
尋找距離最小的平面點對——分治方法
在應用中,常用諸如點、圓等簡單的幾何物件代表現實世界中的實體。在涉及這些幾何物件的問題中,常需要了解其鄰域中其他幾何物件的資訊。例如,在空中交通控制問題中,若將飛機作為空間中移動的一個點來看待,則具有最大碰撞危險的2架飛機,就是這個空間中最接近的一對點。這類問題是計算幾何學中研究的基本問題之一。下面我們著重考慮平面上的最接近點對問題。
最接近點對問題的提法是:給定平面上n個點,找其中的一對點,使得在n個點的所有點對中,該點對的距離最小。
嚴格地說,最接近點對可能多於1對。為了簡單起見,這裡只限於找其中的一對。
參考解答
這個問題很容易理解,似乎也不難解決。我們只要將每一點與其他n-1個點的距離算出,找出達到最小距離的兩個點即可。然而,這樣做效率太低,需要O(n2)的計算時間。在問題的計算複雜性中我們可以看到,該問題的計算時間下界為Ω(nlogn)。這個下界引導我們去找問題的一個θ(nlogn)演算法。
這個問題顯然滿足分治法的第一個和第二個適用條件,我們考慮將所給的平面上n個點的集合S分成2個子集S1和S2,每個子集中約有n/2個點,·然後在每個子集中遞迴地求其最接近的點對。在這裡,一個關鍵的問題是如何實現分治法中的合併步驟,即由S1和S2的最接近點對,如何求得原集合S中的最接近點對,因為S1和S2的最接近點對未必就是S的最接近點對。如果組成S的最接近點對的2個點都在S1中或都在S2中,則問題很容易解決。但是,如果這2個點分別在S1和S2中,則對於S1中任一點p,S2中最多隻有n/2個點與它構成最接近點對的候選者,仍需做n2/4次計算和比較才能確定S的最接近點對。因此,依此思路,合併步驟耗時為O(n2)。整個演算法所需計算時間T(n)應滿足:
T(n)=2T(n/2)+O(n2)
它的解為T(n)=O(n2),即與合併步驟的耗時同階,顯示不出比用窮舉的方法好。從解遞迴方程的套用公式法,我們看到問題出在合併步驟耗時太多。這啟發我們把注意力放在合併步驟上。
為了使問題易於理解和分析,我們先來考慮一維的情形。此時S中的n個點退化為x軸上的n個實數x1,x2,..,xn。最接近點對即為這n個實數中相差最小的2個實數。我們顯然可以先將x1,x2,..,xn排好序,然後,用一次線性掃描就可以找出最接近點對。這種方法主要計算時間花在排序上,因此如在排序演算法中所證明的,耗時為O(nlogn)。然而這種方法無法直接推廣到二維的情形。因此,對這種一維的簡單情形,我們還是嘗試用分治法來求解,並希望能推廣到二維的情形。
假設我們用x軸上某個點m將S劃分為2個子集S1和S2,使得S1={x∈S|x≤m};S2={x∈S|x>m}。這樣一來,對於所有p∈S1和q∈S2有p
遞迴地在S1和S2上找出其最接近點對{p1,p2}和{q1,q2},並設δ=min{|p1-p2|,|q1-q2|},S中的最接近點對或者是{p1,p2},或者是{q1,q2},或者是某個{p3,q3},其中p3∈S1且q3∈S2。如圖1所示。
圖1 一維情形的分治法
我們注意到,如果S的最接近點對是{p3,q3},即|p3-q3|<δ,則p3和q3兩者與m的距離不超過δ,即|p3-m|<δ,|q3-m|<δ,也就是說,p3∈(m-δ,m],q3∈(m,m+δ]。由於在S1中,每個長度為δ的半閉區間至多包含一個點(否則必有兩點距離小於δ),並且m是S1和S2的分割點,因此(m-δ,m]中至多包含S中的一個點。同理,(m,m+δ]中也至多包含S中的一個點。由圖1可以看出,如果(m-δ,m]中有S中的點,則此點就是S1中最大點。同理,如果(m,m+δ]中有S中的點,則此點就是S2中最小點。因此,我們用線性時間就能找到區間(m-δ,m]和(m,m+δ]中所有點,即p3和q3。從而我們用線性時間就可以將S1的解和S2的解合併成為S的解。也就是說,按這種分治策略,合併步可在O(n)時間內完成。這樣是否就可以得到一個有效的演算法了呢?還有一個問題需要認真考慮,即分割點m的選取,及S1和S2的劃分。選取分割點m的一個基本要求是由此匯出集合S的一個線性分割,即S=S1∪S2 ,S1∩S2=Φ,且S1{x|x≤m};S2{x|x>m}。容易看出,如果選取m=[max(S)+min(S)]/2,可以滿足線性分割的要求。選取分割點後,再用O(n)時間即可將S劃分成S1={x∈S|x≤m}和S2={x∈S|x>m}。然而,這樣選取分割點m,有可能造成劃分出的子集S1和S2的不平衡。例如在最壞情況下,|S1|=1,|S2|=n-1,由此產生的分治法在最壞情況下所需的計算時間T(n)應滿足遞迴方程:
T(n)=T(n-1)+O(n)
它的解是T(n)=O(n2)。這種效率降低的現象可以通過分治法中"平衡子問題"的方法加以解決。也就是說,我們可以通過適當選擇分割點m,使S1和S2中有大致相等個數的點。自然地,我們會想到用S的n個點的座標的中位數來作分割點。在選擇演算法中介紹的選取中位數的線性時間演算法使我們可以在O(n)時間內確定一個平衡的分割點m。
至此,我們可以設計出一個求一維點集S中最接近點對的距離的演算法CPAIR1如下。
function CPAIR1(S);
begin
if |S|=2
then δ=|x[2]-x[1]| // x[1..n]存放的是S中n個點的座標
else if (|S|=1)
then δ:=∞
else
begin
m:=S中各點的座標值的中位數;
構造S1和S2,使S1={x∈S|x≤m},S2={x∈S|x>m}; δ1:=CPAIRI(S1); δ2:=CPAIRI(S2);
p:=max(S1); q:=min(S2);
δ:=min(δ1,δ2,q-p);
end;
return(δ);
end;
由以上的分析可知,該演算法的分割步驟和合並步驟總共耗時O(n)。因此,演算法耗費的計算時間T(n)滿足遞迴方程:
解此遞迴方程可得T(n)=O(nlogn)。
這個演算法看上去比用排序加掃描的演算法複雜,然而這個演算法可以向二維推廣。
下面我們來考慮二維的情形。此時S中的點為平面上的點,它們都有2個座標值x和y。為了將平面上點集S線性分割為大小大致相等的2個子集S1和S2,我們選取一垂直線l:x=m來作為分割直線。其中m為S中各點x座標的中位數。由此將S分割為S1={p∈S|px≤m}和S2={p∈S|px>m}。從而使S1和S2分別位於直線l的左側和右側,且S=S1∪S2 。由於m是S中各點x座標值的中位數,因此S1和S2中的點數大致相等。
遞迴地在S1和S2上解最接近點對問題,我們分別得到S1和S2中的最小距離δ1和δ2。現設δ=min(δ1,δ1)。若S的最接近點對(p,q)之間的距離d(p,q)<δ則p和q必分屬於S1和S2。不妨設p∈S1,q∈S2。那麼p和q距直線l的距離均小於δ。因此,我們若用P1和P2分別表示直線l的左邊和右邊的寬為δ的2個垂直長條,則p∈P1,q∈P2,如圖2所示。
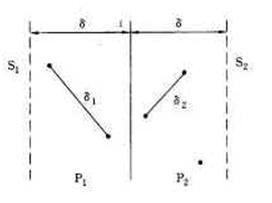
圖2 距直線l的距離小於δ的所有點
在一維的情形,距分割點距離為δ的2個區間(m-δ,m](m,m+δ]中最多各有S中一個點。因而這2點成為唯一的末檢查過的最接近點對候選者。二維的情形則要複雜些,此時,P1中所有點與P2中所有點構成的點對均為最接近點對的候選者。在最壞情況下有n2/4對這樣的候選者。但是P1和P2中的點具有以下的稀疏性質,它使我們不必檢查所有這n2/4對候選者。考慮P1中任意一點p,它若與P2中的點q構成最接近點對的候選者,則必有d(p,q)<δ。滿足這個條件的P2中的點有多少個呢?容易看出這樣的點一定落在一個δ×2δ的矩形R中,如圖3所示。
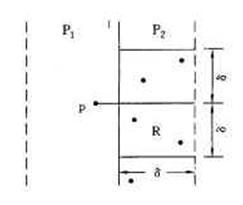
圖3 包含點q的δ×2δ的矩形R
由δ的意義可知P2中任何2個S中的點的距離都不小於δ。由此可以推出矩形R中最多隻有6個S中的點。事實上,我們可以將矩形R的長為2δ的邊3等分,將它的長為δ的邊2等分,由此匯出6個(δ/2)×(2δ/3)的矩形。如圖4(a)所示。
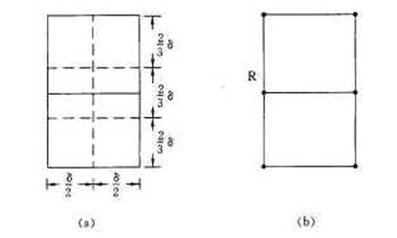
圖4 矩形R中點的稀疏性
若矩形R中有多於6個S中的點,則由鴿舍原理易知至少有一個δ×2δ的小矩形中有2個以上S中的點。設u,v是這樣2個點,它們位於同一小矩形中,則
因此d(u,v)≤5δ/6<δ 。這與δ的意義相矛盾。也就是說矩形R中最多隻有6個S中的點。圖4(b)是矩形R中含有S中的6個點的極端情形。由於這種稀疏性質,對於P1中任一點p,P2中最多隻有6個點與它構成最接近點對的候選者。因此,在分治法的合併步驟中,我們最多隻需要檢查6×n/2=3n對候選者,而不是n2/4對候選者。這是否就意味著我們可以在O(n)時間內完成分治法的合併步驟呢?現在還不能作出這個結論,因為我們只知道對於P1中每個S1中的點p最多隻需要檢查P2中的6個點,但是我們並不確切地知道要檢查哪6個點。為了解決這個問題,我們可以將p和P2中所有S2的點投影到垂直線l上。由於能與p點一起構成最接近點對候選者的S2中點一定在矩形R中,所以它們在直線l上的投影點距p在l上投影點的距離小於δ。由上面的分析可知,這種投影點最多隻有6個。因此,若將P1和P2中所有S的點按其y座標排好序,則對P1中所有點p,對排好序的點列作一次掃描,就可以找出所有最接近點對的候選者,對P1中每一點最多隻要檢查P2中排好序的相繼6個點。
至此,我們可以給出用分治法求二維最接近點對的演算法CPAIR2如下:
function CPAIR2(S);
begin
if |S|=2
then δ:=S中這2點的距離
else if |S|=0
then δ:=∞
else
begin
1. m:=S中各點x座標值的中位數; 構造S1和S2,使S1={p∈S|px≤m}和S2={p∈S|px>m}
2. δ1:=CPAIR2(S1);δ2:=CPAIR2(S2);
3. δm:=min(δ1,δ2);
4. 設P1是S1中距垂直分割線l的距離在δm之內的所有點組成的集合, P2是S2中距分割線l的距離在δm之內所有點組成的集合。將P1和P2中的點依其y座標值從小到大排序,並設P1*和P2*是相應的已排好序的點列;
5. 通過掃描P1*以及對於P1*中每個點檢查P2*中與其距離在δm之內的所有點(最多6個)可以完成合並。當P1*中的掃描指標逐次向上移動 時,P2*中的掃描指標可在寬為2δm的一個區間內移動。設δl是按 這種掃描方式找到的點對間的最小距離;
6. δ=min(δm,δl);
end;
return(δ);
end;
下面我們來分析一下演算法CPAIR2的計算複雜性。設對於n個點的平面點集S,演算法耗時T(n)。演算法的第1步和第5步用了O(n)時間,第3步和第6步用了常數時間,第2步用了2T(n/2)時間。若在每次執行第4步時進行排序,則在最壞情況下第4步要用O(nlogn)時間。這不符合我們的要求。因此,在這裡我們要作一個技術上的處理。我們採用設計演算法時常用的預排序技術,即在使用分治法之前,預先將S中n個點依其y座標值排好序,設排好序的點列為P*。在執行分治法的第4步時,只要對P*作一次線性掃描,即可抽取出我們所需要的排好序的點列P1*和P2*。然後,在第5步中再對P1*作一次線性掃描,即可求得δl。因此,第4步和第5步的兩遍掃描合在一起只要用O(n)時間。這樣一來,經過預排序處理後的演算法CPAIR2所需的計算時間T(n)滿足遞迴方程:
顯而易見T(n)=O(nlogn),預排序所需的計算時間為O(n1ogn)。因此,整個演算法所需的計算時間為O(nlogn)。在漸近的意義下,此演算法已是最優的了。
本片博文轉自:https://blog.csdn.net/matricer/article/details/53012797
下面是我根據上面的思想寫的程式碼實現
#include<iostream>
#include<cmath>
#include<algorithm>
using namespace std;
const int maxn=1e6;
const double INF=1e50;//正無窮,可根據題意增大其值
struct node{
double x,y;
}point[maxn],term[maxn];
bool cmpx(node a,node b)//按x從小到大排序
{
return a.x<b.x;
}
bool cmpy(node a,node b)//按y從小到大排序
{
return a.y<b.y;
}
double distanc(node a,node b)//求兩點之間距離
{
return sqrt((a.x-b.x)*(a.x-b.x) + (a.y-b.y)*(a.y-b.y));
}
double minpairsdis(int left,int right)//求當前集合最小點對之間的距離
{
double dis=INF;//初始化無窮大
if(left==right)//只有一個點返回無窮大
return dis;
if(left+1==right)//有兩個點,沒得選,返回這兩點之間距離
return distanc(point[left],point[right]);
int mid=(left+right)/2;//分割集合的那條中線
double d1=minpairsdis(left,mid);//左邊集合最小點對之間的距離
double d2=minpairsdis(mid+1,right);//右邊集合最小點對之間的距離
dis=min(d1,d2);//最小距離
int i,j,k=0;
for(i=left;i<=right;i++)//距離分割線小於等於dis之間的點
{
if(fabs(point[i].x-point[mid].x)<=dis)
term[k++]=point[i];
}
sort(term,term+k,cmpy);
for(i=0;i<k;i++)
{
for(j=i+1;j<k;j++)
{
if(term[j].y-term[i].y>dis)//y值之差小於dis的才滿足
break;
else
dis=min(dis,distanc(term[i],term[j]));
}
}
return dis;
}
int main()
{
int n;
cin>>n;
for(int i=0;i<n;i++)
cin>>point[i].x>>point[i].y;
sort(point,point+n,cmpx);
double ans=minpairsdis(0,n-1);
cout<<ans<<endl;
return 0;
}