
David Silver強化學習課程筆記(五)
第五課:模型無關的控制
本文主要介紹模型無關的控制,包括同策略方法(On-Policy,也譯作“在策略”)和異策略(Off-Policy,也譯作“離策略”)方法,由於是模型無關,因此本文聊的是學習(learning),而不是規劃(planning)。
1.簡介
在第一課中我們說到了預測和控制的區別,這裡就不再贅述,下面我們主要聊一下同策略方法和異策略方法這兩個概念。同策略學習指的是“ Learn on the job ”,確切的說就是用於取樣的策略和我們要學習的策略一致;異策略學習指的是“ Look over someone's shoulder ”,也即我們想要學習的是一個策略,而用於取樣的是另一個策略,舉個簡單的例子,我們想要學習到一個確定性策略,比如利用greedy方法得到的策略,我們直接用該策略進行取樣並不會引入探索,但是我們想要對各個動作和狀態進行探索,那我們就可以使用一個隨機策略進行取樣,比如epsilon-greedy得到的策略。當然,我們的異策略方法不僅僅可以用於引入探索,還可以產生引導樣本,比如我們想要機器人完成抓取任務,可以先讓專家給出示教軌跡樣本,並利用該樣本對抓取策略進行學習,從而有效地減少所需要的樣本數量。
2.同策略蒙特卡羅控制
在第三課中我們說到了策略迭代方法,下面我們先來回顧一下:

我們第三課的主題是利用動態規劃進行"規劃",也即基於模型的方法,那我們如何將策略迭代方法拓展到"學習"這一問題上呢?
策略迭代包括兩個部分,策略估計和策略改進,其中策略估計用的是貝爾曼期望方程,策略改進用的是greedy方法。既然我們要將其變為模型無關的方法,那麼首先在策略估計中我們就不能使用貝爾曼期望方程,而是變為sample方法,比如MC方法或TD方法。假如我們選用MC方法對值函式進行估計,得到策略對應的狀態值函式V,然後利用greedy方法得到新策略:

雖然我們在使用MC方法對策略進行估計的時候沒有使用到模型,但是在上面的策略改進中需要知道模型的知識,即獎勵函式R和轉移概率矩陣P。因此我們並不能使用狀態值函式作為估計的物件。那動作值函式q呢?

如果我們已經完成了策略估計,那麼我們只需要求一個argmax即可對策略進行改進,所以我們的想法是正確的,可以使用q函式作為估計物件。
下面我們考慮策略改進,這裡先直接使用greedy方法,從下面的例子我們會看見,這時我們的策略迭代可能會陷入一個僵局:
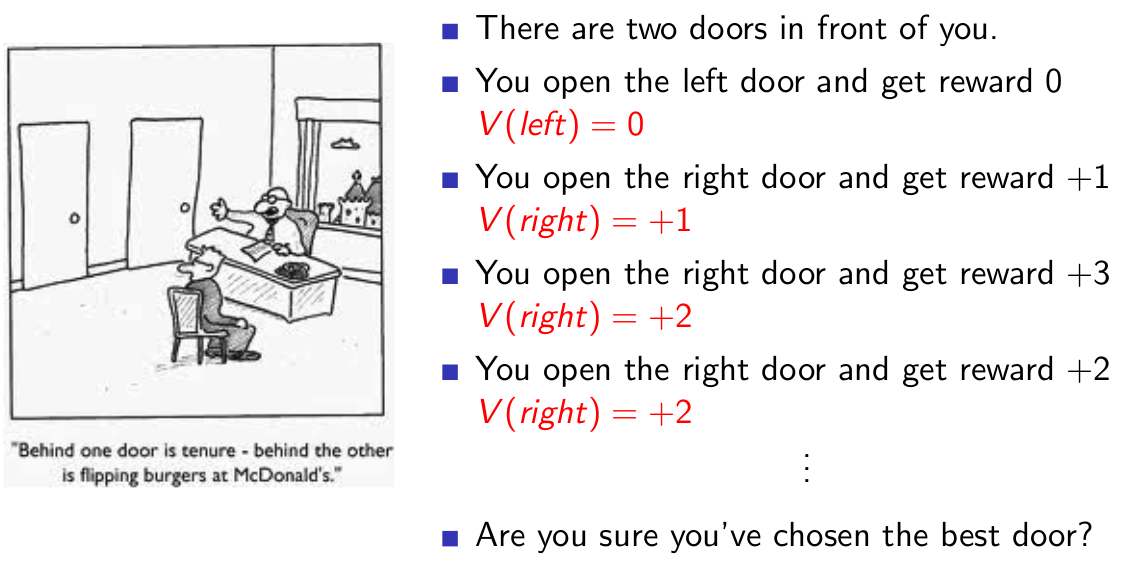
應聘者先打開了左邊的門,得到的獎勵為R=0,所以V(left)=0,然後打開了右邊的門,得到的獎勵為R=1,所以V(right)=+1,因為V(right)>V(left),所以應聘者會繼續開啟右邊的門,如果右邊的門獲取到的獎勵始終使得V(right)>V(left)成立,則應聘者再也不會開啟左邊的門,哪怕左邊的門中有很大的概率R=100,也即陷入了僵局。
從這個例子來看,如果我們引入對左邊門的探索,那麼,就可能探索到R=100的獎勵,也就選擇了回報更大的門。所以,學者們提出了epsilon-greedy方法:
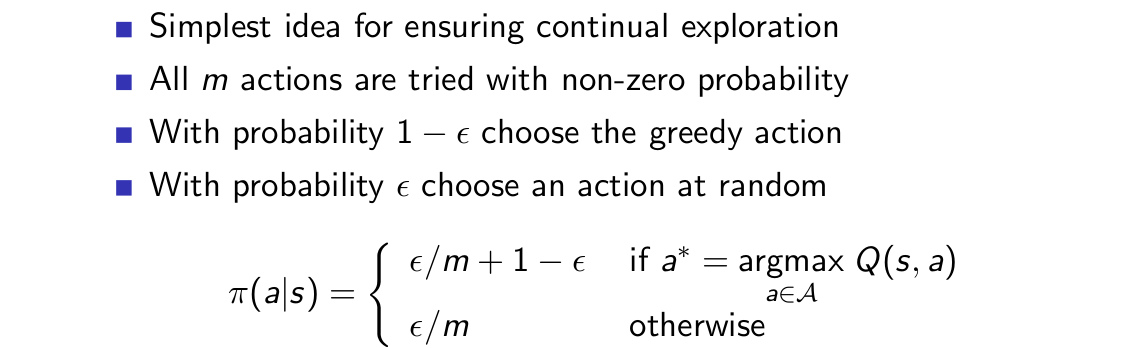
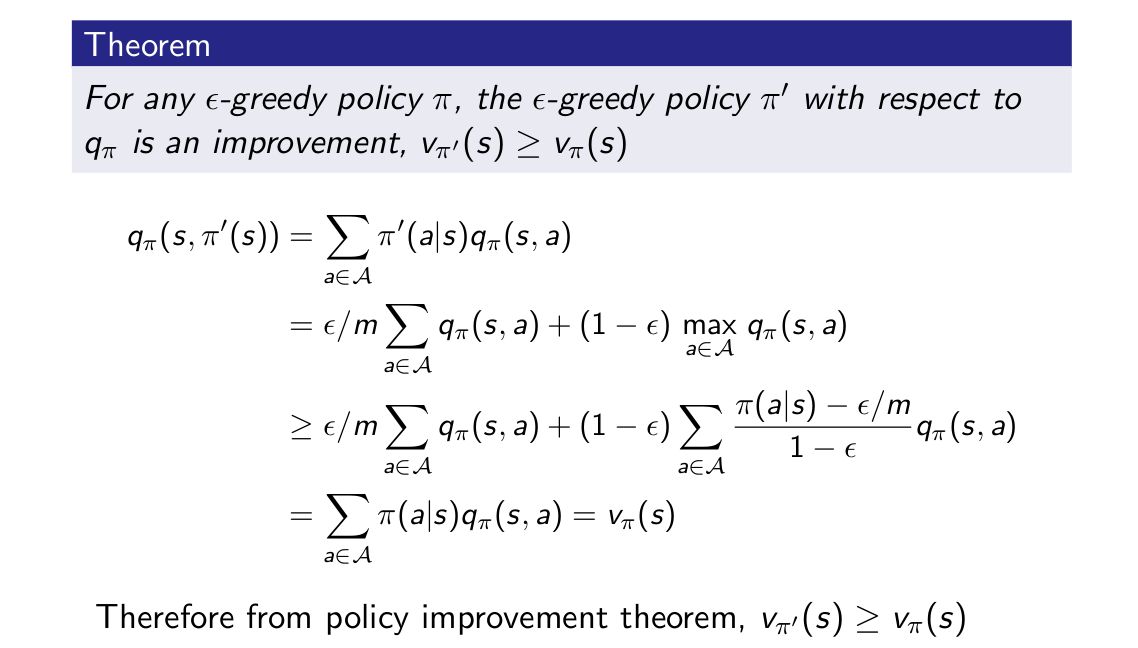
這是一種及其簡單的想法,它保證了在任何一個狀態下,所有動作都有可能被選擇,或者說,它能夠保證足夠的探索。同greedy方法一樣,我們可以很容易地證明epsilon-greedy方法總能對策略進行改進:
對上面的討論進行總結,我們可以得到蒙特卡羅策略迭代方法:
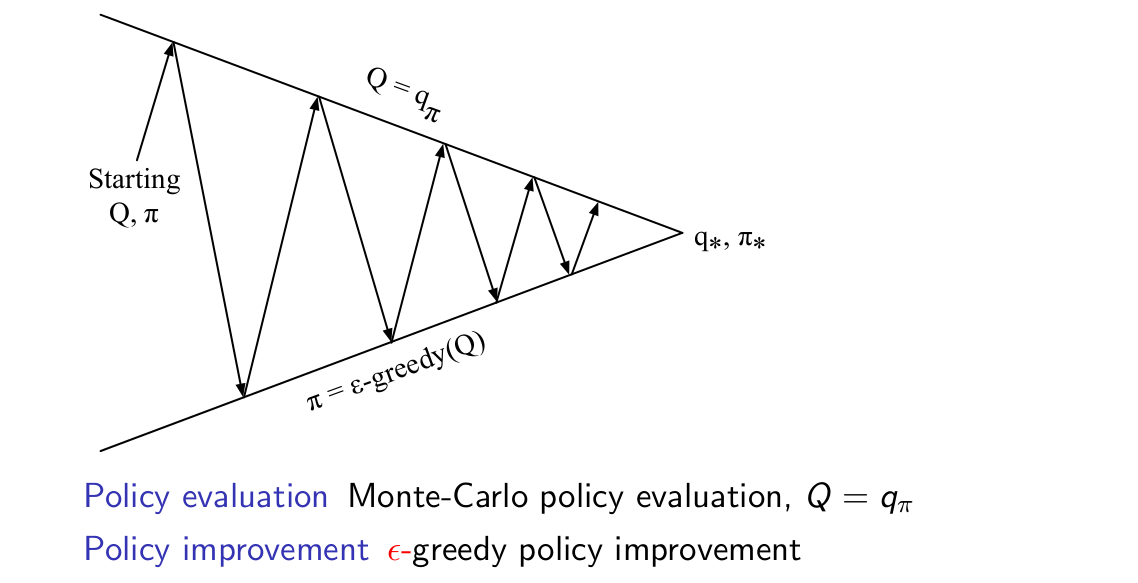
與我們在第三課中講到的策略迭代方法不一樣,MC策略迭代在估計中用的是q函式,在策略改進中用的是epsilon-greedy方法。在實際應用中,我們稱之為蒙特卡羅控制,且更確切地給出其迭代示意圖:

我們希望得到一個這樣的學習方法:
1)在學習開始時有足夠的探索;
2)最終得到的策略沒有探索,是一個確定性的策略。
這兩個特點讓我們引出了對於GLIE的定義:
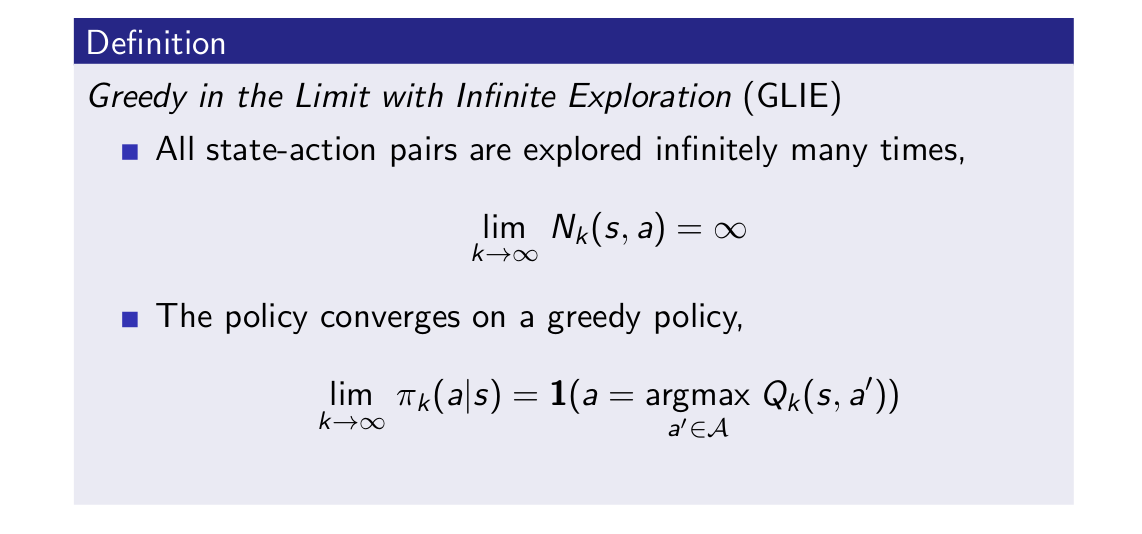
GLIE滿足兩個條件:
1)所有的狀態動作對都能夠被探索無數次;
2)策略最終收斂到一個greedy策略,也即確定性策略。
比如說,在epsilon-greedy中,如果探索因子epsilon等於1/k,則它是GLIE的。下面我們將GLIE引入到蒙特卡羅控制中:
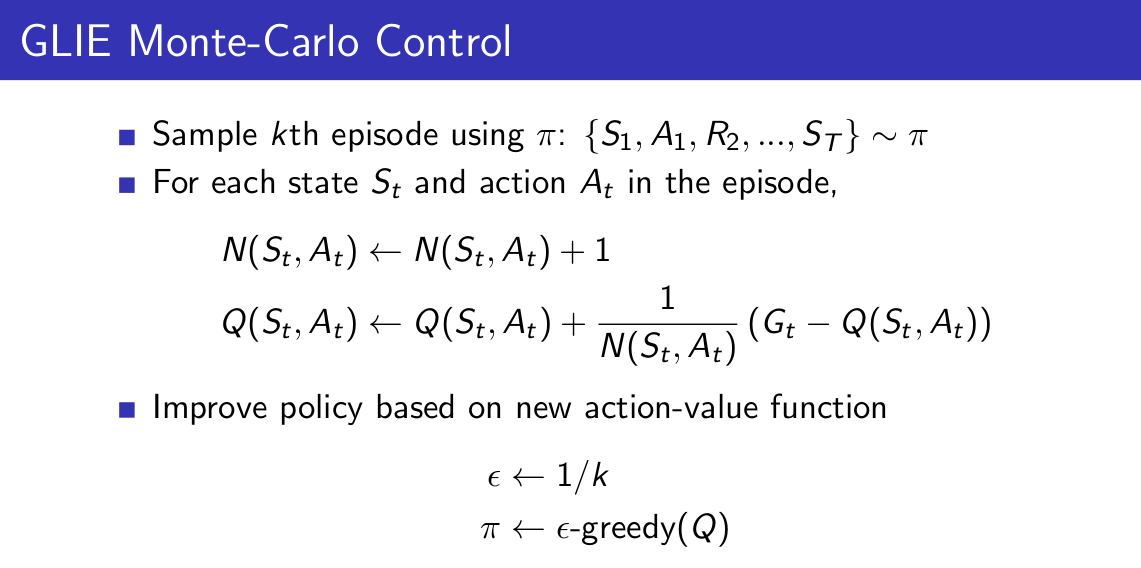
無非就是epsilon變為了1/k而已,其他並沒有什麼改變。對於GLIE蒙特卡羅控制的收斂性有如下定理:

2.同策略時間差分控制
在第四課中我們提到過,相對於MC方法而言,TD方法有著更低的方差,不需要完成整個episode就能對值函式進行更新,也就是說,可以在episode中的每一個timestep進行線上的值函式估計。說到同策略時間差分控制,一個很自然的想法就是,直接將同策略蒙特卡羅控制中對值函式估計的MC方法換為TD方法,然後將每一個episode對值函式更新一次換為每一個timestep更新一次。我們將這種方法叫做Sarsa,該名字的由來見下圖:
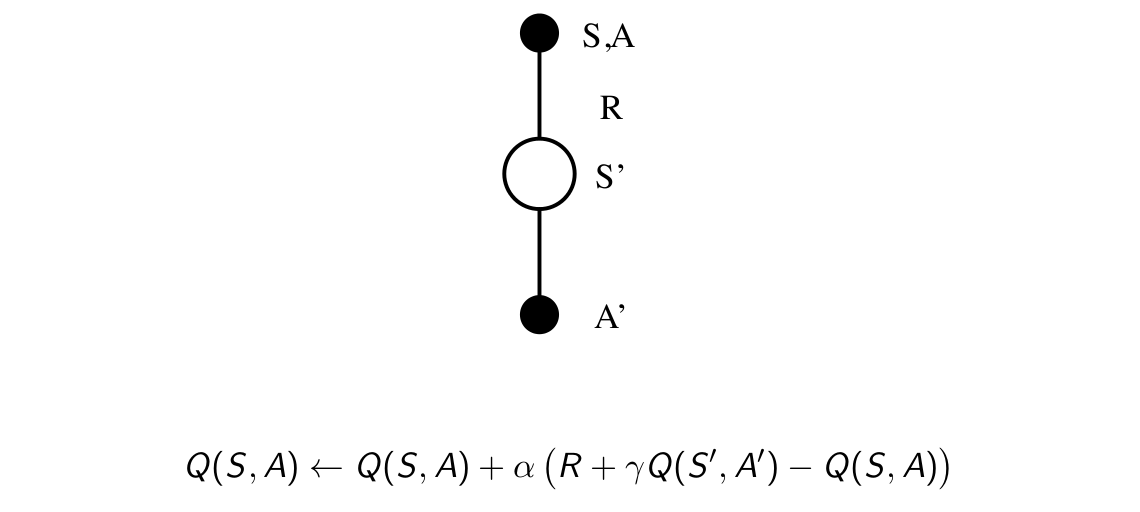
它的命名就是用影象右邊那一串字母命名的......它的迭代示意圖也很簡單:

再次強調一下,與同策略蒙特卡羅控制相比,修改了兩個地方,一是策略估計的方法改為了Sarsa,二是每個episode更新一次變為了每個timestep更新一次。下面給出該演算法的具體表述:
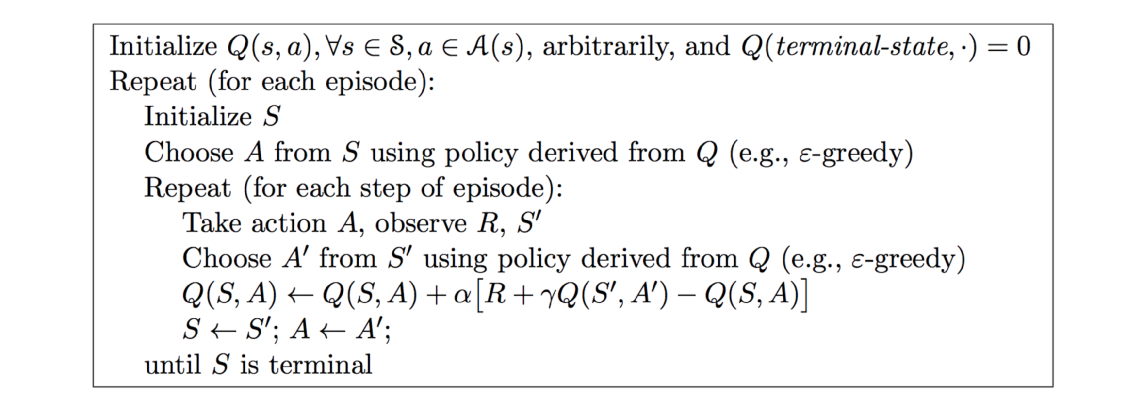
回顧我們前面說的同策略的定義,同策略也即”取樣的策略和我們想要學習的策略一致“,從上面看出,兩者都是對q函式利用epsilon方法匯出來的策略,因而是一致的。設計完演算法之後,總是要考慮一下收斂性的:
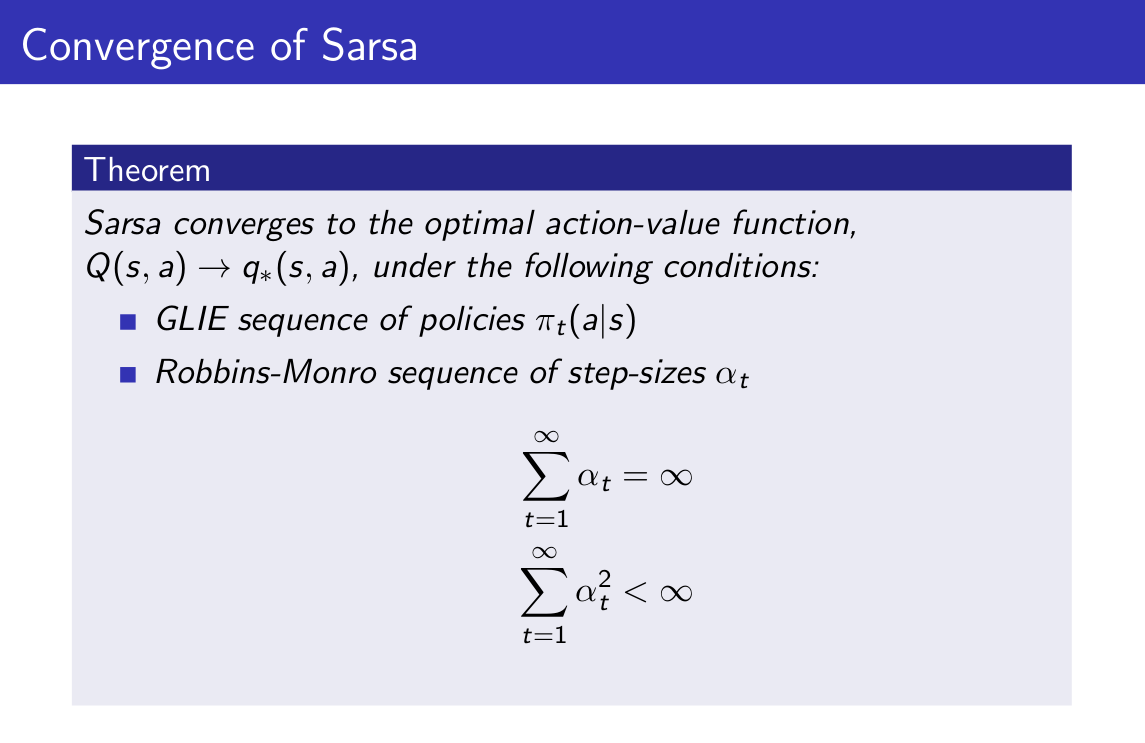
也就是說,如果我們在使用Sarsa方法的過程中,想要保證收斂,就必須要讓上面兩個條件成立,當然,在實際實現中,我們並不會真的去這麼嚴苛地要求其成立。解釋一下Robbins-Monro序列中的兩個條件分別是什麼含義,第一個式子表示從某個初始值開始,我們可以對值函式做出任意多的修正(累積起來很多),第二個式子表示我們對於值函式的修正將變得越來越小(單次修正越來越小)。
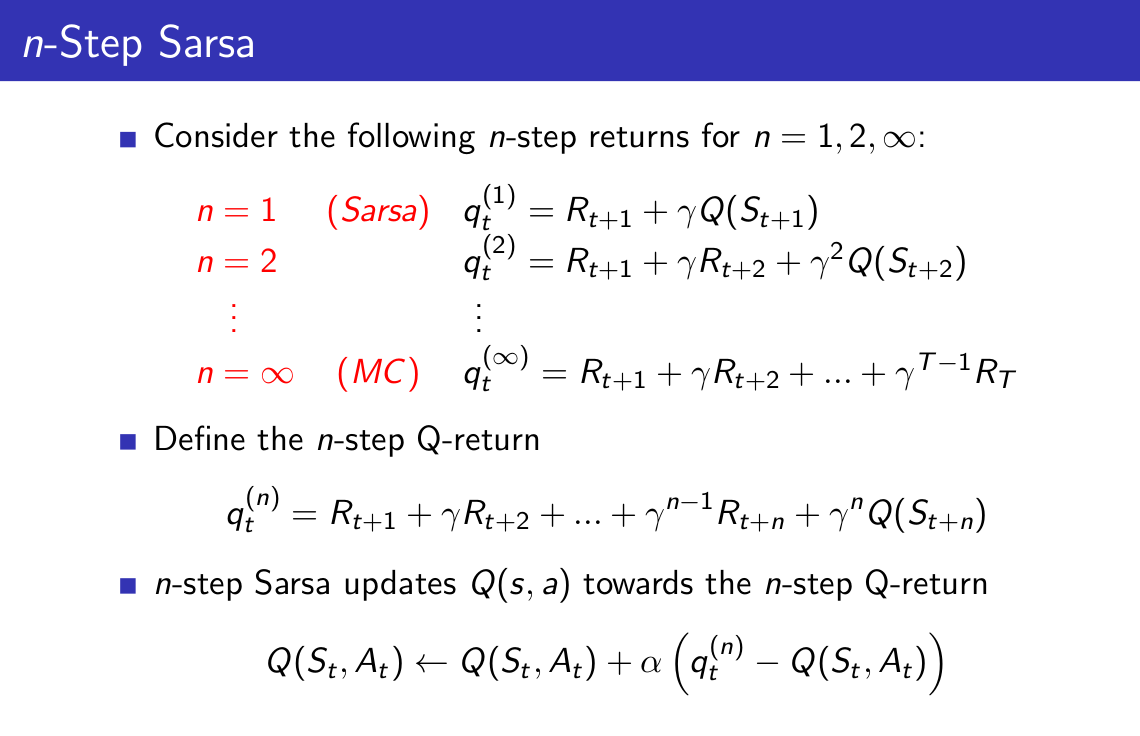
與一般的TD方法一樣,我們可以定義n-step Sarsa:
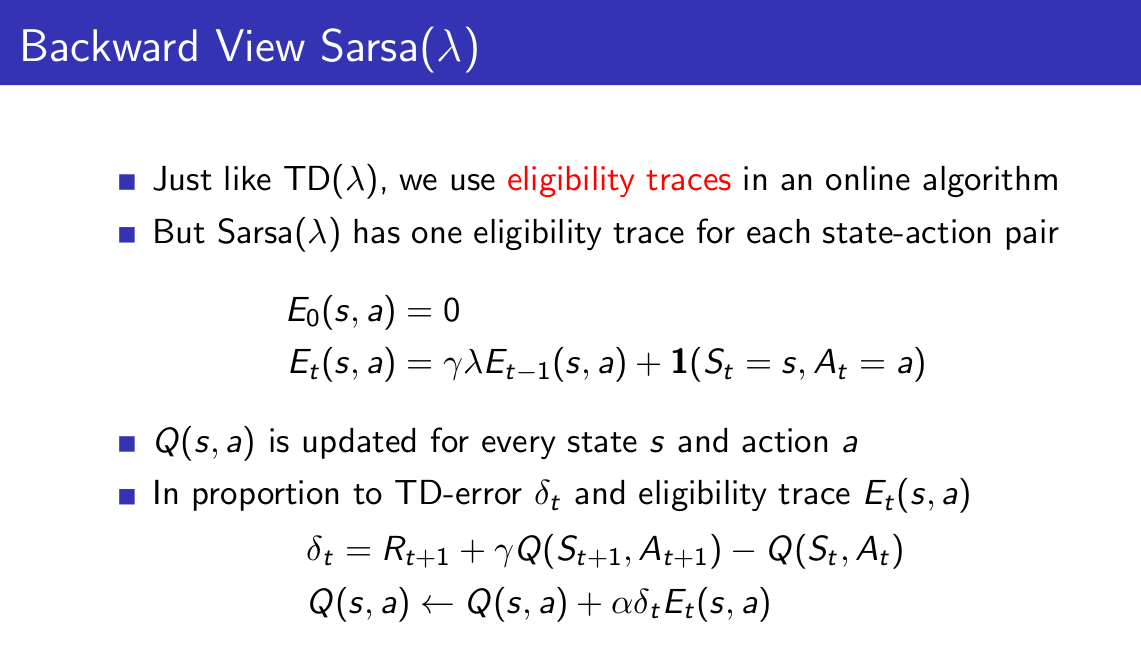
然後給出Sarsa(labmda)演算法:

因為是工程上實現,所以選用的是後向視角方法,在第四章中已經對前後向視角分別給出瞭解釋,不過畢竟是關於狀態值函式V的,所以這裡再給出兩種視角的具體說明,但不再給出解釋:

3.異策略學習
如前面所說,在異策略學習中,想要學習的是一個策略,而實際用於取樣的又是另外一個策略,這樣做有什麼好處呢?
1)可以從人類給出的示教樣本或其他智慧體給出的引導樣本中學習;
2)可以重用由舊策略生成的經驗;
3)可以在使用一個探索性策略的同時學習一個確定性策略;
4)可以用一個策略進行取樣,然後同時學習多個策略。
其中最為人所知的原因是第三點,也即可以在使用一個探索性策略的同時學習一個確定性策略,Q-learning演算法便是一個很好的例子。在具體介紹異策略學習方法之前,我們先給出重要性取樣的定義:
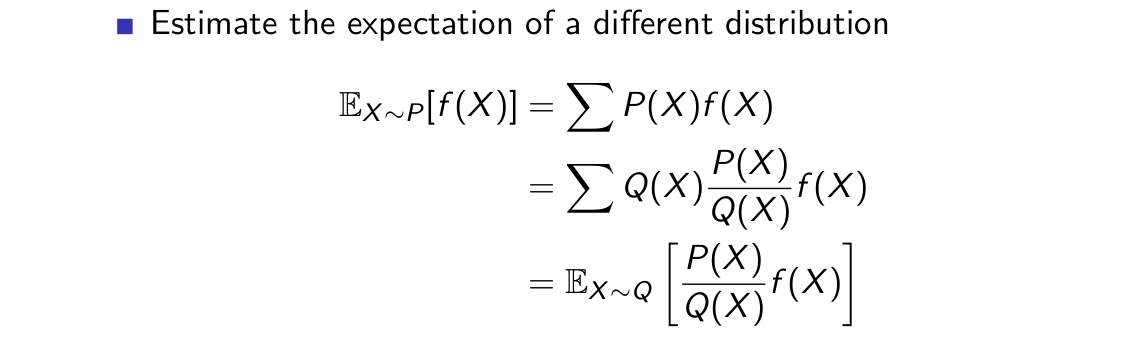
可見,重要性取樣實質上是按照兩個概率分佈對函式進行了加權,關於重要性取樣的具體介紹可以參考這篇部落格:取樣方法。
下面我們將重要性取樣與MC方法和TD方法結合起來:
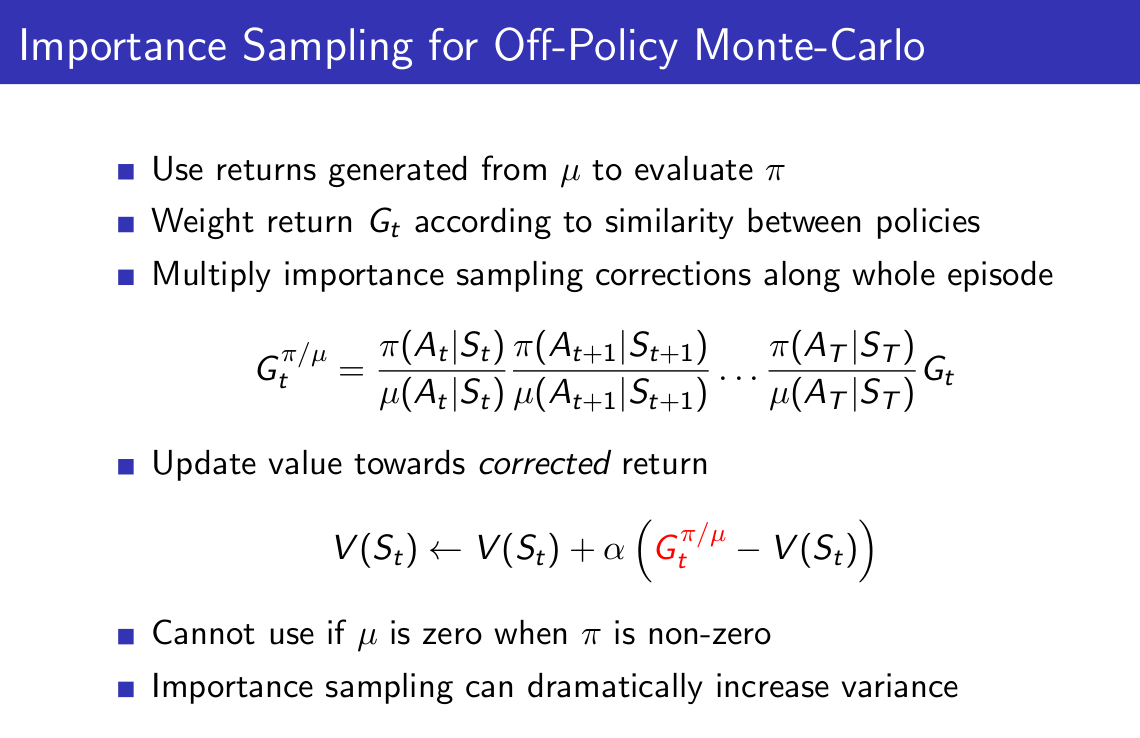
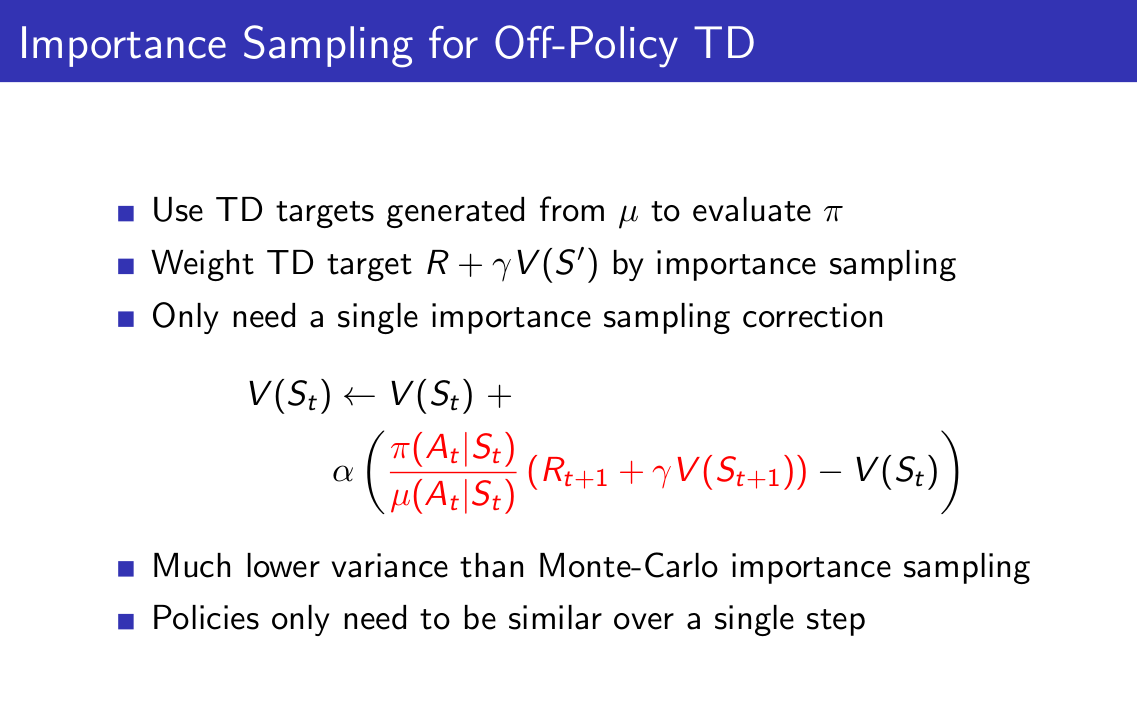
從上面兩張ppt可以看出,實質上是利用一個取樣策略得到的target來估計我們想要學習的策略。此外,我們知道,MC方法的方差本來就很大,而重要性取樣將會使得方差急劇增大,因此結合重要性取樣的MC方法就很難用了。對於TD方法來說,其方差本來就比MC要小得多,並且我們僅僅需要行為策略和目標策略在單個時間步上較為相似,因此其加權之後的方差也較小,所以這種方法的實用性較強。
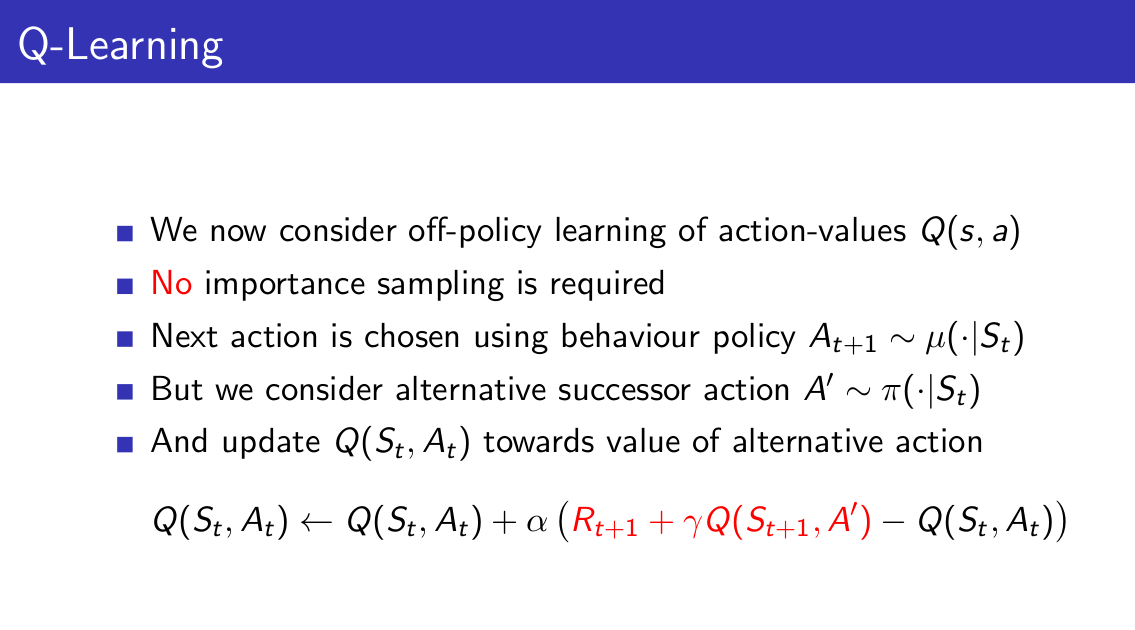
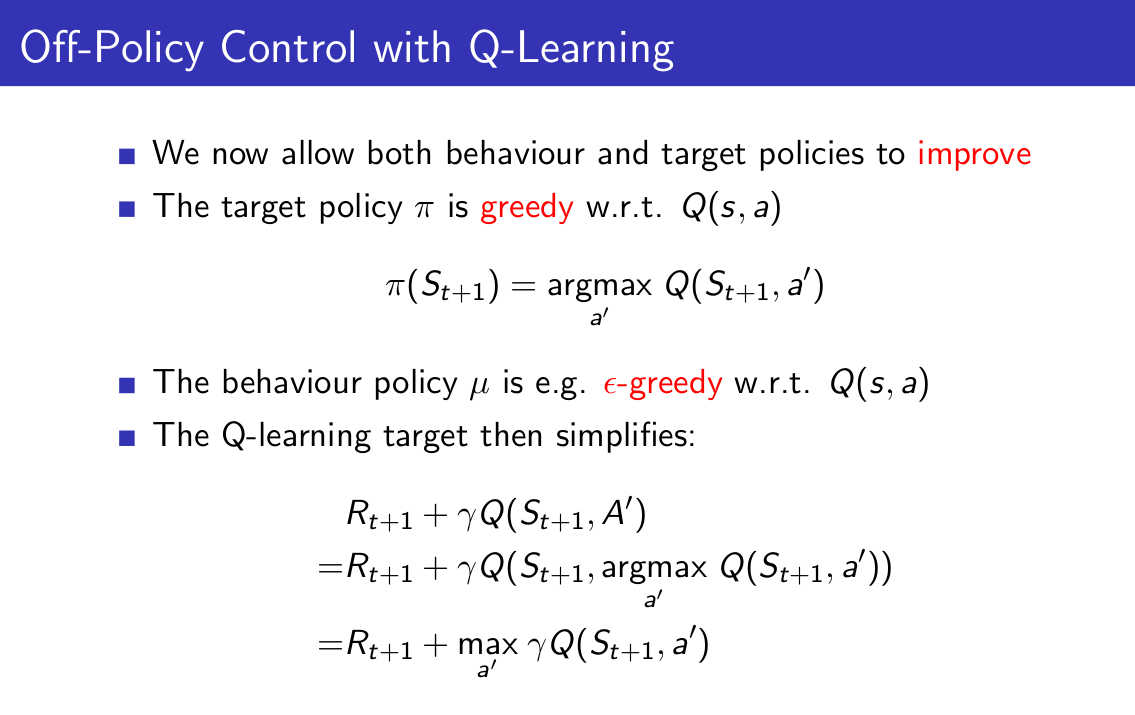
現在考慮Q-learning演算法,該演算法中的行為策略與目標策略是從同一個值函式q中學習得到,其中目標策略使用greedy方法得到,行為策略使用epsilon-greedy方法得到,因此,重要性取樣的因子pi/mu就有兩種情況了,對於某個狀態s,pi策略選擇動作a的概率要麼是1,要麼是0,當為1時,mu選擇該動作的概率也較大(因為epsilon一般比較小),所以pi/mu約等於1;當為0時,pi/mu=0。因此,雖然Q-learning是一種異策略演算法,它卻不需要重要性取樣因子了,或者說,不需要引入重要性取樣。給出Q-learning演算法的課程ppt供大家參考:
在Q-learning中,計算TD target使用的是我們期望的策略,也即貪婪策略,而選擇動作使用的策略是e-greedy策略。相當於,我們選擇(狀態,動作)對的時候,是引入探索的,而計算target的時候,是按照期望的貪婪策略進行的。事實上,這裡的Q(S, A')選用e-greedy之後,首先是通過對Q-estimate使用e-greedy來選擇動作A',然後又用Q-estimate來估計狀態動作對,這樣會使得我們over-estimate Q,所以就有了Double Q-learning演算法,這種演算法首先用Q-estimate來選擇動作A',接著用Q-target來公平地估計這個狀態動作對,從而減輕了over-estimate問題。關於Double Q-leanring這裡就不詳述了,有興趣的同學可以去看看論文《Deep Reinforcement Learning with Double Q-learning》。


在Q-learning演算法中,我們只有一個值函式q,行為策略和目標策略均由它產生。如果我們將上面演算法中的target換為R+gamma*Q(S',A')(這裡A'是從行為策略中產生),那麼就是Sarsa演算法了。而這裡使用目標策略對應的值函式構造target,其想法就是朝著目標策略(也即greedy策略)去更新,從而使之收斂到確定性策略對應的值函式。
值得一提的是,Q-learning也叫做SARSAMAX,記住這一點也就可以很容易地記住Q-learning演算法了。
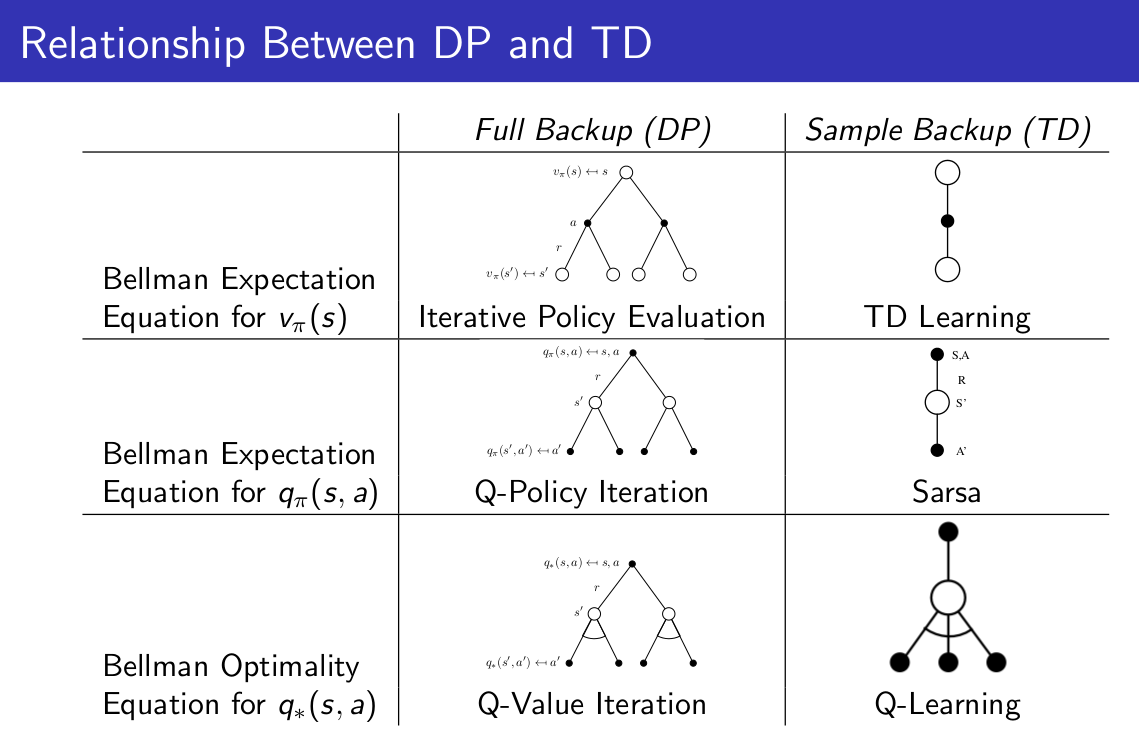
在本文的最後,給出動態規劃方法與時間差分方法之間的關係表格:

祝大家工作愉快~