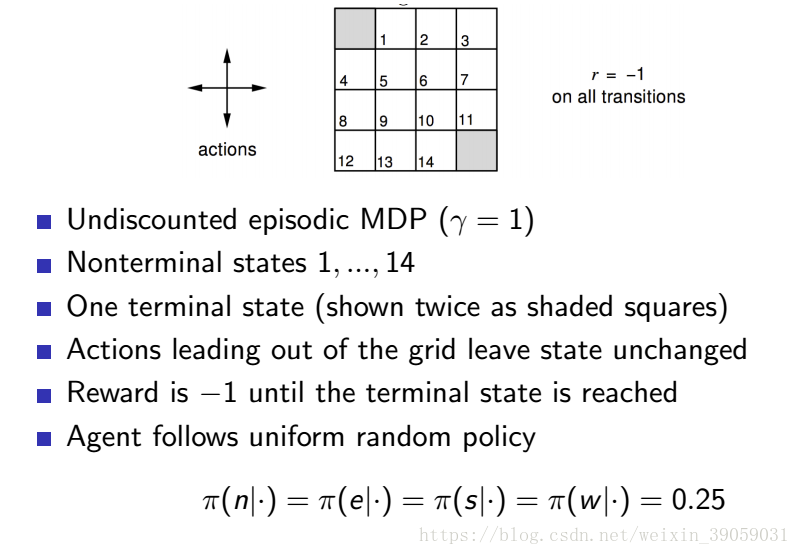
上圖是遊戲的機制:我們對其迭代求解有:
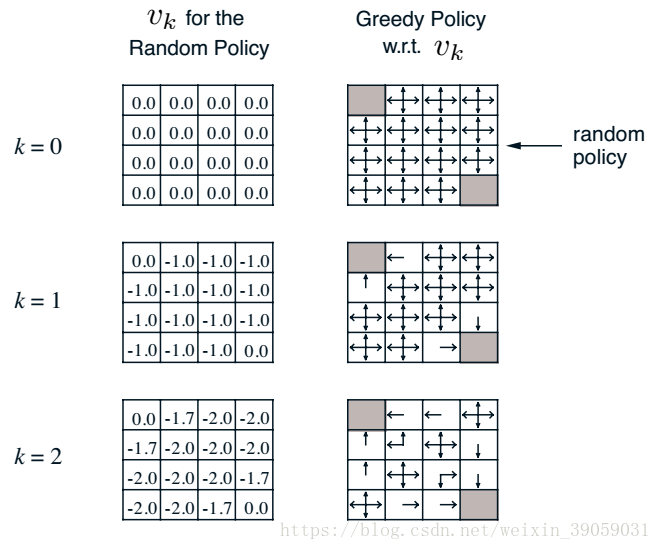

漸漸地,我們發現值函式最終會收斂,也就是當我們策略隨機的時候,我們最終到達終點的步長將會是20左右。右側的表格就是我們在知道value 函式之後構建的新的policy。如果我們忽略右側的表格,我們可以通過這種策略迭代的方法知道目前我所使用的policy的value。這種方法實際上就是在迭代貝爾曼方程。
Policy Iteration
之前我們採取Policy Evaluation的方法能夠去評估一個policy。現在我們想要在MDP過程中,尋找一個儘可能好的policy。我們想通過反饋的方式來將其實現。假設某人已近給了你一個policy,你怎麼樣才能返回一個policy,確保這個policy比原來那個要好。
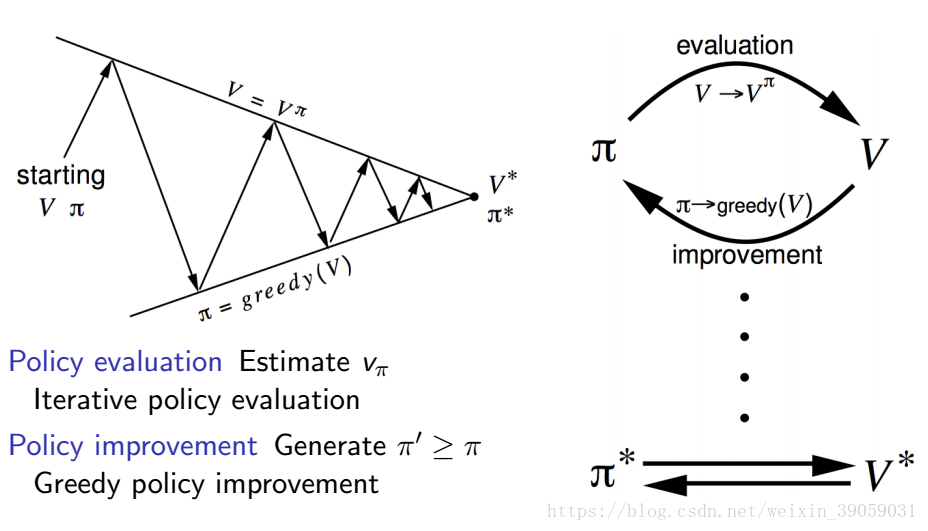
我們將這個過程分成兩部分,第一部分我們將評估這個給定policy的value函式,就像我們在上面policy evaluatioin說的那樣,給定一個隨機策略,然後更新我們的value函式。第二部分我們依據value函式來改進我們的策略,這裡大多數是採用貪心演算法(大部分動作的選擇採取值函式最大的那一個,小部分採取隨機選擇)。我們通過第一部分->第二部分->第一部分····這樣迭代之後,我們就將會尋找到一個最優的策略。
上面的問題概括起來的話就是下面這張圖片:

那麼我們現在就推到一下整個策略迭代將會收斂,如下圖所示:
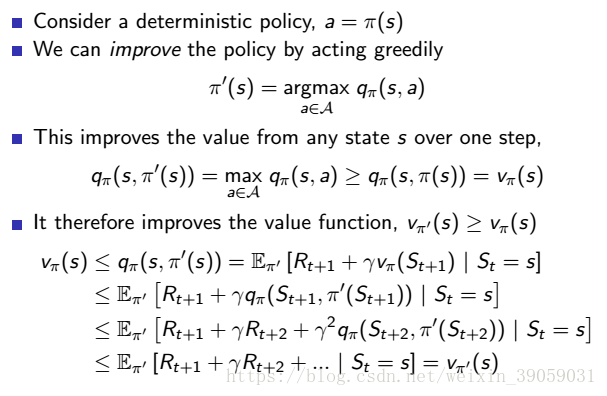
我們採用貪婪策略,每次都選取能獲得最大價值的那個動作,那麼我們得到的獎勵至少是和之前的獎勵一樣大的。通過這樣的一次一次迭代之後,我們將會得到一個最優解。
Value Iteration
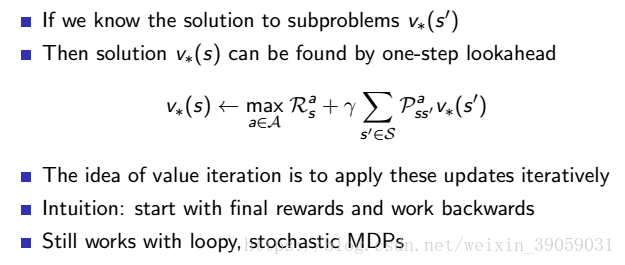
和策略迭代一樣,值函是迭代也是通過回溯的方式來更新整個值函式的。和policy iteration不同的是,我們每一步並不會使用一個已近確定下來的policy,我們只會直接作用於value空間。只有value函式的迭代。
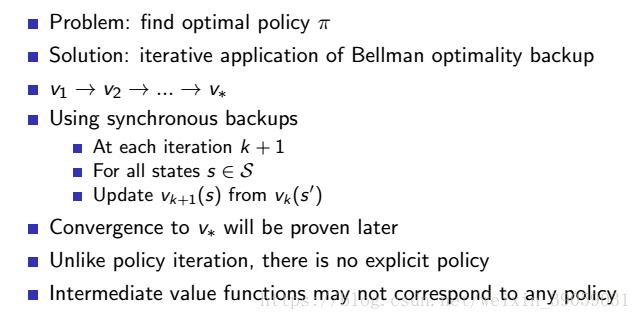
演算法的更新過程如下圖所示:

其實跟策略迭代沒啥多大區別,一個是把動作加進去取max,一個是還沒有加動作取max。