
基於顏色的粒子濾波器目標跟蹤演算法的原理(A color-Based Particle Filter)
阿新 • • 發佈:2019-02-08
粒子濾波器的主要步驟就包括五步:
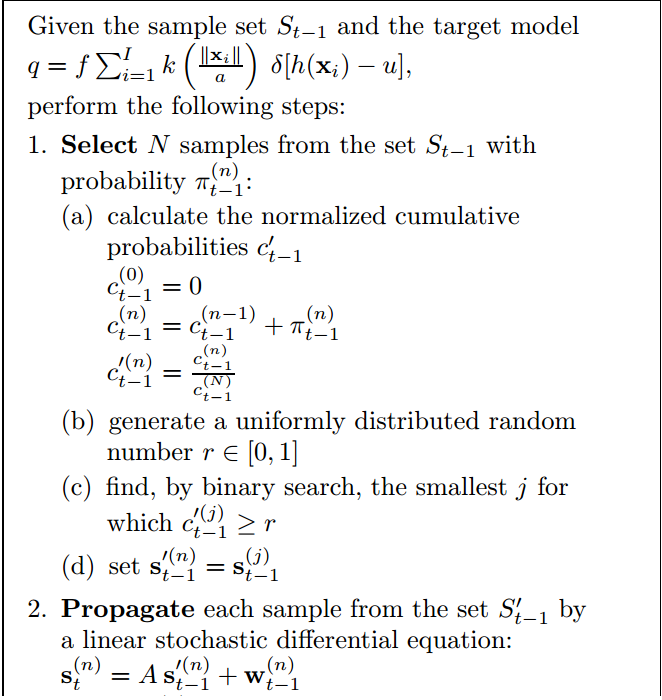
第一步 :生成初代粒子集合
第二步 :讓粒子集合在狀態空間轉播(Propagate):對應於系統動態方程
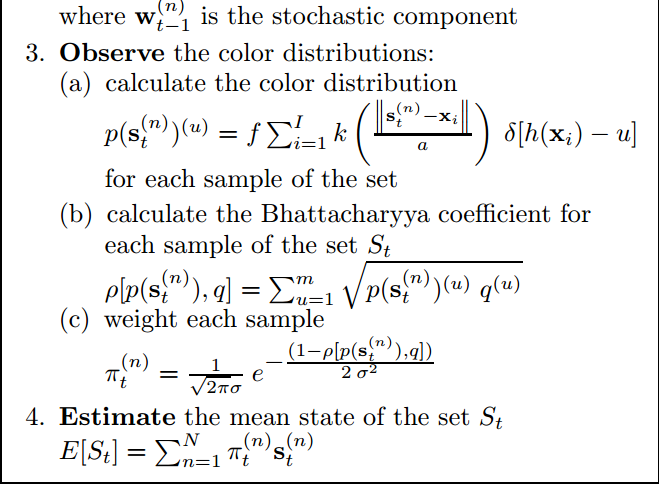
第三步 :獲得當前時刻的觀測,並根據觀測更新粒子權重:對應於觀測方程
第四步 :估計當前狀態的均值統計量
第五步 : 重取樣,獲得當前時刻的新一代粒子集合。然後回到第二步繼續。
細節資訊如下所示:(木有翻譯,主要是怕拿捏不準,誤人子弟,\(^o^)/~)
顏色分佈特徵的好處:對部分遮擋魯棒,對旋轉和尺度不明感,計算簡單方便。
每個粒子的狀態就是在目標周圍取的一些矩形框的位置座標以及矩形框的長和寬(這是零階模型),如果是一階模型,那麼狀態裡面還要包括矩形框的移動速度,長和寬的變化率。
每個粒子的觀測值就是該粒子所在區域的影象顏色特徵直方圖(加權的)。
每個粒子的在其狀態下的權重就是該粒子的矩形區域的顏色直方圖與目標的顏色直方圖的巴氏係數。通過計算某個粒子與目標的直方圖的巴氏距離,並且假定所有粒子與目標的巴氏距離服從高斯分佈,則會有下式出現:

上式中的計算結果就是下次粒子集合重取樣的概率,被稱為接受概率。,而Sigma則是觀測噪聲。
根據我的程式觀察,發現把狀態估計放在重取樣之後,跟蹤框會更加穩定一些啊。
下面是本博主看到的其他一些有趣的解釋,不防也看看吧:
關於粒子濾波器的介紹,請看我之前的博文!
在後續博文中我會把我寫的程式碼分享出來,供大家參考學習,\(^o^)/~!!!