
matlab影象特徵提取--邊緣,角點,SURF檢測
1.影象的邊緣檢測.
影象的邊緣是指周圍畫素灰度急劇變化的那些畫素的集合,它是影象最基本的特徵.邊緣存在於目標,背景和區域之間,所以,它是影象分割所依賴的最重要依據.由於邊緣是位置的標誌,對灰度的變化不敏感,因此,邊緣也是影象匹配的重要特徵.
邊緣檢測基本思想是先檢測影象中的邊緣點,再按照某種策略將邊緣點連線或輪廓,從而構成分割區域.由於邊緣是所要提取目標和背景的分界線,提取出邊緣才能將目標和背景區分開,因此邊緣檢測對於數字影象處理十分重要.
邊緣大致可以分為兩種:一種是階躍狀邊緣,邊緣兩邊畫素的灰度值明顯不同;另一種為屋頂狀邊緣,邊緣處於灰度值由小到大再到小變化的轉折點處.
2.邊緣檢測中Prewitt
prewitt運算元是加權平均運算元,對噪聲有抑制作用,但是畫素平均相當於對影象進行地同濾波.
3.邊緣檢測中Canny運算元
Canny邊緣檢測是一種比較新的邊緣檢測運算元,具有很好的邊緣監測效能,在影象處理中得到了越來越廣泛的應用。
4.角點特徵檢測
角點是兩個邊緣的交點;角點是領域內具有兩個主方向的特徵點.角點所在的領域通常也是影象中穩定的,資訊豐富的區域,這些領域可能具有某些特性,如旋轉不變性,尺度不變性,仿射不變性和光照亮度不變性.因此在計算機視覺和數字影象領域,研究角點具有重要意義.
5.Harris角點基本原理
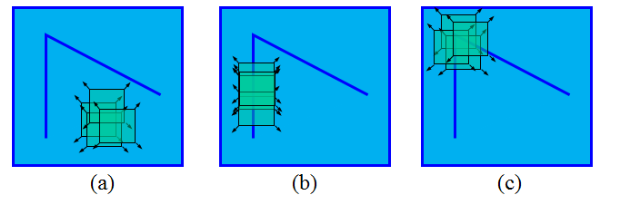
當一個視窗在影象上移動,在平滑區域如圖(a),視窗在各個方向上沒有變化。在邊緣上如圖
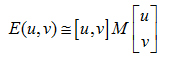
將影象視窗平移[u,v]產生灰度變化E(u,v)

由:

對於區域性微小的移動量 [u,v],近似表達為:
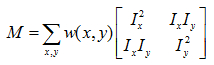
其中M是 2*2 矩陣,可由影象的導數求得:
E(u,v)的橢圓形式如下圖:
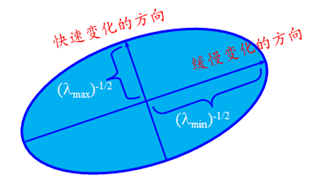
定義角點響應函式 R 為:

6.SURF特徵提取原理
計算機視覺中,引入尺度不變的特徵,主要的思想是每個檢測到的特徵點都伴隨著對應的尺寸因子。當我們想匹配不同影象時,經常會遇到影象尺度不同的問題,不同影象中特徵點的距離變得不同,物體變成不同的尺寸,如果我們通過修正特徵點的大小,就會造成強度不匹配。為了解決這個問題,提出一個尺度不變的