
影象處理基礎(2)
- 影象的基本運算 影象的基本運算分為點運算、代數運算、邏輯運算和幾何運算。 1.點運算 1.1 g(x,y)=T[f(x,y)] f(x,y):輸入影象的灰度。 g(x,y):輸出影象的灰度。T[ ]:灰度變換函式。點運算是一種畫素的逐點運算 灰度變換函式可化簡為s=T[r] ,點運算可以改變影象資料所佔據的灰度值範圍,從而改善影象顯示效果。 1.2點運算分類 按灰度變換函式的性質可分為:灰度變換增強和直方圖增強。 灰度變換增強分為:線性點運算、分段線性點運算、非線性點運算 (1)s=ar+b 線性點運算 a=1,b=0 輸出灰度不變 0<a<1,b>0 輸出灰度壓縮 a>1,b=0 輸出灰度擴充套件整體變亮 0<a<1,b=0輸出灰度壓縮整體變暗 a<0 亮區域變暗,暗區域變亮 (2)分段線性點運算 將感興趣的灰度範圍線性擴充套件,相對抑制不感興趣的灰度區域。 例:閾值化:設閾值為m,r<m s=0 ,r>m s=1 (3)非線性點運算 s=ln(1+r) 低灰度區擴充套件,高灰度區壓縮。 s=cr^y 0<y<1 加亮減暗 y>1 加暗減亮 直方圖增強: (1)直方圖性質 所有的空間資訊全部丟失。 每一灰度值對應的畫素個可直接得到。 任何一幅影象,具有唯一對應的直方圖、但任何一個直方圖,可能對應多幅影象 一幅影象各子區的直方圖之和等於該全圖的直方圖 (2)直方圖灰度分佈情況: 大多數畫素灰度取值在低端,影象肯定較暗;一般在攝影中曝光太弱將導致這種結果 影象的畫素灰度值集中在亮區,影象將偏亮;在攝影過程中曝光過強就會造成這種結果 影象的畫素值集中在中部,影象的動態範圍太小整體影象的對比度較弱,影響細節的分辨 影象的畫素值分佈未佔滿可用灰度級區間,影象的動態範圍偏小,影象的細節保留不充分 影象的畫素值分佈超過可用灰度級區間,影象的動態範圍偏大,將丟失較亮與較暗的影象細節 一幅好的影象應合理利用全部的灰度級。 (3)直方圖增強方法 a)直方圖均勻化 從人眼視覺特性來考慮,一帽影象的直方圖如果是均勻分佈的,該影象色調給人的感覺比較協調。因此將原影象直方圖通過T(r)調整為均勻分佈的直方圖,這樣修正後的影象能滿足人眼視覺要求。 直方圖均衡化過程(演算法): (1)列出原始圖灰度級r,並歸一化; (2)統計原始直方圖各灰度級畫素數nk; (3)計算原始直方圖各概率:pk=nk/N; (4)計算累計直方圖:sk=Σpk (5)對sk四捨五入處理; (6)確定對映對應關係:rk→sk; (7)統計新直方圖各灰度級畫素nk’; (8)用pk(sk)=nk’/N計算新直方圖。 b) 直方圖規定化 直方圖規定化是使原圖橡灰度直方圖變成規定形狀的直方圖而對影象作修正的增強方法。但利用直方圖規定化方法進行影象增強的主要困難在於要構成有意義的直方圖。 2.代數運算 代數運算是指兩幅或多幅輸入影象之間進行點對點的加、減、乘、除運算得到輸出影象的過程。 (1)加法運算:生成影象疊加效果,去除“疊加性”隨機噪音。 生成影象疊加效果對於兩個影象f(x,y)和h(x,y)的均值有: g(x,y)=1/2f(x,y)+1/2h(x,y)推廣這個公式為: g(x,y)=af(x)+β(x,y)其中a+β=1,可以得到各種影象合成的效果,也知以用於兩張圖片的銜接。 (2)去除疊加性隨機噪音
 利用同一景物的多幅影象取平均、消除噪聲。取M個影象相加求平均得到1幅新影象,一般選8幅取平均。
(2)減法運算:將同一景物在不同時間拍攝的圖橡或同一景物在不同波段的影象相減,這就是影象的減法運算。實際中常稱為差影法。
C(x,y)=A(x,y)-B(x,y)差值影象提供了影象間的差值資訊,用於指導動態監測、運動目標的檢測和跟蹤、影象背景的消除及目標識別等。
主要應用舉例:
差影法(檢測同一場景兩幅影象之間的變化)混合影象的分離
(3)乘法運算:例如:用於影象的區域性顯示,用二值蒙板影象與原影象做乘法改變影象的灰度級。
(4)除法運算:除法運算可用於校正成像裝置的非線性影響,這在特殊形態的影象(如斷層掃描等醫學影象)處理經常用到。
影象除法也可以用來檢測兩幅圖橡間的區別,但是除法操作給出的是相應畫素值的變化比率,而不是每個畫素的絕對差異,因而影象除法操作也稱為比率變換。
3.邏輯運算
邏輯運算是指將兩幅或多幅影象通過對應畫素之間的與、或、非邏輯運算得到輸出影象的方法。在進行影象理解與分析領域比較有用。運用這種方法可以為影象提供模板,與其他運算方法結合起來可以獲得某種特殊的效果。
4.幾何運算
幾何運算就是改變影象中物體物件(畫素)之間的空間關係。
從變換性質來分,幾何變換可以分為影象的位置變換(平移、映象、旋轉)、形狀變換(放大、縮小)以及影象的複合變換等。
齊次座標:齊次座標的幾何意義相當於點(x,y)落在3D空間H=1的平面上,將XOY平面內的三角形abc的各頂點表示成齊次座標(x,y,1)的形式。
(1)影象的平移
(x0,y0)—>(x1,y1)
利用同一景物的多幅影象取平均、消除噪聲。取M個影象相加求平均得到1幅新影象,一般選8幅取平均。
(2)減法運算:將同一景物在不同時間拍攝的圖橡或同一景物在不同波段的影象相減,這就是影象的減法運算。實際中常稱為差影法。
C(x,y)=A(x,y)-B(x,y)差值影象提供了影象間的差值資訊,用於指導動態監測、運動目標的檢測和跟蹤、影象背景的消除及目標識別等。
主要應用舉例:
差影法(檢測同一場景兩幅影象之間的變化)混合影象的分離
(3)乘法運算:例如:用於影象的區域性顯示,用二值蒙板影象與原影象做乘法改變影象的灰度級。
(4)除法運算:除法運算可用於校正成像裝置的非線性影響,這在特殊形態的影象(如斷層掃描等醫學影象)處理經常用到。
影象除法也可以用來檢測兩幅圖橡間的區別,但是除法操作給出的是相應畫素值的變化比率,而不是每個畫素的絕對差異,因而影象除法操作也稱為比率變換。
3.邏輯運算
邏輯運算是指將兩幅或多幅影象通過對應畫素之間的與、或、非邏輯運算得到輸出影象的方法。在進行影象理解與分析領域比較有用。運用這種方法可以為影象提供模板,與其他運算方法結合起來可以獲得某種特殊的效果。
4.幾何運算
幾何運算就是改變影象中物體物件(畫素)之間的空間關係。
從變換性質來分,幾何變換可以分為影象的位置變換(平移、映象、旋轉)、形狀變換(放大、縮小)以及影象的複合變換等。
齊次座標:齊次座標的幾何意義相當於點(x,y)落在3D空間H=1的平面上,將XOY平面內的三角形abc的各頂點表示成齊次座標(x,y,1)的形式。
(1)影象的平移
(x0,y0)—>(x1,y1)

 垂直映象
垂直映象
 (2)影象的旋轉
一般影象的旋轉是以影象的中心為原點,旋轉一定的角度,即將影象上的所有畫素都旋轉一個相同的角度。
(2)影象的旋轉
一般影象的旋轉是以影象的中心為原點,旋轉一定的角度,即將影象上的所有畫素都旋轉一個相同的角度。

 以原始影象的點(1,1)為例,旋轉以後45度後均為小數,經舍入後為(1,0),產生了位置誤差。因此,影象旋轉之後,可能會出級一些空白點,需要對這些空白點進行灰度級的插值處理,否則影響旋轉後的影象質量。
(3)影象的縮放
以原始影象的點(1,1)為例,旋轉以後45度後均為小數,經舍入後為(1,0),產生了位置誤差。因此,影象旋轉之後,可能會出級一些空白點,需要對這些空白點進行灰度級的插值處理,否則影響旋轉後的影象質量。
(3)影象的縮放
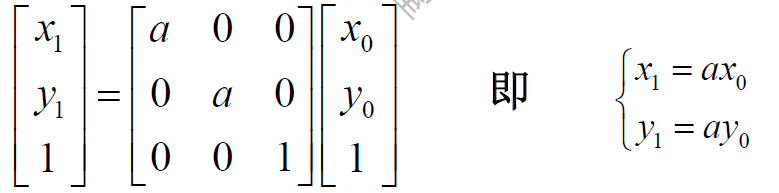 縮小
以a=1/2為例,即影象被縮小為原始影象的一半。影象被縮小一半以後根據目標影象和原始影象畫素之間的關係,有如下兩種縮小方法。
第一種方法是取原影象的偶數行列組成新影象;
另一種方法是取原影象的奇數行列維成新影象。
放大
在影象放大的正變換中,出現了很多的空格。因此,需要對放大後所多出來的一些空格填入適當的畫素值。一般採用最鄰近插值和線性插值法。
(1)最鄰近插值
這是最簡單的一種插值方法,不需要計算,在待求畫素的四鄰象素中,將距離待求畫素最近的鄰畫素灰度賦給待求畫素。最鄰近演算法計算量較小,但可能會造成插值生成的影象灰度上的不連續;灰度變化的地方可能出現明顯的鋸齒狀。
(2)雙線性內插值(具有低通濾波性質,使高頻分量受損,影象輪廓可能會有一點模糊,且計算量大。)
線性插值擴充套件,其核心思想是在兩個向分別進行一次線性插值,影象上雙線性插值考慮待插畫素最近的2×2已知畫素點。需要加權四個畫素值來求得最終的畫素值。這使得插值出來比最鄰近插值平滑。
縮小
以a=1/2為例,即影象被縮小為原始影象的一半。影象被縮小一半以後根據目標影象和原始影象畫素之間的關係,有如下兩種縮小方法。
第一種方法是取原影象的偶數行列組成新影象;
另一種方法是取原影象的奇數行列維成新影象。
放大
在影象放大的正變換中,出現了很多的空格。因此,需要對放大後所多出來的一些空格填入適當的畫素值。一般採用最鄰近插值和線性插值法。
(1)最鄰近插值
這是最簡單的一種插值方法,不需要計算,在待求畫素的四鄰象素中,將距離待求畫素最近的鄰畫素灰度賦給待求畫素。最鄰近演算法計算量較小,但可能會造成插值生成的影象灰度上的不連續;灰度變化的地方可能出現明顯的鋸齒狀。
(2)雙線性內插值(具有低通濾波性質,使高頻分量受損,影象輪廓可能會有一點模糊,且計算量大。)
線性插值擴充套件,其核心思想是在兩個向分別進行一次線性插值,影象上雙線性插值考慮待插畫素最近的2×2已知畫素點。需要加權四個畫素值來求得最終的畫素值。這使得插值出來比最鄰近插值平滑。