
Pixhawk與樹莓派3的串列埠通訊
阿新 • • 發佈:2019-01-10
新建主題
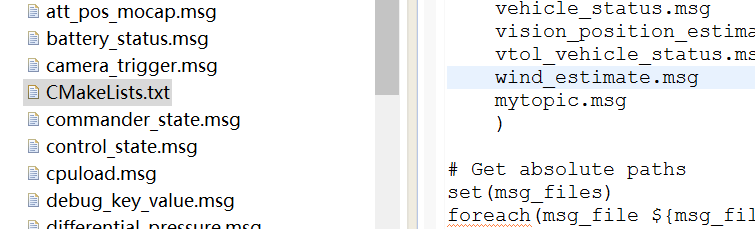
msg資料夾下新建mytopic.msg檔案
char[4] datastr0 //字串的寫法 存放傳送過來的字串 uint8 data//將字串轉換成整型在msg資料夾中的cmkaelist檔案中加入
新建pi_uart模組
- 在src目錄的modules資料夾下新建pi_uart資料夾
- 在pi_uart資料夾下新建pi_uart.c
- 實現的功能:
- 開機自啟動
- 持續接收串列埠資料(’R’開頭的字串)
- 傳送串列埠資料
- 將接收到的資料更新發布到mytopic主題中
#include <stdio.h>
#include <termios.h> - 新建CMakeList.txt檔案
px4_add_module(
MODULE modules__pi_uart
MAIN pi_uart
STACK_MAIN 2000
SRCS
pi_uart.c
DEPENDS
platforms__common
)- 在cmake/config/nuttx_px4fmu-v2_default.cmake中新增
modules/pi_uart- 在ROMFS/px4fmu_common/rcS中新增
pi_uart start- 編譯
- 燒寫
樹莓派3串列埠傳送
- 樹莓派3環境配置另寫博文
- 迴圈傳送‘R1100’小程式
#include <stdio.h>
#include <wiringPi.h>
#include <wiringSerial.h>
int main()
{
int fd;
char data[5]=“R1100”;
int flag=1;
if(wiringPiSetup()<0)return 1;
if((fd=serialOpen("/dev/ttyS0",9600))<0) return 1;
printf("serial test start ...\n");
serialPrintf(fd,"Hello world!\n");
while(flag)
{
serialPrintf(fd,data);//向串列埠裝置傳送data資料
delay(300);
while(serialDataAvail(fd))
{
printf("->%3d\n",serialGetchar(fd));
flag=0; fflush(stdout);
}
}
serialFlush(fd);
serialClose(fd);
return 0;
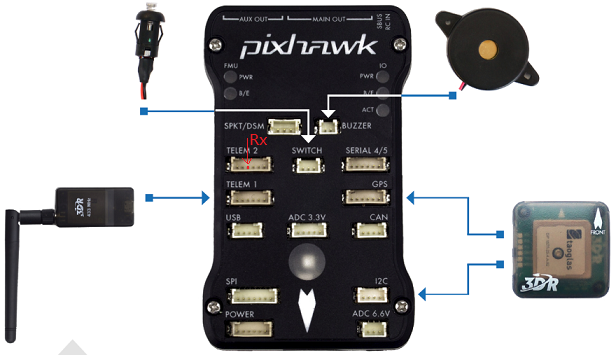
} Pixhawk與樹莓派3連線
TX–RX
RX–TX
GND–GND
- TELEM1和TELEM2都是串列埠,從左到右分別是VC TXD RXD 未知 未知 GND
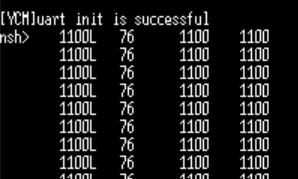
測試結果
參考
Pixhawk—通過串列埠方式新增一個自定義感測器(超聲波為例) —— FreeApe