
影象處理之Non-Local Means(NM) 非區域性均值
1、非區域性均值去噪是空域濾波的一個重大突破,它利用自然影象的冗餘,基本思想是:當前畫素點的灰度值與影象中所有與其結構相似的畫素點加權平均得到。如何衡量結構相似的畫素點,也即如何確定權值係數?其做法是:對於每一個畫素點的權值,採用以該畫素點為中心的影象子塊(7*7)或(9*9)與當前畫素點為中心的子塊之間的高斯加權歐氏距離來計算。
參考:
A. Buades, B. Coll, J.M. Morel “A non local algorithm for image denoising” IEEE Computer Vision and Pattern Recognition 2005, Vol 2, pp: 60-65, 2005.
參考自:http://blog.csdn.net/bluewind_1988/article/details/7945302
2、非區域性均值去噪演算法其實很簡單,該種去噪方法和高斯去噪和雙邊濾波器去噪很像,都是利用一些準則,通過“周圍”的畫素點加權估計畫素點的真實值,如下圖所示:
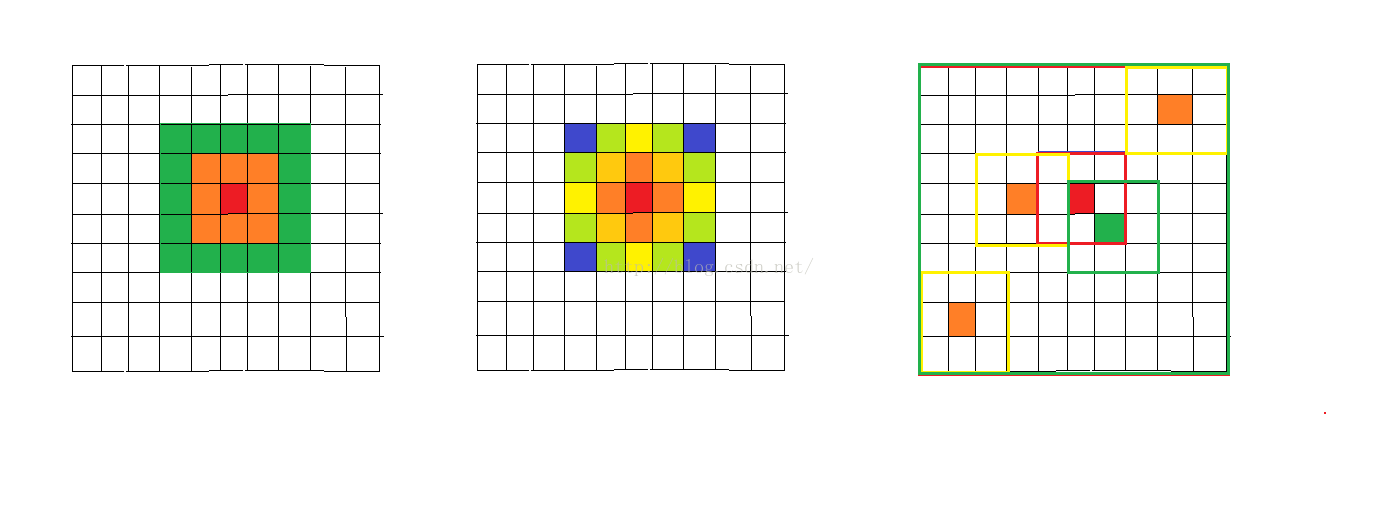
最左邊一副圖表示Gauss濾波的特點,就是利用影象畫素點相近的程度來估計權重,中間幅圖表示雙邊濾波器在考慮畫素點本身取值的相近性以外,還考慮了相近畫素點與被估計的畫素點的距離,如果離被估計的畫素點越近將具有更高的權重,非區域性均值則是在一個視窗中搜索相近的影象塊來進行權重分配(如綠色的框內的區域為搜尋的區域,黃色的視窗為搜尋的影象塊,深褐色的視窗中的中心點為需要去噪的點,通過加權的形式將最相近的幾個畫素塊中的中心點結合起來估計真實值。
參考自:http://blog.csdn.net/hit1524468/article/details/51417696
3、非區域性均值濾波 nonlocal mean filter:
非區域性均值濾波是Buades等 在2005年提出的一種濾波方法。其基本思想是根據影象的自相似性來計算鄰域畫素的權重。
NML演算法首先需要選取兩個窗,分別為相似窗和搜尋窗,相似窗被選取用於比較兩個畫素的相似性,搜尋窗被選擇用於確定計算相似畫素的範圍。中心畫素i與其鄰域的畫素j之間的相似性權重是根據兩畫素相似窗高斯加權的歐式距離決定,公式如下:
非區域性均值濾波有與雙邊濾波相比,非區域性均值根據具有一定大小的影象片之間的相似性來決定兩畫素的相似性,較雙邊濾波可以更好的識別影象的細節。但非區域性均值演算法的濾波引數h比較難調,h控制衰減的速度,如果沒有過大的衰演算法會退化為均值濾波,過小的衰減演算法又會沒有平滑效果,一般h引數的選擇會參照影象噪聲的標準差。
參考自:http://blog.csdn.net/numit/article/details/46842589