
三維重建——座標系變換
轉載自:https://blog.csdn.net/Peng___Peng/article/details/51510668
僅做參考資料用。
為了方便自己記憶,記錄一下三維座標旋轉矩陣的推導過程。
座標的旋轉變換在很多地方都會用到,比如機器視覺中的攝像機標定、影象處理中的影象旋轉、遊戲程式設計等。
任何維的旋轉可以表述為向量與合適尺寸的方陣的乘積。最終一個旋轉等價於在另一個不同座標系下對點位置的重新表述。座標系旋轉角度θ則等同於將目標點圍繞座標原點反方向旋轉同樣的角度θ。
若以座標系的三個座標軸X、Y、Z分別作為旋轉軸,則點實際上只在垂直座標軸的平面上作二維旋轉。但是需要改一下,讓每一個旋轉的座標軸都朝向同一個方向,根據右手定則,在這裡所有的旋轉軸都是朝向裡面。。而且都是逆時針方向旋轉的。
假設三維座標系中的某一向量
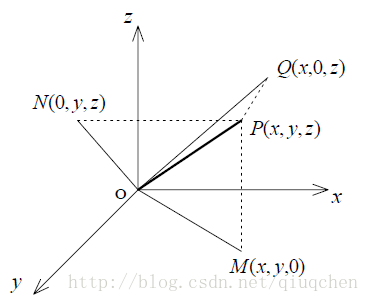
圖1 直角座標系XYZ
一、
繞Z軸旋轉,相當於
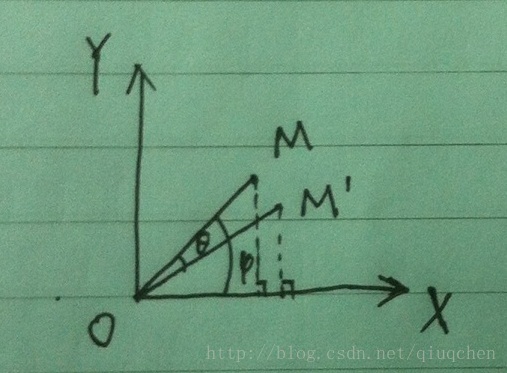
圖2 向量繞Z軸旋轉示意圖 (這張圖有點小錯誤,根據右手定則,讓Z軸朝向裡面了,所以Y軸朝上。但是這三個旋轉軸應該統一設定朝外面,所Y軸是朝下的)
設旋轉前的座標為



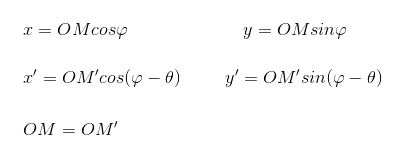
對於


且有

二、
繞X軸旋轉,相當於
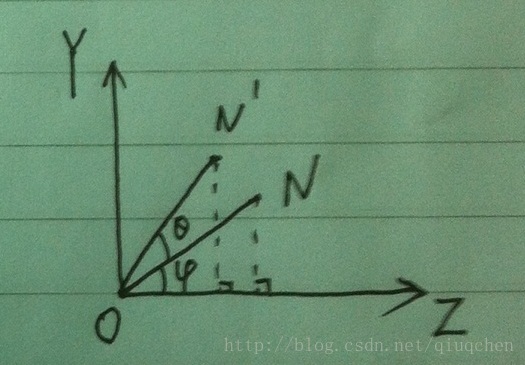
圖3 向量繞X軸旋轉示意圖
設旋轉前的座標為
。由此可得:

對於和

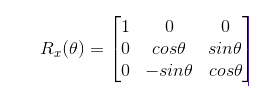
且有;可得繞X軸旋轉
三、
繞Y軸旋轉,相當於
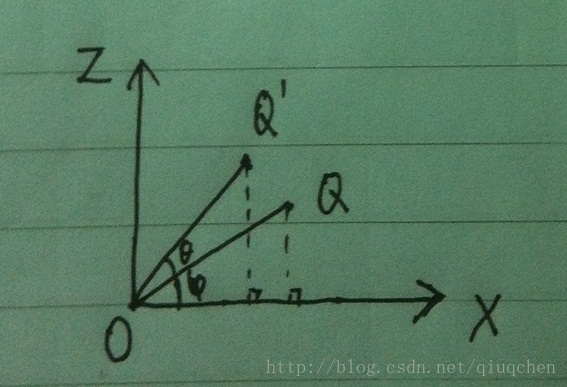
圖4 向量繞Y軸旋轉示意圖
設旋轉前的座標為,點Q'的座標為
。由此可得:

對於和
進行三角展開可得:

且有;可得繞Y軸旋轉
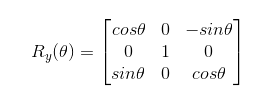
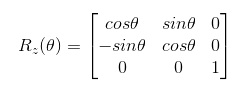
四、繞X、Y、Z軸旋轉的旋轉矩陣分別為:

五、總結
囉囉嗦嗦終於打完所有的公式了,其實三個軸會推導其中一個軸的旋轉矩陣的話,另外兩個軸也類似地可以很容易推匯出來。這裡給出所有的推導過程只是為了我自己記憶的方便。當然也可以不旋轉向量,而使用旋轉座標系的方法推導,兩種方法是等價的。