
【目標檢測】NMS(Non-maximum suppression,非極大值抑制)演算法
阿新 • • 發佈:2019-01-04
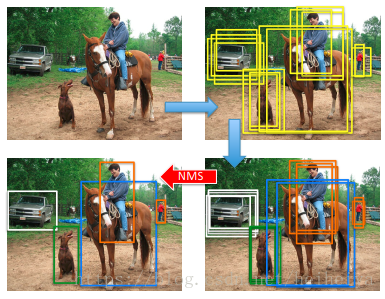
NMS廣泛應用於目標檢測演算法中。其目的是為了消除多餘的候選框,找到最佳的物體檢測位置。
現在假設有有一個候選的boxes的集合B和其對應的scores集合S:
1. 找出分數最高的M;
2. 將M對應的box從B中刪除;
3. 將刪除的box新增到集合D中;
4. 從B中刪除與M對應的box重疊區域大於閾值Nt的其他框;
5. 重複上述步驟1-4。
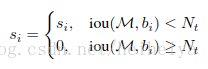
虛擬碼如下:

其中si可表述為:
Mask RCNN中的python實現:
def non_max_suppression(boxes, scores, threshold): """執行non-maximum suppression並返回保留的boxes的索引. boxes: [N, (y1, x1, y2, x2)].注意(y2, x2)可以會超過box的邊界. scores: box的分數的一維陣列. threshold: Float型. 用於過濾IoU的閾值. """ assert boxes.shape[0] > 0 if boxes.dtype.kind != "f": boxes = boxes.astype(np.float32) #計算box面積 y1 = boxes[:, 0] x1 = boxes[:, 1] y2 = boxes[:, 2] x2 = boxes[:, 3] area = (y2 - y1) * (x2 - x1) #獲取根據分數排序的boxes的索引(最高的排在對前面) ixs = scores.argsort()[::-1] pick = [] while len(ixs) > 0: #選擇排在最前的box,並將其索引加到列表中 i = ixs[0] pick.append(i) #計算選擇的box與剩下的box的IoU iou = compute_iou(boxes[i], boxes[ixs[1:]], area[i], area[ixs[1:]]) #確定IoU大於閾值的boxes. 這裡返回的是ix[1:]之後的索引, #所以為了與ixs保持一致,將結果加1 remove_ixs = np.where(iou > threshold)[0] + 1 #將選擇的box和重疊的boxes的索引刪除. ixs = np.delete(ixs, remove_ixs) ixs = np.delete(ixs, 0) return np.array(pick, dtype=np.int32)