
H矩陣求取旋轉和平移分量
最近在做機器人導航專案,於是就順手在OpenCV裡面將以前看過但是不太理解的從Homography求Rotation和Translation實現了一下
程式碼如下:
- int calcRTfromHomo(CvMat* H, double t[3], double rodrot[3]){
- double r[9];
- CvMat _r = cvMat(3, 3, CV_64F, r); //rotation matrix
- double intrinsic[9]={1, 0, 0, 0, 1, 0, 0, 0, 1};
-
CvMat _M = cvMat(3, 3, CV_64F, intrinsic); //intrinsic matrix, of no use in this implementation, reserved for future use
- double ones[]={1,1,1};
- CvMat _ones = cvMat(3, 1, CV_64F, ones);
- // double rodrot[3];
- CvMat _rodrot = cvMat(3, 1, CV_64F, rodrot);
- //for SVD
- CvMat* U = cvCreateMat(3, 3, CV_64F);
- CvMat* W = cvCreateMat(3, 3, CV_64F);
- CvMat* V = cvCreateMat(3, 3, CV_64F);
-
CvMat* invM = cvCreateMat(3, 3, CV_64F);
- // three columns of Homography matrix
- CvMat* h1 = cvCreateMat(3, 1, CV_64F);
- CvMat* h2 = cvCreateMat(3, 1, CV_64F);
- CvMat* h3 = cvCreateMat(3, 1, CV_64F);
- // three columns of rotation matrix
- CvMat* r1 = cvCreateMat(3, 1, CV_64F);
-
CvMat* r2 = cvCreateMat(3, 1, CV_64F);
- CvMat* r3 = cvCreateMat(3, 1, CV_64F);
- // translation vector
- CvMat _t = cvMat(3, 1, CV_64F, t);
- cvGetCol(H,h1,0);
- cvGetCol(H,h2,1);
- cvGetCol(H,h3,2);
- cvGetCol(&_r,r1,0);
- cvGetCol(&_r,r2,1);
- cvGetCol(&_r,r3,2);
- cvInvert(&_M, invM);
- cvMatMul(invM,h1,r1);
- cvMatMul(invM,h2,r2);
- cvMatMul(invM,h3,&_t);
- cvNormalize(r1, r1);
- cvMul(r2,&_ones,r2,1/cvNorm(r1));
- cvMul(&_t,&_ones, &_t,1/cvNorm(r1) );
- cvCrossProduct(r1, r2, r3);
- cvSVD(&_r, W, U, V, CV_SVD_V_T);
- cvMatMul(U,V,&_r);
- cvRodrigues2(&_r, &_rodrot, NULL);
- return 1;
- }
程式碼原理的話可以參考[1],實現的時候還碰到了一個小問題,即Rotation矩陣三列歸一化的時候都是除以第一列矩陣的Norm,當時自己實現的時候沒有發現,誤用了三列各自的Norm,結果一直沒有找到錯誤,後來參考了[2]的程式碼才得以解決。
函式的輸出一個是Translation 向量,另一個是Rodrigues變換之後的向量,該向量的方向代表旋轉軸,模代表旋轉的角度,具體數學表示見參考[3].
函式中的輸入Homography矩陣,可以用cvFindHomography求出。至於如何從特徵點求得Homography可以參考opencv2.0裡find_obj例程的下面這段程式碼:
- if( !cvFindHomography( &_pt1, &_pt2, &_h, CV_RANSAC, 5 ))
- return 0;
下面是上面這個函式的一個應用,也是正在進行中的一個工作:(sigh, csdn部落格竟然不支援嵌入式視訊功能。。。太不給力了,真的是要找下家了。。)
牆內的youku視訊正在上傳。。。這裡上傳好慢。。。
視訊是一個移動機器人在遙控器控制下用BumbleBee2立體攝像頭拍的一段視訊處理後的結果。
下面是iRobot機器人平臺,低角度拍攝很是霸氣哈哈。上面有很多感測器,我只用了BumbleBee2:

目前的話,還有兩個問題:
1. 一個由於SURF點是每個frame都要重新計算的,因此計算出來Homography矩陣不一定準確,表現在視訊上的話會產生對映的抖動(見視訊mapping的框),而且在特徵點比較少的時候,這種抖動尤為明顯(可以見當機器人從室內轉到走廊這段,由於走廊的SURF點明顯減少,對映框劇烈抖動)。這種抖動用optical flow應該可以解決。不過在目前應用中應該也不是特別大的問題,而且個人認為這種連續性需要到scene understanding這個更高的層次解決,而不是死摳這裡一些只關注細節的方法。
2. 另外一個問題是關於Rotation向量的,從這段視訊中可以提取出50個連續的場景(目前程式裡不同場景的定義兩個場景之間匹配的SURF點小於整個場景SURF點的1/8,這個引數是可調的),不同場景之間的旋轉和平移量見下圖:
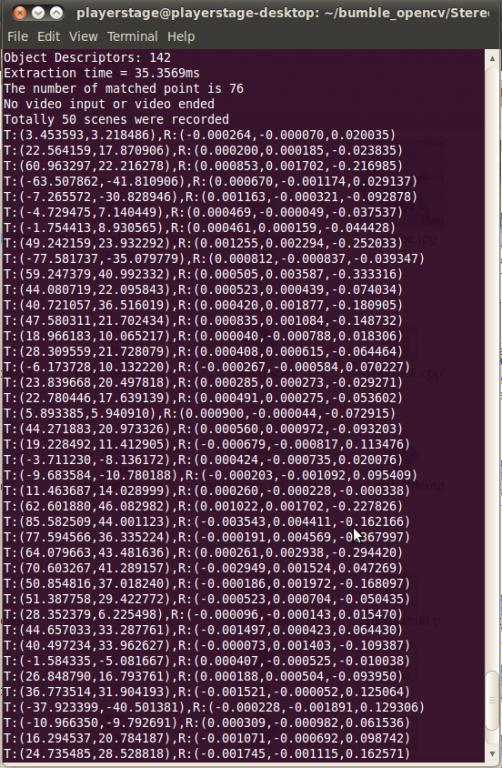
可以看出場景之間的切換基本都是Translation(T向量的z都是1,所以我省略了), Rotation的量很小(最大也只不過是0.2弧度左右),這與機器人在場景裡面的運動相符
但是可以看Rotation向量,計算出來的值似乎是顯示所有的旋轉都是繞著第三個量也就是Z軸進行的,而在實際過程中,旋轉似乎是主要繞著Y軸進行的。
當然根據這個結果我們可以大致繪製出機器人的行進路線圖,背後的原理似乎還有點那麼不通,感覺這是由於我對於Affine Space和Othodogical Space沒有完全理解導致的。求高人解答。
*******************************************************************
剛剛去問了老師。。。整個徹底錯了。。。立體的場景不是一個平面,中間的點是不能用Homography來對映的,這個地方是需要用Fundamental矩陣的。這也是為什麼Homography抖動以及求出Rotation Translation有誤的原因。
基礎不牢,地動山搖,本文權當反面教材吧。
********************************************************************
再補充20110525:
經驗證 利用寬鬆限制(比如允許誤差在10畫素以內)的RANSAC求Homography是可以粗略篩選outlier匹配對的,效果比用RANSAC做FindFundmental好。因為Homography在兩幅視圖裡是點對應,而Fundamental在兩幅視圖裡是點和極線對應
_________________________________________________________________
Reference:
[1]. Chapter 11, Learning OpenCV: P384-P391
[2]. https://gist.github.com/740979
[3]. http://opencv.willowgarage.com/documentation/camera_calibration_and_3d_reconstruction.html#rodrigues2