
Image Stitching using Python
阿新 • • 發佈:2018-12-28
Detailed Description
Feature Detection
In this step, we identify points of interest in the image using the Harris corner detection method. For each point in the image, consider a window of pixels around that point. Compute the Harris matrix H for (the window around) that point, defined as

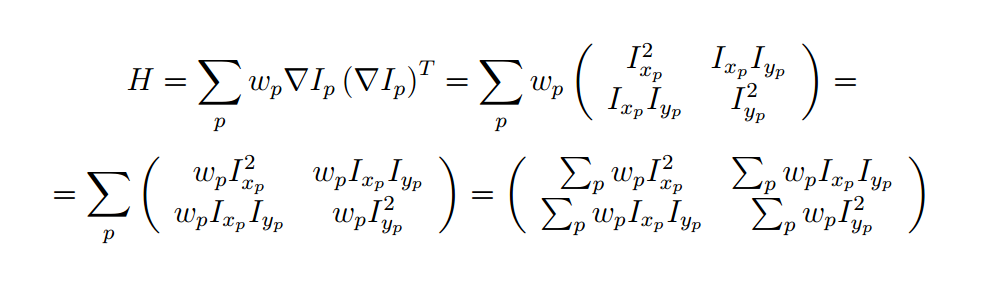
here the Ixp is the is the x derivative of the image at point p, the notation is similar for the y derivative. You should use the Sobel operator to compute the x, y derivatives. The weights should be chosen to be circularly symmetric (for rotation invariance).
H is a 2x2 matrix. To find interest points, first compute the corner strength function as below

Once you’ve computed c for every point in the image, choose points where c is above a threshold.
Use the following command to extract keypoints
dst = cv2.cornerHarris(gray,blockSize,ksize,alpha)
''' img - Input image, it should be grayscale and float32 type. blockSize - It is the size of neighbourhood considered for corner detection ksize - Aperture parameter of Sobel derivative usedaplha - Harris detector free parameter in the equation. '''
#result is dilated for marking the corners, not important
dst = cv2.dilate(dst,None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255]