Python+OpenCV學習(12)---特徵匹配
阿新 • • 發佈:2018-12-30
利用python學習OpenCV,個人感覺比較方便。函式的形式與C++基本相同,所以切換過來還是比較好的,對於像我這種對python不太熟練的人,使用python的整合開發環境PyCharm進行學習,可以設定斷點除錯,有助於我這類初學者理解掌握。
下面是利用python語言結合OpenCV進行SIFT特徵進行匹配的程式碼:
# -*- coding:utf-8 -*- __author__ = 'Microcosm' import cv2 #from find_obj import filter_matches,explore_match import numpy as np def filter_matches(kp1, kp2, matches, ratio = 0.75): mkp1, mkp2 = [], [] for m in matches: if len(m) == 2 and m[0].distance < m[1].distance * ratio: m = m[0] mkp1.append( kp1[m.queryIdx] ) mkp2.append( kp2[m.trainIdx] ) p1 = np.float32([kp.pt for kp in mkp1]) p2 = np.float32([kp.pt for kp in mkp2]) kp_pairs = zip(mkp1, mkp2) return p1, p2, kp_pairs def explore_match(win, img1, img2, kp_pairs, status = None, H = None): h1, w1 = img1.shape[:2] h2, w2 = img2.shape[:2] vis = np.zeros((max(h1, h2), w1+w2), np.uint8) vis[:h1, :w1] = img1 vis[:h2, w1:w1+w2] = img2 vis = cv2.cvtColor(vis, cv2.COLOR_GRAY2BGR) if H is not None: corners = np.float32([[0, 0], [w1, 0], [w1, h1], [0, h1]]) corners = np.int32( cv2.perspectiveTransform(corners.reshape(1, -1, 2), H).reshape(-1, 2) + (w1, 0) ) cv2.polylines(vis, [corners], True, (255, 255, 255)) if status is None: status = np.ones(len(kp_pairs), np.bool) p1 = np.int32([kpp[0].pt for kpp in kp_pairs]) p2 = np.int32([kpp[1].pt for kpp in kp_pairs]) + (w1, 0) green = (0, 255, 0) red = (0, 0, 255) white = (255, 255, 255) kp_color = (51, 103, 236) for (x1, y1), (x2, y2), inlier in zip(p1, p2, status): if inlier: col = green cv2.circle(vis, (x1, y1), 2, col, -1) cv2.circle(vis, (x2, y2), 2, col, -1) else: col = red r = 2 thickness = 3 cv2.line(vis, (x1-r, y1-r), (x1+r, y1+r), col, thickness) cv2.line(vis, (x1-r, y1+r), (x1+r, y1-r), col, thickness) cv2.line(vis, (x2-r, y2-r), (x2+r, y2+r), col, thickness) cv2.line(vis, (x2-r, y2+r), (x2+r, y2-r), col, thickness) vis0 = vis.copy() for (x1, y1), (x2, y2), inlier in zip(p1, p2, status): if inlier: cv2.line(vis, (x1, y1), (x2, y2), green) cv2.imshow(win, vis) img1 = cv2.imread("E:\python\Python Project\opencv_showimage\images\multi_view_big.jpg") img2 = cv2.imread("E:\python\Python Project\opencv_showimage\images\multi_view_small.jpg") img1_gray = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) img2_gray = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY) sift = cv2.SIFT() kp1,des1 = sift.detectAndCompute(img1_gray, None) kp2,des2 = sift.detectAndCompute(img2_gray, None) # BFmatcher with default parms bf = cv2.BFMatcher(cv2.NORM_L2) matches = bf.knnMatch(des1, des2, k=2) p1,p2,kp_pairs = filter_matches(kp1,kp2,matches,ratio=0.5) explore_match('matches', img1_gray,img2_gray,kp_pairs) #img3 = cv2.drawMatchesKnn(img1_gray,kp1,img2_gray,kp2,good[:10],flag=2) cv2.waitKey(0) cv2.destroyAllWindows()
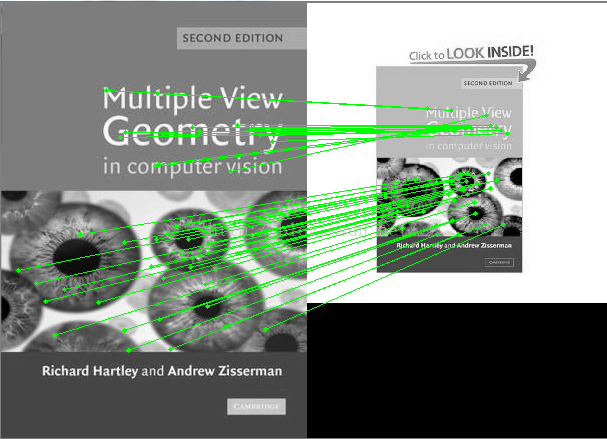
執行結果為: