
雙目相機--雙目視差與深度距離關係推導詳解
相機成像的模型如下圖所示:
P為空間中的點,P1和P2是點P在左右像平面上的成像點,f是焦距,OR和OT是左右相機的光心。由下圖可見左右兩個相機的光軸是平行的。XR和XT是兩個成像點在左右兩個像面上距離影象左邊緣的距離。
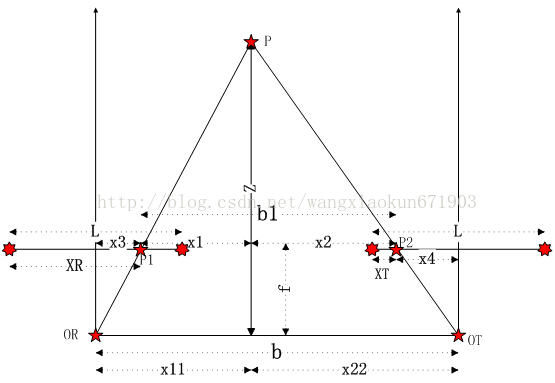
若兩個相機已經校正完成即達到極線平行,兩條光軸方向也平行。則視差和物體深度的關係式如下:
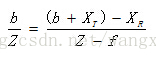
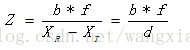
可推導到:
證明過程:
已知:
由相似三角形原理:
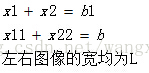
(1)+(2)有:
其中b1可以用b、XR和XT表示。

可得(5)式變為(1)式:
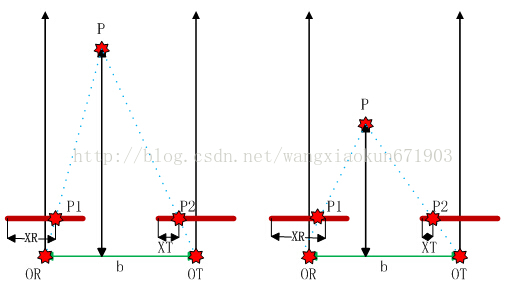
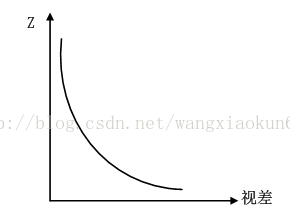
由上面兩幅圖,可知距離像面越近的點,它在左右相機中的視差越大,距離像面越遠的點,它在左右相機中的視差越小。
深度Z和視差的關係圖如下:
相關推薦
雙目相機--雙目視差與深度距離關係推導詳解
相機成像的模型如下圖所示: P為空間中的點,P1和P2是點P在左右像平面上的成像點,f是焦距,OR和OT是左右相機的光心。由下圖可見左右兩個相機的光軸是平行的。XR和XT是兩個成像點在左右兩個像面上距離影象左邊緣的距離。 若兩個相機已經
雙目視差與深度關係推導
相機成像的模型如下圖所示: P為空間中的點,P1和P2是點P在左右像平面上的成像點,f是焦距,OR和OT是左右相機的光心。由下圖可見左右兩個相機的光軸是平行的。XR和XT是兩個成像點在左右兩個像面上距離影象左邊緣的距離。 只要把這下面幾點說清楚就很簡單了 L為像面
php冒泡排序與快速排序實例詳解
lag ++ function 開始 ret light 記錄 php冒泡排序 php $a=array(‘3‘,‘8‘,‘1‘,‘4‘,‘11‘,‘7‘); print_r($a); $len = count($a); //從小到大 for($i=1;$i<$le
3dsmax2014的下載、安裝與註冊激活教程詳解
com cor 殺毒 系統 3dmax http 後退 tar 輸入 3dsmax2014的下載、安裝與註冊激活教程,雖然網上類似的教程文章不勝枚舉,但大多比較粗枝大葉,沒有詳細的步驟,尤其對於電腦小白來說,更是不易參考,今天我就教大家如何註冊破解3dsmax2014吧!
UML類圖與類的關系詳解--轉
position 好的 -a erp 生命 靜態 pan 雙向 單選 http://www.uml.org.cn/oobject/201104212.asp 原文地址 UML類圖與類的關系詳解 2011-04-21 來源:網絡
TCP協議的3次握手與4次揮手過程詳解
進行 發送數據 不存在 信息 隊列 協議 標識 方式 ar9 所謂三次握手(Three-Way Handshake)即建立TCP連接,就是指建立一個TCP連接時,需要客戶端和服務端總共發送3個包以確認連接的建立。所謂四次揮手(Four-Way Wavehand)即終止TCP
css-浮動與清除浮動的原理詳解(清除浮動的原理你知道嗎)
alt col ges mage all strong splay height http float元素A的特點: 脫離文檔流 靠向left或right float元素會和塊盒子重疊 準確來說,是塊盒子和A重疊,但塊盒子內容會浮動在A周圍 不會和inline元素重
UML類圖與類的關系詳解
enc pla 分享 包含關系 影響 基礎 rem 建模 基本組件 UML類圖與類的關系詳解 在畫類圖的時候,理清類和類之間的關系是重點。類的關系有泛化(Generalization)、實現(Realizati
Flask(十)flash與前臺交互post詳解
ace for pos pre 視圖 bmi temp 做的 輸入 Project name :Flask_Plan templates:templates static:static POST提交方式,首先要有表單 老實去改模板文件吧。 查詢窗口我準備放在頁面最頂上,就改
PHP與Java集成開發詳解(一)
new 編程語言 到你 其中 web-inf request 測試 add 輸入 很久以前,有人從www上看到看到天空上一個很亮的亮點,它就是Java語言,與此同時,在另一個地方一位夢想家也看到了一個亮點,它就是PHP。 時間一天天過去,這兩個亮點也變得越來越亮,很快,它
【轉】Quartz.net持久化與集群部署開發詳解
疑惑 sum 常用 drive wid res net github hub 轉自:http://www.cnblogs.com/knowledgesea/p/5145239.html 序言 我前邊有幾篇文章有介紹過quartz的基本使用語法與類庫。但是他的執行計劃都是被寫
seekg()/seekp()與tellg()/tellp()的用法詳解
文件操作 一個 需要 message ret 開頭 origin 部分 rom 本文轉載於:http://blog.csdn.net/mafuli007/article/details/7314917 (在tcp的文件發送部分有應用) 對輸入流操作:seekg()與tell
Storm筆記整理(五):可靠性分析、定時任務與Storm UI參數詳解
大數據 實時計算 Storm [TOC] 特別說明:前面的四篇Storm筆記中,關於計算總和的例子中的spout,使用了死循環的邏輯,實際上這樣做是不正確的,原因很簡單,Storm提供給我們的API中,nextTuple方法就是循環執行了,這相當於是做了雙層循環。因為後面在做可靠性acker案
jQuery對html元素的取值與賦值實例詳解
背景 select下拉框 items float item wrapper data qq登錄 dde jQuery對html元素的取值與賦值實例詳解 轉載 2015-12-18 作者:歡歡 我要評論
OSI網絡參考模型與TCP/IP協議簇詳解 一
OSI七層OSI網絡參考模型是理想化的藍圖 事實運用模型是TCP/IP 參考模型 OSI七層主要作用 應用層 網絡服務與最終用用戶的接口 表示層 數據的表示 安全 壓縮 會話層 建立管理終止會話 傳輸層 定義傳輸數據的協議端口號 網絡層 進行邏輯地址尋址 實現不同
二層交換機與三層交換機區別詳解
交換機VLAN我們習慣說,在二層網絡環境中相同vlan之間可以通信,不同vlan之間不可以通信,如果想通信必須借助三層設備,所以說三層交換機必須要做的事情是路由轉發,但是二、三層交換機具體有什麽區別呢? 二層交換機工作於OSI模型的第2層(數據鏈路層),故而稱為二層交換機。 二層交換技術發展比較成熟,二層交換
linux中chmod與chown兩個命令詳解
In 第一個 ID 利用 root chown 資料 後綴 沒有 在linux系統中chmod,chown命令都可以來設置權限了,但它們也是有區別的,下文小編為各位介紹chmod與chown兩個命令用法與區別介紹。 今天要分享的2個命令也是我們平時常用的,chmod與cho
五分鐘看懂UML類圖與類的關系詳解
故障 rose href 如果 rgb lan 繼承關系 模型 title 在畫類圖的時候,理清類和類之間的關系是重點。類的關系有泛化(Generalization)、實現(Realization)、依賴(Dependency)和關聯(Association)。其中關聯又分
無線充電技術(四種主要方式)原理與應用實例圖文詳解
應用 圖文 方式 原理 詳解 bubuko 技術分享 image 9.png 轉自網絡 無線充電技術(四種主要方式)原理與應用實例圖文詳解
PHP命名空間與自動加載類詳解
命名 ech stat 自動 spl pla 空間 程序設計 php面向對象 本文實例講述了PHP命名空間與自動加載類。分享給大家供大家參考,具體如下:今天我要給大家介紹的是PHP的命名空間 和 自動加載類我先簡單的分開演示 在放在一起大家請看:什麽是自動加載類?想必大家都