
多相機顏色校正演算法之一---基於LM演算法的顏色變換引數求解
- 問題背景
在多視角視訊系統中,會用多個相機拍攝同一個場景。但是因為不同相機之間的特性引數不一樣,會產生色彩一致性(color consistency)和色感一致性(color constancy)的問題。由於色感是人的主觀感受,不易進行量化比較。所以這裡只解決色彩不一致性的問題。
如下圖所示,左右兩張圖片就出現色彩不一致的問題。

顏色校正模型
相機有很多固有引數,這些引數會影響到拍攝到的畫面呈現出的色彩。其中主要影響的有三個元素。
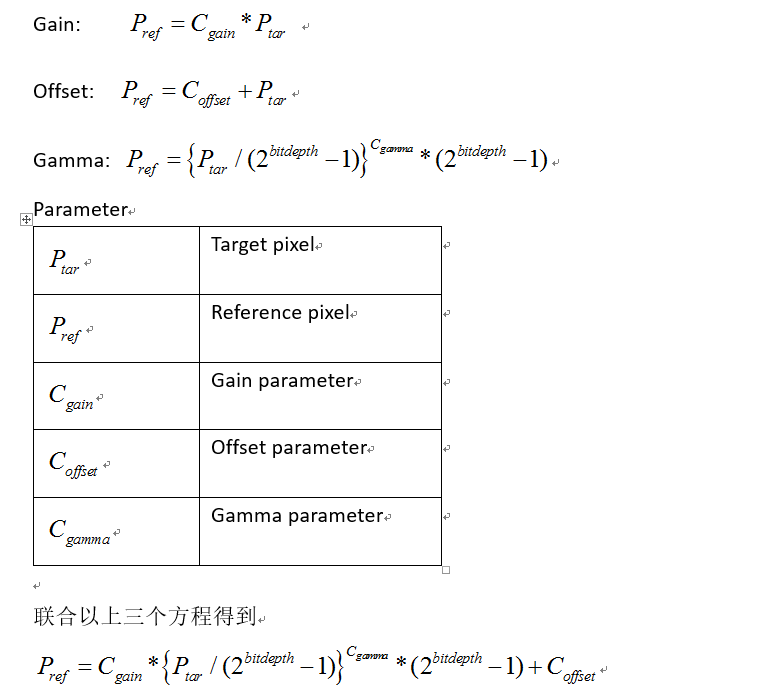
求解出Gain, offset,gamma三個引數,就可得到校準計算公式。
迭代求解及優化
採用LM演算法即可解出方程引數。
Step1:用sift特徵描述子,計算對應的畫素點

- 結果

相關推薦
多相機顏色校正演算法之一---基於LM演算法的顏色變換引數求解
問題背景 在多視角視訊系統中,會用多個相機拍攝同一個場景。但是因為不同相機之間的特性引數不一樣,會產生色彩一致性(color consistency)和色感一致性(color constancy)的問題。由於色感是人的主觀感受,不易進行量化比較。所以這裡只
使用python做遺傳演算法與基於遺傳演算法的多目標演算法
遺傳演算法 建立GeneticAlgorithm.py import numpy as np from GAIndividual import GAIndividual import random import copy import matplot
【C++實現】五大常用演算法之一:分治演算法(例項:漢諾塔)
求解思想:大而化小 1、問題拆分成子問題 2、對子問題求解 在漢諾塔遊戲中,有三個分別命名為A、B、C得塔座,幾個大小各不相同,從小到大一次編號得圓盤,每個原盤中間有一個小孔。最初,所有得圓盤都在A塔座上,其中最大得圓盤在最下面,然後是第二大,以此類推. 先上程式
五大常用演算法之一:分治演算法(轉)
分治演算法 一、基本概念 在電腦科學中,分治法是一種很重要的演算法。字面上的解釋是“分而治之”,就是把一個複雜的問題分成兩個或更多的相同或相似的子問題,再把子問題分成更小的子問題……直到最後子問題可以簡單的直接求解,原問題的解即子問題的解的合併。這個技巧是很多高效演算法的基礎,如排序演算法(快速排序,
五大常用演算法之一:分治演算法(轉載)
轉載自:http://www.cnblogs.com/steven_oyj/archive/2010/05/22/1741370.html 一、基本概念 在電腦科學中,分治法是一種很重要的演算法。字面上的解釋是“分而治之”,就是把一個複雜的問題分成兩個或更多的相
從執行上下文角度重新理解.NET(Core)的多執行緒程式設計[1]:基於呼叫鏈的”引數”傳遞
執行緒是作業系統能夠進行運算排程的最小單位,作業系統執行緒進一步被封裝成託管的Thread物件,手工建立並管理Thread物件已經成為了所能做到的對執行緒最細粒度的控制了。後來我們有了ThreadPool,可以更加方便地以池化的方式來使用執行緒。最後,Task誕生,它結合async/await關鍵字給與我們完
【原始碼】NSGA - II:一種基於進化演算法的多目標優化函式
NSGA-II是一種著名的多目標優化演算法。 NSGA-II is a very famous multi-objective optimization algorithm. 相應的函式為nsga_2(pop,gen)。 The function is nsga_2(pop,g
sba(sparse bundle adjustment):一個基於Levenberg-Marquardt(LM)演算法的通用稀疏光束法平差C/C++軟體包
如果你來到這個頁面來尋找一個通用的Levenberg-Marquardt演算法的C/C++實現,請看levmar 引言: 本頁面是關於sba,一個通用的稀疏光束法平差的C/C++軟體包。它基於GNU通用公共許可證GPL分發的。光束法平差(BA)是作為每個基於特徵的多視重建視覺演算法的最後一步,用來獲得最佳的
PS圖層混合演算法之一(不透明度,正片疊底,顏色加深,顏色減淡)
下列公式中,A代表了上面圖層畫素的色彩值(A=畫素值/255),B代表下面圖層畫素的色彩值(B=畫素值/255),C代表了混合畫素的色彩值(真實的結果畫素值應該為255*C)。該公式也應用於層蒙板。 不透明度模式: C=d*A+(1-d)*B 相對於不透明度
基於GPU的多相機拼接全景技術
全景視訊拼接關鍵技術 一、原理介紹 影象拼接(Image Stitching)是一種利用實景影象組成全景空間的技術,它將多幅影象拼接成一幅大尺度影象或360度全景圖,影象拼接技術涉及到計算機視覺、計算機圖形學、數字影象處理以及一些數學工具等技術。影象拼接其基本步
基於openCV3的顏色通道分離及多通道影象混合
注:文件摘至《OpenCV3程式設計入門》毛星雲版 <1>通道分離: split()函式 split函式用於將一個多通道陣列分離成幾個單通道陣列。這裡的array 按語境翻譯為陣列或者陣列。split函式的C++版本有兩個原型, 分別是:
VS2017+OpenCV3.3基於SGBM演算法的雙目立體視覺、雙目測距(雙目校正和立體匹配)
前些日子做了一個關於雙目立體視覺的入門作業,現在在這裡總結一下學到的一些知識(寫的可能會有很多欠缺的地方,還望海涵!) 本篇部落格不涉及雙目標定的知識,關於雙目標定網上資料很多,大家可以自行查詢學習。 先說一下本部落格的雙目立體視覺的實現基礎,已知以下資訊:
基於顏色的粒子濾波器目標跟蹤演算法的原理(A color-Based Particle Filter)
粒子濾波器的主要步驟就包括五步: 第一步 :生成初代粒子集合 第二步 :讓粒子集合在狀態空間轉播(Propagate):對應於系統動態方程 第三步 :獲得當前時刻的觀測
徐鬆亮演算法教學-基於C語言的數獨(九宮格)求解(含多解和解數統計)
目錄 一,前言 電腦系統 編譯器 程式語言 流程 演示 一,前言 數獨,說實話我玩過,且並不是很喜歡玩,覺得無聊也太浪費時間,當然玩的水平也不咋樣。 但是我為什麼又寫這篇文章又編寫程式碼的去做呢? 因
命令行顏色換算器(基於python)
documents image document class clas profile 修改 span eight import sys print(hex(int(sys.argv[1])<<16|int(sys.argv[2])<<8|int(
聚類演算法之DBSCAN演算法之一:經典DBSCAN
DBSCAN是基於密度空間的聚類演算法,與KMeans演算法不同,它不需要確定聚類的數量,而是基於資料推測聚類的數目,它能夠針對任意形狀產生聚類。 1.epsilon-neighborhood epsoiln-neighborhood(簡稱e-nbhd)可理解為密度空間,表示半徑為e
基於遺傳演算法的波浪能園區佈局設計
本文是愛思唯爾海洋工程的一篇論文,主要是採用遺傳演算法對波浪能發電園區的佈局設計。 本文提出了一種基於遺傳演算法的波能陣列優化設計工具,首先對單點波能轉換器的內部引數(浮標半徑、吃水深度和發電機阻尼)進行了優化,此外,由於波浪能園區內的一些波能裝置會通過波浪間相互作用而相互影響,因此該工具還研究了具有不同裝
線性迴歸實現顏色校正
在寫方程和程式碼之前還是先上定妝照吧,不然看了一大堆方程和程式碼,結果垃圾這不是耍流氓嘛~~ 使用的標準色卡: 手機拍攝的色卡和校正後的影象: 可以看到校正後的影象顏色明顯鮮豔了許多,不過白色的偏差略大了點,不過夠用了。so…… 看看方程還是值得的 哈哈 ==============
雜湊學習演算法之一:ANN背景介紹
一、由ANN進入Hash NN,即最近鄰(nearest neighbor),定義在一個數據集X中,查詢點q的最近鄰是NN(q)=argmin dist(q,x) 其中x∈X。直接的表示,即為KNN查詢,也就是需要找到K個最近鄰。一個點x和查詢點q的距離取決於具體的查詢問題。例如:d維空
$Django 多表操作(增刪改查,基於雙下劃線的查詢)
1 建立多表模型(詳情見程式碼) #用了OneToOneField和ForeignKey,模型表的欄位,後面會自定加_id class Zuozhe (models.Model): id = models.AutoField (primary_key=True)