Opencv實現:SIFT特徵提取+RANSAC剔除誤匹配點
阿新 • • 發佈:2019-01-01
最近整理一下利用SIFT特徵提取方法和RANSAC(隨機抽樣一致性方法)進行剔除無匹配點的內容,將實現過程進行記錄。
程式註釋的非常清楚了,新手也能很快看懂。
//讀取影象
Mat img01=imread("3.png");
Mat img02=imread("4.png");
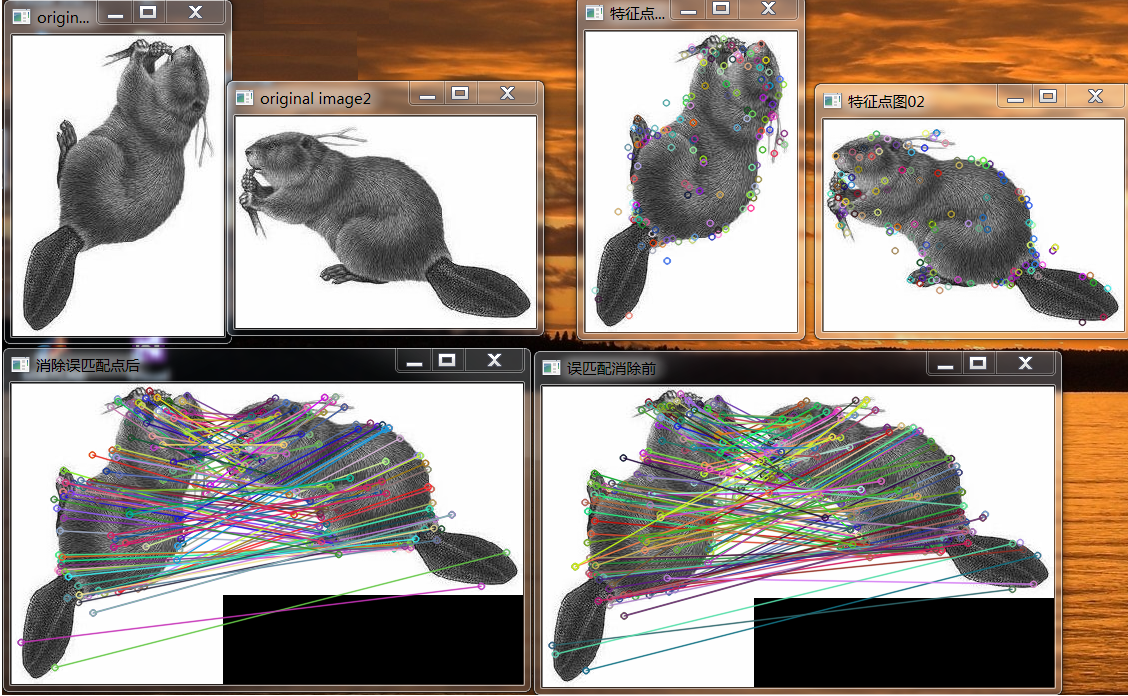
imshow("original image1",img01);
imshow("original image2",img02);
//SIFT特徵檢測
SiftFeatureDetector detector; //定義特點點檢測器
vector<KeyPoint> 下面是利用RANSAC進行消除無匹配點:
//RANSAC 消除誤匹配特徵點 主要分為三個部分:
//1)根據matches將特徵點對齊,將座標轉換為float型別
//2)使用求基礎矩陣方法 findFundamentalMat,得到RansacStatus
//3)根據RansacStatus來將誤匹配的點也即RansacStatus[i]=0的點刪除
//根據matches將特徵點對齊,將座標轉換為float型別
vector<KeyPoint> R_keypoint01,R_keypoint02;
for (size_t i=0;i<matches.size();i++)
{
R_keypoint01.push_back(keypoint01[matches[i].queryIdx]);
R_keypoint02.push_back(keypoint02[matches[i].trainIdx]);
//這兩句話的理解:R_keypoint1是要儲存img01中能與img02匹配的特徵點,
//matches中儲存了這些匹配點對的img01和img02的索引值
}
//座標轉換
vector<Point2f>p01,p02;
for (size_t i=0;i<matches.size();i++)
{
p01.push_back(R_keypoint01[i].pt);
p02.push_back(R_keypoint02[i].pt);
}
//利用基礎矩陣剔除誤匹配點
vector<uchar> RansacStatus;
Mat Fundamental= findFundamentalMat(p01,p02,RansacStatus,FM_RANSAC);
vector<KeyPoint> RR_keypoint01,RR_keypoint02;
vector<DMatch> RR_matches; //重新定義RR_keypoint 和RR_matches來儲存新的關鍵點和匹配矩陣
int index=0;
for (size_t i=0;i<matches.size();i++)
{
if (RansacStatus[i]!=0)
{
RR_keypoint01.push_back(R_keypoint01[i]);
RR_keypoint02.push_back(R_keypoint02[i]);
matches[i].queryIdx=index;
matches[i].trainIdx=index;
RR_matches.push_back(matches[i]);
index++;
}
}
Mat img_RR_matches;
drawMatches(img01,RR_keypoint01,img02,RR_keypoint02,RR_matches,img_RR_matches);
imshow("消除誤匹配點後",img_RR_matches);實現效果如圖: