圖論——Dijkstra+prim演算法涉及到的優先佇列(二叉堆)
阿新 • • 發佈:2018-12-31
【0】README
0.1)為什麼有這篇文章?因為 Dijkstra演算法的優先佇列實現 涉及到了一種新的資料結構,即優先佇列(二叉堆)的操作需要更改以適應這種新的資料結構,我們暫且吧它定義為Distance, 而不是單純的int型別;
【1】因為 Dijkstra演算法的優先佇列實現, 需要用到二叉堆的相關操作,但是操作的元素型別(ElementType 不是 單純的int型別), 而是如下:
struct Distance
{
int vertexIndex; //當前頂點下標
int distance; //初始頂點到當前頂點的distance
};【2】看個荔枝
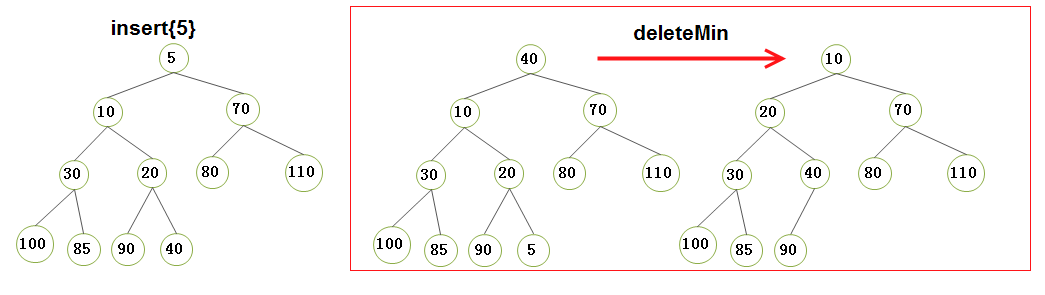
2.1)需要特別說明的是: indexOfVertexInHeap 陣列記錄的是頂點vertex在 heap中的位置, 如 indexOfVertexInHeap [1] = 4;表明heap的第4個位置記錄這 編號為1的vertex;
2.2)優先佇列的insert和deleteMin 的執行演示(請將我的手動演示結果同我的程式碼列印結果做對比,經過對比,你發現它們的效果是一致的,恰好說明了我的程式碼的可行性):
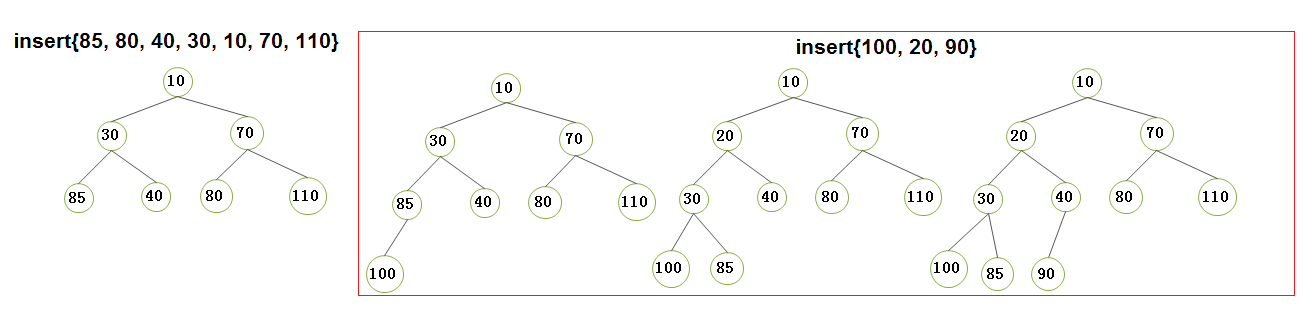
Attention)
- A1)其實本文中的二叉堆優先佇列的實現原始碼和 int型別的優先佇列原始碼類似,只不過它們操作的資料型別不一樣罷了,當然, 這隻需要簡單的修改即可;
- A2)列印結果在文末,可以看到,ElementType採用int 和 Distance的列印效果一樣,這正證明了我們採用Distance結構體對原始碼的修改是無誤的,相比於單純的int 型別,只不過Distance又多了一個 頂點下標vertexIndex成員變數而已;
【3】source code + printing results
1st file:distance.h
#include <stdio.h>
#define Error(str) printf("\n error: %s \n",str)
struct Distance;
typedef struct 2nd file:distance.c
#include "distance.h"
#include <malloc.h>
// allocate the memory for Distance struct
Distance makeEmptyDistance()
{
Distance element;
element = (Distance)malloc(sizeof(struct Distance));
if(!element)
{
Error("out of space ,from func makeEmptyDistance");
return NULL;
}
return element;
}
3rd file:binaryheap.h
#include <stdio.h>
#include <malloc.h>
#include "distance.h"
#define ElementType Distance
#define Error(str) printf("\n error: %s \n",str)
struct BinaryHeap;
typedef struct BinaryHeap *BinaryHeap;
void swap(ElementType x, ElementType y);
BinaryHeap initBinaryHeap(int capacity);
void insert(ElementType value, BinaryHeap bh, int*);
ElementType deleteMin(BinaryHeap, int*);
int isFull(BinaryHeap bh);
int isEmpty(BinaryHeap bh);
void percolateUp(int index, BinaryHeap bh);
void percolateDownFromOne(int index, BinaryHeap bh, int*);
void printBinaryHeap(BinaryHeap bh);
void printBinaryHeapFromZero(BinaryHeap bh);
struct BinaryHeap
{
int capacity;
int size;
ElementType *elements;
};4th file:binaryheap.c
#include "binaryheap.h"
#include <math.h>
#define MaxInt (int)pow(2, 16)
//judge whether the BinaryHeap is full or not , also 1 or 0
int isFull(BinaryHeap bh)
{
return bh->size == bh->capacity - 1;
}
//judge whether the BinaryHeap is empty or not , also 1 or 0
int isEmpty(BinaryHeap bh)
{
return bh->size == 0;
}
// get the left child of node under index with startup 1
int leftChildFromOne(int index)
{
return index * 2;
}
void printBinaryHeap(BinaryHeap bh)
{
int i;
ElementType *temp;
if(!bh)
Error("printing execution failure, for binary heap is null, from func printBinaryHeap");
temp = bh->elements;
for(i = 1; i < bh->capacity; i++)
{
printf("\n\t heap[%d] = ", i);
if(i <= bh->size)
printf("vertex[%d] + distance[%d]", bh->elements[i]->vertexIndex+1, bh->elements[i]->distance);
else
printf("NULL");
}
printf("\n");
}
//print the binary heap who starts from index 0
void printBinaryHeapFromZero(BinaryHeap bh)
{
int i;
ElementType *temp;
if(!bh)
Error("printing execution failure, for binary heap is null, from func printBinaryHeap");
temp = bh->elements;
for(i = 0; i < bh->capacity; i++)
{
printf("\n\t index[%d] = ", i);
if(i < bh->size)
printf("%d", bh->elements[i]->distance);
else
printf("NULL");
}
printf("\n");
}
void swap(ElementType x, ElementType y)
{
struct Distance temp;
temp = *x;
*x = *y;
*y = temp;
}
ElementType deleteMin(BinaryHeap bh, int* heapIndexRecord)
{
ElementType minimum;
ElementType *data;
if(isEmpty(bh))
{
Error("failed deleting minimum , for the BinaryHeap is empty, from func deleteMin !");
return NULL;
}
data = bh->elements;
minimum = data[1];
swap(data[1], data[bh->size]);
bh->size-- ; // size-- occurs prior to percolateDownFromOne
percolateDownFromOne(1, bh, heapIndexRecord) ;
return minimum;
}
// percolating down the element when its value is greater than children (minimal heap)
//Attention: all of bh->elements starts from index 1
void percolateDownFromOne(int index, BinaryHeap bh, int* heapIndexRecord)
{
ElementType *data;
int size;
struct Distance temp;
int child;
data = bh->elements;
size = bh->size;
for(temp = *data[index]; leftChildFromOne(index) <= size; index = child)
{
child = leftChildFromOne(index);
if(child < size && data[child]->distance > data[child+1]->distance)
child++;
if(temp.distance > data[child]->distance)
{
*data[index] = *data[child];
heapIndexRecord[bh->elements[index]->vertexIndex] = index; //update the heapIndexRecord
}
else
break;
}
*data[index] = temp;
heapIndexRecord[bh->elements[index]->vertexIndex] = index; //update the heapIndexRecord
}
// Attention, the index of the heap starts from 1
// return the index the element inserted into the binary heap
void insert(ElementType value, BinaryHeap bh, int* heapIndexRecord)
{
int i;
if(isFull(bh))
{
Error("failed insertion , for the BinaryHeap is full, from func insert!");
return ;
}
if(!isEmpty(bh))
for(i = ++bh->size; bh->elements[i/2]->distance > value->distance; i /= 2)
{
//copyElement(bh->elements[i/2], bh->elements[i]);
*bh->elements[i] = *bh->elements[i/2];
heapIndexRecord[bh->elements[i]->vertexIndex] = i; //update the heapIndexRecord
}
else
i = ++bh->size;
*bh->elements[i] = *value;
heapIndexRecord[bh->elements[i]->vertexIndex] = i; //update the heapIndexRecord
}
BinaryHeap initBinaryHeap(int capacity)
{
BinaryHeap bh;
ElementType *temp;
int i;
bh = (BinaryHeap)malloc(sizeof(struct BinaryHeap));
if(!bh) {
Error("out of space, from func initBinaryHeap");
return NULL;
}
bh->capacity = capacity;
bh->size = 0;
temp = (ElementType*)malloc(capacity * sizeof(Distance));
if(!temp) {
Error("out of space, from func initBinaryHeap");
return NULL;
}
bh->elements = temp;
for(i=0; i < capacity; i++)
{
temp[i] = (ElementType)malloc(sizeof(struct Distance));
if(!temp[i]) {
Error("out of space, from func initBinaryHeap");
return NULL;
}
}
return bh;
}
// allocate the memory for storing index of vertex in heap and let every element -1
int *makeEmptyArray(int size)
{
int *array;
int i;
array = (int*)malloc(size * sizeof(int));
if(!array)
{
Error("out of space ,from func makeEmptyArray");
return NULL;
}
for(i=0; i<size; i++)
array[i] = -1;
return array;
}
void printIndexOfVertexInHeap(int size, int *array)
{
int i;
for(i=0; i<size; i++)
printf("\tindexOfVertexInHeap[%d] = %d\n", i+1, array[i]);
}
int main()
{
int data[] = {85, 80, 40, 30, 10, 70, 110}; // P141
int buildHeapData[] = {150, 80, 40, 30, 10, 70, 110, 100, 20, 90, 60, 50, 120, 140, 130};
BinaryHeap bh;
int size;
int i;
int capacity;
Distance tempDisStruct;
int *indexOfVertexInHeap;
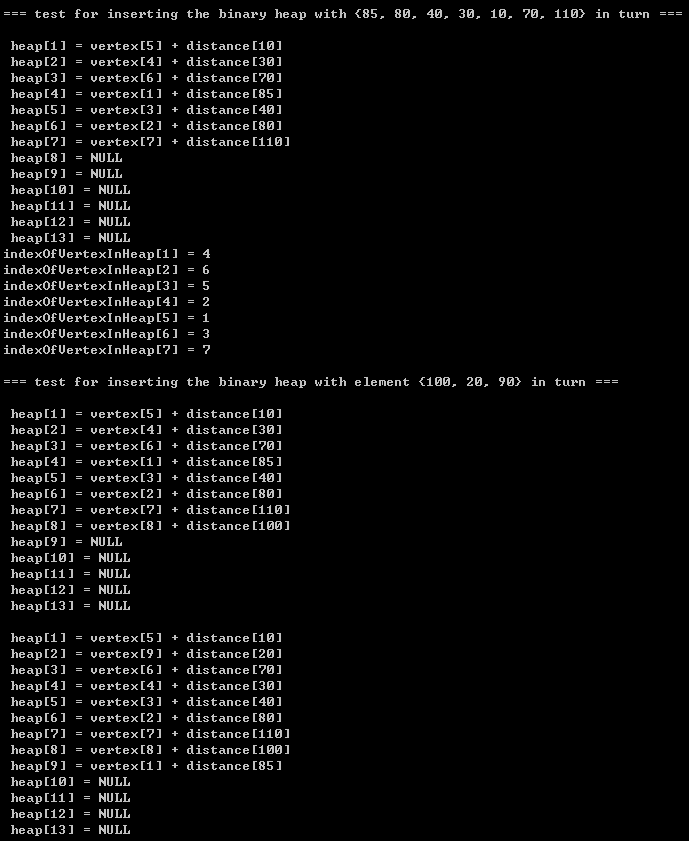
printf("\n\t=== test for inserting the binary heap with {85, 80, 40, 30, 10, 70, 110} in turn ===\n");
capacity = 14;
bh = initBinaryHeap(capacity);
size = 7;
tempDisStruct = makeEmptyDistance();
indexOfVertexInHeap = makeEmptyArray(size);
for(i = 0; i < size; i++)
{
tempDisStruct->distance = data[i];
tempDisStruct->vertexIndex = i;
insert(tempDisStruct, bh, indexOfVertexInHeap);
}
printBinaryHeap(bh);
printIndexOfVertexInHeap(bh->size, indexOfVertexInHeap);
printf("\n\t=== test for inserting the binary heap with element {100, 20, 90} in turn ===\n");
tempDisStruct->distance = 100;
tempDisStruct->vertexIndex = size;
insert(tempDisStruct, bh, indexOfVertexInHeap);
printBinaryHeap(bh);
tempDisStruct->distance = 20;
tempDisStruct->vertexIndex = size+1;
insert(tempDisStruct, bh, indexOfVertexInHeap);
printBinaryHeap(bh);
tempDisStruct->distance = 90;
tempDisStruct->vertexIndex = size+2;
insert(tempDisStruct, bh, indexOfVertexInHeap);
printBinaryHeap(bh);
printIndexOfVertexInHeap(bh->size, indexOfVertexInHeap);
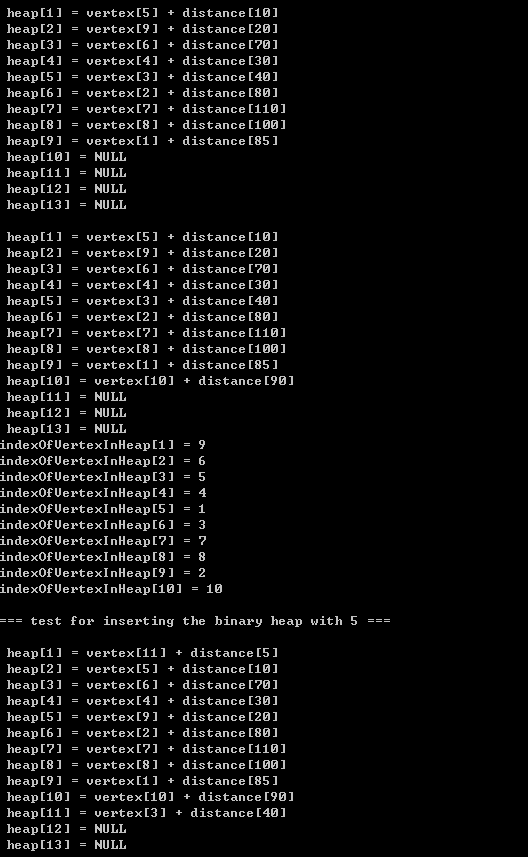
printf("\n\t=== test for inserting the binary heap with 5 ===\n");
tempDisStruct->distance = 5;
tempDisStruct->vertexIndex = size+3;
insert(tempDisStruct, bh, indexOfVertexInHeap);
printBinaryHeap(bh);
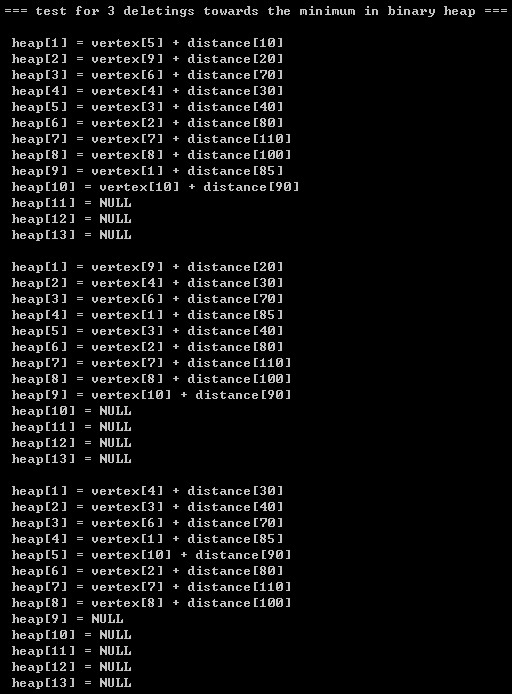
printf("\n\t=== test for 3 deletings towards the minimum in binary heap ===\n");
deleteMin(bh, indexOfVertexInHeap);
printBinaryHeap(bh);
deleteMin(bh, indexOfVertexInHeap);
printBinaryHeap(bh);
deleteMin(bh, indexOfVertexInHeap);
printBinaryHeap(bh);
}
3.3)printing results: