
座標轉換四引數解算
分享一個前段時間專案中遇到的一個姿勢點,就是求解平面座標四引數轉換的轉換引數;當時學渣小編還是花了些時間研究,其實原理很Easy,過程也很Easy,理解起來更Easy。廢話不多說,下面開整
已知:
轉換前座標點(x1,y1),轉換後坐標點(x2,y2);
二維四引數轉換模型:
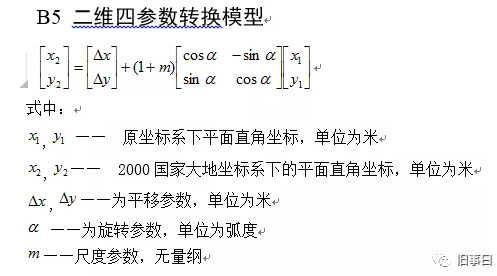
求解:平移引數、旋轉引數、尺度引數。
開始求解:
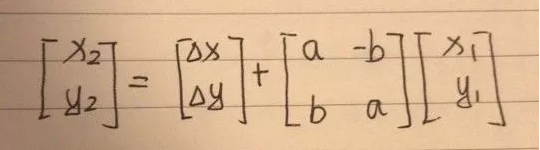
Step1:為了簡化計算公式,我們先設定:

以上轉換模型公式表達為:
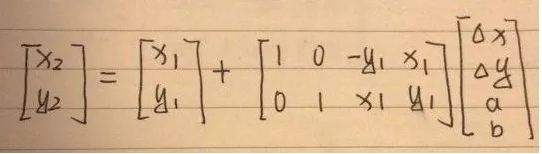
Step2:經過矩陣運算變化,將我們要求解的引數變換到同一個矩陣中:
Step3:利用間接平差法得到以下計算公式:
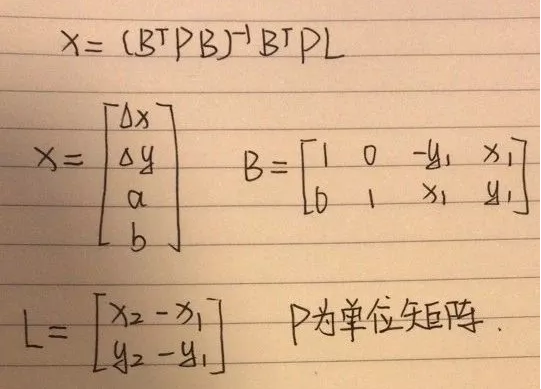
Step4:計算旋轉引數和尺度引數:
至此,我們要求解的引數已經全部計算出來了,很Easy吧。
當然實際生產中,我們的座標是座標點對,可以結合上述計算公式利用最小二乘法來進行計算,同時也可以計算誤差。
相關推薦
座標轉換四引數解算
分享一個前段時間專案中遇到的一個姿勢點,就是求解平面座標四引數轉換的轉換引數;當時學渣小編還是花了些時間研究,其實原理很Easy,過程也很Easy,理解起來更Easy。廢話不多說,下面開整 已知: 轉換前座標點(x1,y1),轉換後坐標點(x2,y2); 二維四引數轉換模型:
校正模型(多項式校正和布林薩模型及最小二乘引數解算)
最近需要實現一個根據控制點進行座標校正的功能,查了資料發現校正模型比較多,由於是地理座標的校正,所以文章中主要提到的布林薩模型,由於之前接觸過影象的校正,在影象校正中則主要使用的是多項式校
四元數及姿態解算 Mahony算法
ast ogg 基本 ping isa cat sts scrip sqrt AHRS(attitude and heading reference system)稱為航姿參考系統。 首先,我們明確一下四元數的知識。 四元數(quaternion)是由我們的威廉·哈密頓
【計算機視覺】opencv靶標相機姿態解算2 根據四個特徵點估計相機姿態 及 實時位姿估計與三維重建相機姿態
https://blog.csdn.net/kyjl888/article/details/71305149 1 基本原理之如何解PNP問題 轉載 基本原理之如何解PNP問題 http://www.cnblogs.com/singlex/p/pose_estimati
proj4,七引數與座標轉換原理
一、wgs84,地心座標系(地心座標系,是在大地體內建立的O-XYZ座標系。原點O設在大地的質心,通常分為地心空間直角座標系(以x,y,z為其座標元素)和地心大地座標系(以B,L,H為其座標元素)),可以與1954北京座標系或1980西安座標系等參心座標系(在參
無人機底層驅動+STM32F4學習心得-8.MPU6050+磁力計的四元數解算姿態
MPU6050主要包含陀螺儀和加速度計。陀螺儀主要測量角速度,即可以測出某一時間段物體轉過的角度。加速度計測量的是物體的加速度,重力加速度即物體受重力作用的情況下具有的加速度,物體靜止時,加速度計測出來的加速度等於重力加速度g,約等於9.8米每平方秒,重力加速度總是豎直向下,
在MFC中繪製地圖以及地理座標與螢幕座標轉換詳解(附工程原始碼)
在MFC中繪圖時,因為都是以畫素為單位的,所以我們只能以整數作為引數。如果我們想要把一幅地圖資料繪製在MFC視窗中,地圖的座標資料肯定的含有小數位的,這樣我們就不能直接在MFC中繪製地圖了,這就涉及到地理座標向螢幕座標的轉換。 1、地理座標轉螢幕座標 首先我們看一張圖(圖
四軸飛行器1.4 姿態解算和Matlab實時姿態顯示
MPU6050資料讀取出來後,經過一個星期的努力,姿態解算和在matlab上的實時顯示姿態終於完成了。 1:完成matlab的串列埠,並且實時通過波形顯示資料 2:新增RTT檢視CPU使用率的擴充套件功能,MPU6050讀取資料的優化 3:四元素表示的座標變
基於四元數的簡單互補濾波姿態解算
序言 鑑於現在飛控的熱度不減當年,越來越多“年輕人”加入飛控制作學習的階段,也有許多新手上來就氣勢洶洶的進行姿態解算,往往使用的就是較為常用的Mahony的互補濾波姿態解算,筆者在多年前也一樣,最開始接觸的就是這個演算法,但是當時懂得馬馬虎虎,直接把資料丟進去
四旋翼姿態解算——互補濾波演算法及理論推導
上次我們討論了姿態解算基礎理論以及幾個比較重要的公式的一些推導,如果有不熟悉的請點選這裡開啟連結。這次來介紹一些實際的姿態解算演算法吧! 一般在程式中,姿態解算的方式有兩種:一種是尤拉角法,一種是四元數法。這裡不介紹尤拉角法,只介紹四元數法,如有興趣可以去
基於四元數的姿態解算演算法圖解
下面的兩個地址是我存放在百度雲網盤的附件,分別是基於四元數的互補濾波法的圖解和梯度下降法的圖解。筆者採用MindManager思維導圖軟體對上述兩種演算法進行詳細的解釋,非常形象。 希望這種方式能夠讓大家快速、準確的理解這兩種演算法的流程。 互補濾波法:
根據仿射變換引數實現從地理座標轉換為影象座標的一個思考
作者:朱金燦 一般而言,從仿射變換引數實現從地理座標轉換為影象座標(行列號座標)遵循以下公式:Col = GT(0) + Xgeo*GT(1)+ Ygeo*GT(2)Row = GT(
四軸飛行器姿態解算預備知識
其實我覺得要說四軸的姿態,我們必須說幾樣東西。 (1)座標系 (2)方向餘弦矩陣 (3)尤拉角 (4)四元數 對上面這四樣東西有了初步的理解,就可以開始看IMU的飛控解算程式了。 其實我剛剛接觸四軸的時候我沒明白為什麼四軸裡面一會來個地理座標系,一會
已知轉換引數前提下的座標轉換操作方法
已知座標轉換七引數的前提下,使用ArcMap軟體進行自定義座標轉換: 1、 在ArcToolbox中選擇 Data Management Tool 中的Projections andTransf
OpenLayers中Map物件的投影引數初始化與座標轉換
OpenLayers中Map中預設使用的經緯度座標系(EPSG:4326),如果我們地圖 圖片採用了墨卡託投影 時,我們就需要在初始化Map物件時對相關的引數進行配置,以使用正確的投影方式; 下面程式碼演示了這個使用:SimpleMap = OpenLayers.Class(OpenLayers.Map,{
四旋翼姿態解算——基礎理論及推導
對於每個像我一樣入坑四軸飛行器不久的新手來說,最初接觸也頗為頭疼的東西之一就是四軸的姿態解算。由於涉及較多的數學知識,很多人也是覺得十分頭疼。所以,我在這裡分享一些我學習過程中的筆記和經驗,以便大家學習。 兩個座標系: 首先,在一個姿態航向參考系統(簡稱
【計算機視覺】opencv靶標相機姿態解算3 根據兩幅影象的位姿估計結果求某點的世界座標 (三維重建)
關鍵詞:相機位姿估計,單目尺寸測量,環境探知 用途:基於相機的環境測量,SLAM,單目尺寸測量 文章型別:原理說明、Demo展示 @Author:VShawn @Date:2016-11-28 @Lab: [email protected] 前言 早就寫好了....不過doc放在膝
四軸飛行器姿態解算必不可少的知識點
1、 慣性測量單元IMU(InertialMeasurement Unit) 姿態航向參考系統AHRS(Attitude and Heading Reference System) 地磁角速度
Cesium座標系及座標轉換詳解
前言 Cesium專案中經常涉及到模型載入、瀏覽以及不同資料之間的座標轉換,弄明白Cesium中採用的座標系以及各個座標系之間的轉換,是我們邁向三維GIS大門的前提,本文詳細的介紹了Cesium中採用的兩大座標系以及之間轉換的各種方法。 Cesium中的座標系 Cesium中常用的座標有兩種WGS84地理座標
常用的四種排序算法
環境 sort 算法 編譯環境 uic ret vc6.0 插入排序 logs #include <stdio.h> void BubbleSort(int a[], int size, int order); void SelectSort(int a[]