
加速度計
加速度計原理:
加速度感測器實際上是用MEMS技術檢測慣性力造成的微小形變,把加速度感測器水平靜止放在桌子上,它的Z軸輸出的是1g的加速度。因為它Z軸方向被重力向下拉出了一個形變。可惜的是,加速度感測器不會區分重力加速度與外力加速度。所以,當系統在三維空間做變速運動時,它的輸出就不正確了,或者說它的輸出不能表明物體的姿態和運動狀態。
加速度感測器有什麼用?
加速度計,可以測量加速度,包括重力加速度,於是在靜止或勻速運動


規範化四元數作用:
表徵旋轉的四元數應該是規範化的四元數,但是由於計算誤差等因素,計算過程中四元數會逐漸失去規範化特性,因此必須對四元數做規範化處理。
由於誤差的引入,使得計算的變換四元數的模不再等於1,變換四元數失去規範性,因此再次更新四元數後,需要對四元數做規範化處理。
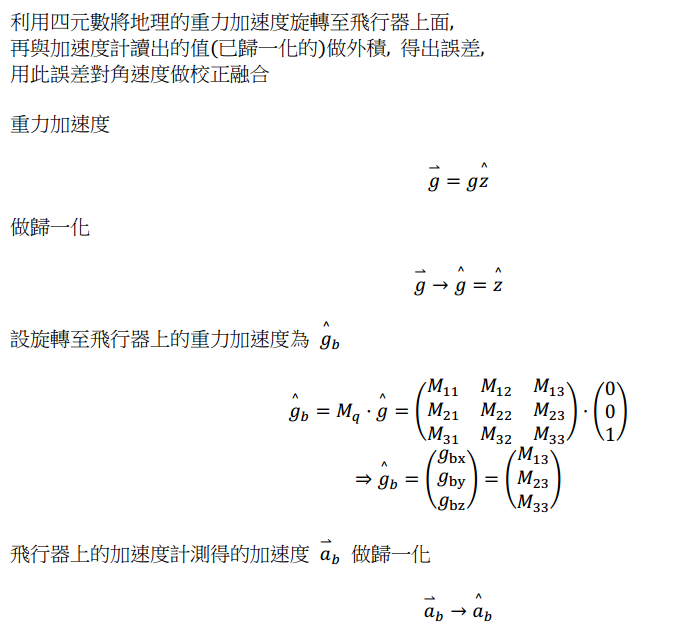
重力加速度歸一化:把加速度計的三維向量轉換為單位向量, 因為是單位向量到參考軸的投影,所以要把加速度計資料單位化,其實歸一化改變的只是這三個向量的長度,也就是隻改變了相同的倍數,方向並沒有改變,也是為了與單位四元數對應。
將當前姿態的重力在三個軸上的分量分離出來,把四元數換算成方向餘弦中的第三行的三個元素,根據餘弦矩陣和尤拉角的定義,就是地理座標系(參考座標系)的Z軸的重力向量。
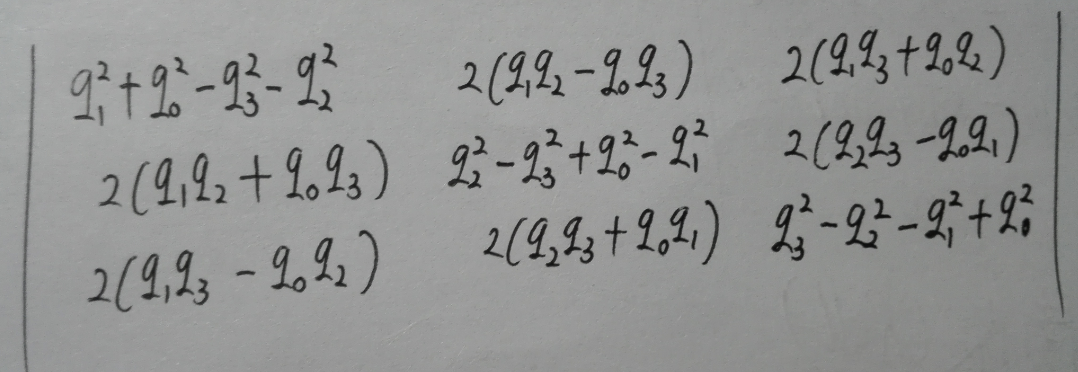
四元數矩陣,轉置之後可以獲得下面的 M 矩陣;所以 M13與四元數矩陣的 Q31元素等價,M23與四元數矩陣的Q32元素等價。 當處理磁力計時,當不考慮外界干擾磁場時,地球磁場的分量為 | Mx 0 My | 在東向的磁場分量為0(北半球,磁場分量指向 北 和 垂直地面)。。。當考慮外界干擾時,為 | Mx My Mz |。。。
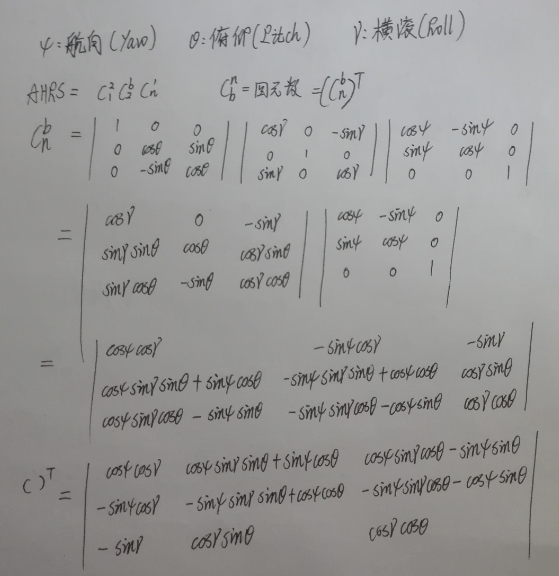
由四元數獲得的旋轉矩陣是固定的;由尤拉角旋轉獲得的矩陣,會因為旋轉順序的不同,而獲得不同的矩陣形式;當小角度旋轉時,可以忽略旋轉順序不同而產生的誤差。當旋轉順序確定之後,兩個旋轉矩陣可以通過相互轉置而獲得等價關係。
摘自 ANALOG DEVICES AN-1057應用筆記
簡介
確定系統傾斜的一種常用方法是對陀螺儀輸出求積分。儘管這種方法簡單明瞭,但隨著積分週期的增加,與零偏穩定性相關的誤差也可能快速增大,即使當器件處於靜止狀態時也可能導致明顯的旋轉。
在某些淨加速度或重力加速度的應用中,可利用加速度計來測量靜態傾斜角。此類應用包括遊戲,數碼相機水平檢測,以及工業和醫學應用中檢測器件方向等。
利用加速度計進行傾斜檢測的基本假設是,加速度只與重力相關。實際上,可對訊號輸出進行訊號處理,以消除其中的高頻組分,因而可以接受一定的交流加速度。
由於重力為直流加速度,因此,任何額外加入的直流加速度都會破壞輸出訊號並導致錯誤計算。造成直流加速度的因素包括車輛以恆定速率加速時的時間,以及在加速度計上導致向心加速度的旋轉器件。在計算傾斜之前對加速度訊號進行的任何過濾都會影響輸出達到新靜態值的速度。
傾斜計算
單軸傾斜計算
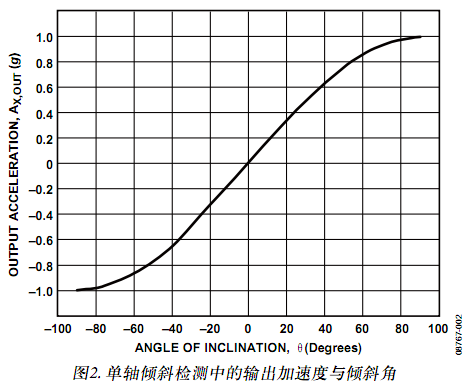
在重力為理想值1 g時,輸出加速度為AX.OUT[g] = 1 g * sin(θ) (1)
採用單軸解決方案時,隨著水平線與x軸夾角的增大,傾斜計算的靈敏度——即一定輸入變化帶來的輸出變化——會變小,該角越接近±90°,靈敏度越接近0(由正弦函式性質決定)。從圖2即可看出這點,圖中,輸出加速度(單位:g)相對於傾斜角。接近±90°時,傾斜角的較大變化會導致輸出加速度發生小幅變化。
由於傾斜計算以數字方式實現,所以輸出加速度表示為單位最低有效位(LSB)的一個恆定加速度或程式碼,該值來自模數轉換器(ADC)或直接來自數字輸出部件。由於輸出解析度為恆定加速度,因此傾斜角度解析度是可變的,其中,其中,最佳解析度在接近0°時取得,最差解析度在±90°時獲得。
圖3和圖4分別為1°和0.25°傾斜角步進下的增量靈敏度。增量靈敏度為單位傾斜角步進的輸出變化(單位:mg),或
S[g] = lg*( sin(N+P) - sin(N) ) (2) 其中: N為初始角度。 P為步長。
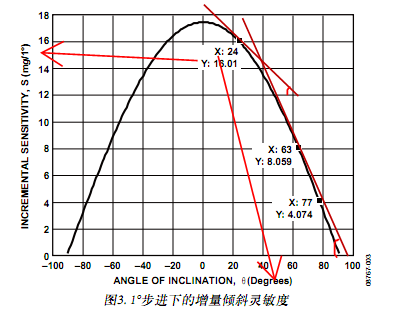
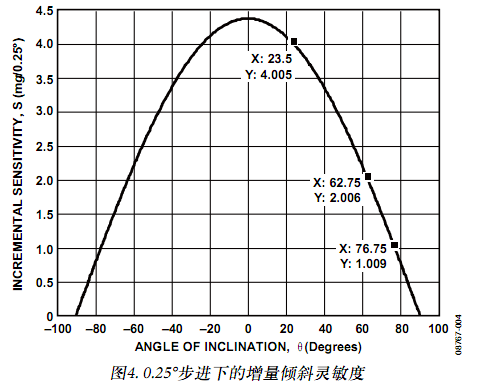
在測量輸出加速度時,可利用這個曲線來確定要求的最低解析度,以滿足具體應用整個範圍的傾斜解析度要求。例如,對於1°的最大步長,±63°範圍至少需要8 mg/LSB的解析度。類似地,在±63°的範圍內,如果要獲得0.25°的最大步長,則需要至少2 mg/LSB的解析度。注意,如果存在大量的擾動,則可藉助過取樣來取得更好的解析度。
由於通過重力旋轉時,加速度計的輸出遵循一種正弦關係,因而通過反正弦函式來實現從加速度到角度的轉換。
 (3)
(3)
其中,傾斜角θ單位為弧度。如果所需傾斜範圍較窄,則可用線性逼近法代替反正弦函式。線性逼近法實為逼近小角度的正弦。
 (4)
(4)
其中,傾斜角θ單位為弧度。 可在傾斜角的線性逼近公式中增加比例因子k,以便在可容忍誤差加大時,增加逼近法的有效範圍。

其中,傾斜角θ單位為弧度。將等式5所得結果乘以(180/π),即可得到角度數。圖5比較了反正弦函式和線性逼近法(其中k=1)的結果。隨著傾斜角度的加大,線性逼近法逐漸失效,計算所得角度開始偏離實際角度。
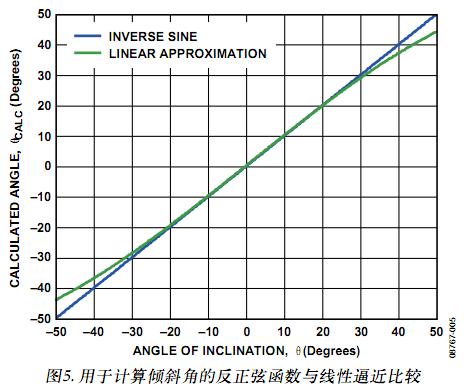
由於算出的角度在座標圖上以實際傾斜角為參照,因而,在兩端,線性逼近法存在一定彎曲。這是因為僅當與輸出加速度相比較時,線性逼近才呈線性,隨著實際傾斜角的加大,輸出加速度具有類似表現(如圖2所示)。然而,反正弦函式產生的輸出與實際傾斜角成一比一關係,當以實際傾斜角為參照時,會使計算角度表現為一條直線。
舉例來說,如果傾斜檢測的目標解析度為1°,則±0.5°的誤差處於可接受水平,因為該誤差值低於計算的舍入誤差。如果對實際傾斜角與計算傾斜角的誤差作圖,且k=1,如圖6所示,則線性逼近法的有效範圍僅為±20°。如果調整比例因子以使誤差最大但仍處於計算舍入限值以內,則線性逼近法的有效範圍將加大至大於±30°的水平。

雙軸傾斜計算
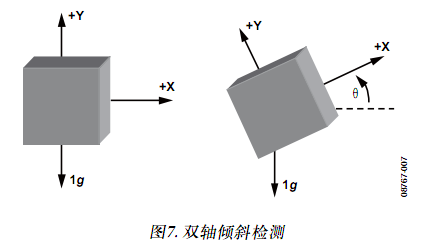
單軸傾斜檢測的一種不足在於,需要採用高解析度ADC或數字輸出,才能獲得大範圍的有效傾斜角,分別如圖3和圖4所示。另一種缺陷是,單軸檢測無法提供360°測量,因為傾斜角N°下產生的加速度等於傾斜角180°-N°下產生的加速度。對於某些應用,這是可以接受的,但對於要求較高解析度的應用,或者需要區分整個360°弧內的不同傾斜角,則需要第二個軸(如圖7所示)或第二個感測器。在採用第二個感測器的情況下,該感測器必須方向正確,使其檢測軸與第一個感測器的檢測軸垂直。
確定傾斜角時採用第二個周,這種做法有三個主要優勢。
恆定靈敏度
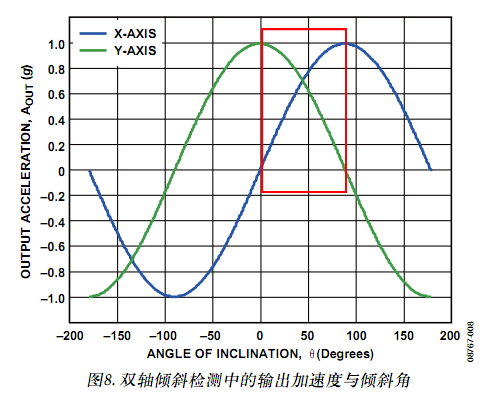
採用第二個軸的首要優勢來自兩軸的垂直關係。與單軸解決方案一樣,x軸檢測到的加速度與傾斜角的正弦具有比例關係。同時與x軸垂直的y軸加速度與傾斜角的餘弦成比例(見圖8)。隨著某個軸的增量靈敏度的降低,比如該軸上的加速度接近+1 g或 -1 g時,另一個軸的增量靈敏度會增加。
將測得加速度轉換成傾斜角的一種方法是計算x軸的反正弦及y軸的反餘弦,與單軸解決方案類似。然而,一種更簡單、更有效的方法是使用來自以下等式的兩個值之比:
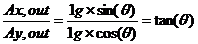 (6)
(6)
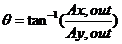
其中,傾斜角θ單位為弧度。
不同於單軸示例,利用兩個軸之比來確定傾斜角的方法極大地增加了確定增量靈敏度的難度。相反,在給定傾斜解析度的條件下,確定加速度計的最低必要解析度顯得更為有用。由於一個軸的增量靈敏度會隨著另一軸的減少而增加,因此兩者的最終結果是一種幾乎恆定的有效增量靈敏度。這就是說,加速度計的解析度只要可以在特定角度下實現目標傾斜步長,這樣的加速度計可以測量所有角度。
為了確定加速度計所需的最低解析度,我們考察了等式6,以確定解析度存在哪些侷限性。由於各軸的輸出取決於傾斜角的正弦或餘弦,且各函式的傾斜角相等,因而,最小可解析角等於最低可解析加速度。
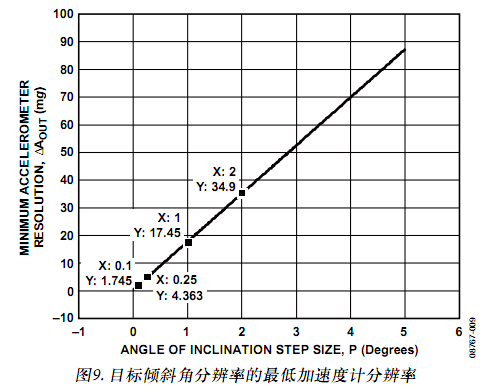
如圖3和圖4所示,正弦函式在接近0°時變化率最大,不難證明,餘弦函式在該點具有最小變化率。為此,由傾斜變化導致的x軸加速度變化可先於y軸加速度變化識別出來。如此一來,系統接近0°時的解析度主要取決於x軸的解析度。若要檢測到等於P°的傾斜變化,加速度計必須能夠檢測到的變化約等於:

圖9可用於確定在目標傾斜步長時,加速度計所需的最低解析度——或加速度計的最大比例因子。請注意,增加的加速度計解析度取決於加速度計比例因子的減少量,以及檢測輸出加速度較小變化的能力。因此,在選擇具有適合解析度的加速度計時,對於目標傾斜步長,比例因子應小於圖9所示限值。
對重心面對齊度的依賴性降低
使用雙軸或多軸的第二個重要優勢在於,在單軸解決方案下,除x軸以外的任何軸發生傾斜都會造成重大誤差,與此不同,在使用第二軸時,即使第三軸存在傾斜時也可測得精確的值。這是因為有效增量靈敏度與目標重力的和方根(RSS)值具有比例關係。 (總的增量值與重力的和方根是比例關係)。
當重力完全處於xy平面之內時,這些軸上檢測到的加速度方和根的理想值等於1 g。如果xz平面或yz平面中存在傾斜,則重力導致的總加速度會減少,同時會減少有效增量靈敏度((有效增量靈敏度減小相當於將解析度進行放大,所以會對應更大的傾斜步長))。這又會加大既定加速度計解析度下的傾斜步長((先將重力在傾斜後的平面上進行分解,那麼分解量是一定的。)),但仍可提供精確的測量值。經傾斜計算得到的角度對應於xy平面的旋轉。
如果系統傾斜角度足夠大,以致於xy平面中僅存在極少重力導致的加速度,則傾斜角步長的準確度不夠,無法使用;因此建議對xz平面或yz平面中的傾斜進行限制。
全形度360°傾斜檢測
採用第二軸的第三個主要優勢是能夠對各個象限進行區分,並能在整個360°弧度內測量角度。
三軸傾斜計算
引入第三軸時,可以在全球面範圍確定感測器的方向。可通過傳統的直角座標(x,y,z)-球面(ρ,θ,φ)轉換法來表徵xy平面傾斜角θ及重力向量傾斜角φ
失調和靈敏度失配誤差校準
本應用筆記中的分析假設採用理想加速度計。該假設等同於使用無0 g失調且具有完美靈敏度的器件——靈敏度以mV/g(模擬感測器)或LSB/g(數字感測器)表示。雖然感測器經過調節,但器件本質上是機械的,這便意味著系統完成裝配後,器件上的任何靜態應力都有可能影響失調和靈敏度。再加上工廠校準的限制,便有可能使誤差超出應用允許的限值以外。
失調誤差的影響
為了表明誤差到底有多大,可以設想一下,某個雙軸解決方案具有完美的靈敏度,但x軸上存在50 mg失調。0°時,x軸讀數為50 mg,y軸讀數則為1 g。由此計算得出的角度就是2.9°,因而會造成2.9°(用反正切計算 arctan(0.05/1)的誤差。±180°時,x軸的讀數為50 mg,y軸的讀數則為−1 g。由此計算得出的角度會存在−2.9°的誤差。圖13所示為本例中算出的角度和實際角度之間的誤差情況。失調引起的誤差可能不僅大於系統所需的精度,而且還會發生變化,使簡單地通過校準消除誤差角變得困難。當多個軸上都
存在失調時,這將會變得更為複雜。

靈敏度失配誤差的影響
在雙軸傾斜檢測應用中,由加速度計靈敏度導致的主要誤差成分是目標軸之間的靈敏度差異(在單軸解決方案中,如果實際靈敏度和預期靈敏度之間存在任何偏差,則會導致
出現誤差)。由於使用的是x和y軸的比值,因此如果兩者靈敏度相同,則可以消除大多數誤差。
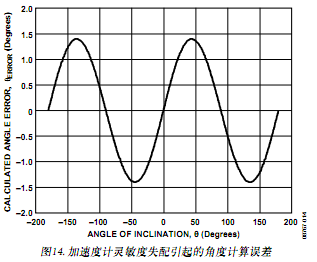
下面舉例說明加速度計靈敏度失配的影響。假設某個雙軸解決方案具有完美的失調調整功能,且y軸具有完美的靈敏度,但x軸的靈敏度為+5%。這表示在1 g場中,y軸讀數為
1 g,x軸讀數則為1.05 g。圖14所示為因為這種靈敏度失配而造成角度計算出現的誤差情況。與失調誤差類似,加速度計靈敏度失配引起的誤差會在整個旋轉範圍內不斷變化,
使在計算出傾斜角後進行誤差補償變得困難。改變y軸的靈敏度會進一步增加失配,從而使誤差更大。
基本校準技術
當失調引起的誤差和靈敏度失配引起的誤差兩者相疊加時,誤差可能會變得相當大,完全超出傾斜檢測應用所能接受的範圍。要減少這類誤差,就應當對失調和靈敏度進行校準,並使用校準後的輸出加速度來計算傾斜角。包括失調和靈敏度的影響後,加速度計輸出變化如下:
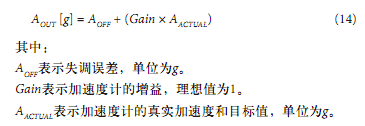
AOUT [g] = AOFF + (Gain × AACTUAL) (14) 其中: AOFF表示失調誤差,單位為g。 Gain表示加速度計的增益,理想值為1。
AACTUAL表示加速度計的真實加速度和目標值,單位為g。
一種簡單的校準方法是假設增益為1並測量失調。經過此校準之後,系統的精度即會限制為未校準的靈敏度誤差。這種簡單的校準方法可通過將目標軸置於0 g場中並測量輸
出(大小等於失調)來完成。然後,應在處理訊號之前從加速度計的輸出中減去該值。這種方法通常稱為無調頭或單點校準,因為器件的典型取向會將x和y軸置於0 g場中。如果使用的是三軸器件,則應針對z軸包含至少一個調頭或第二個點。一種更加精確的校準方法是每個目標軸上取用兩個點(三軸設計最多可取用六個點)。當某個軸處於+1 g和−1 g場中時,測得的輸出如下:
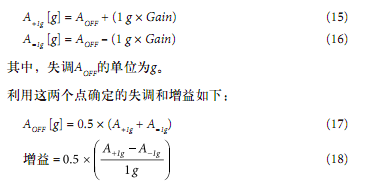
其中,+1 g和−1 g測量結果A+1g和A−1g均以g表示。
由於測量目標軸時,正交軸都處於0 g場,因此這種校準方法還有助於將跨軸靈敏度影響降至最低。利用這些值,首先可以從加速度計測量結果中減去失調,然後將所得結果除以增益。

等式15至等式19中,計算AOFF和增益時,假設加速度值A+1g和A−1g均以g表示。如果加速度單位採用mg,則等式17中AOFF的計算結果會保持不變,但等式18中增益的計算結果需要除以1000,以處理單位上的變化。

這個計算等式說明是相較於感測器的xyz平面的,當使用xy兩個軸進行傾斜檢測時,如果z軸發生了傾斜,那麼檢測傾斜的水平面就發生了小幅度的偏轉,如果傾斜角度特別小,仍能夠保持測量的準確;如果傾斜角度過大,那麼測量結果將偏差很多。