
Spatial Transformer Networks(空間變換神經網路)
閒扯:大資料不如小資料
這是一份很新的Paper(2015.6),來自於Google旗下的新銳AI公司DeepMind的四位劍橋Phd研究員。
他們針對CNN的特點,構建了一個新的區域性網路層,稱為空間變換層,如其名,它能將輸入影象做任意空間變換。
大資料不如小資料,如果大資料不能被模型有效利用。
該現象是比較常見的,如ML實戰的一個經典問題:資料不均衡,這樣模型就會對大類資料過擬合,忽略小類資料。
將大資料按照難易度剖分,分批學習,要比直接全部硬塞有效得多。
當前,我們炙手可熱的模型仍然是蒟蒻的,而資料卻是巧奪天工、超乎想象的。
因而,想要通過模型完全摸清資料的Distribution是不現實的,發明、改良模型結構仍然是第一要務,
而不單純像Li Feifei教授劍走偏鋒,用ImageNet這樣的大資料推進深度學習程序。
空間變換的重要意義
[區域性性]、[平移不變性]、[縮小不變性],還對缺失的[旋轉不變性]做了相應的實驗。
這些不變性的本質就是影象處理的經典手段,[裁剪]、[平移]、[縮放]、[旋轉]。
這些手段又屬於一個家族:空間變換,又服從於同一方法:座標矩陣的仿射變換。
那麼,神經網路是否有辦法,用一種統一的結構,自適應實現這些變換呢?DeepMind用一種簡易的方式實現了。
影象處理技巧:仿射矩陣、逆向座標對映、雙線性插值
1.1 仿射變換矩陣
實現[裁剪]、[平移]、[縮放]、[旋轉]
$\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}$
—————————————————————————————————————————————————————————
對於平移操作,座標仿射矩陣為:
$\begin{bmatrix}1 & 0 & \theta_{13} \\ 0& 1 & \theta_{23}\end{bmatrix}\begin{bmatrix}x\\ y\\1\end{bmatrix}=\begin{bmatrix}x+\theta_{13}\\
y+\theta_{23}\end{bmatrix}$
—————————————————————————————————————————————————————————
對於縮放操作,座標仿射矩陣為:
$\begin{bmatrix}\theta_{11} & 0 & 0 \\ 0& \theta_{22} & 0\end{bmatrix}\begin{bmatrix}x\\ y\\1\end{bmatrix}=\begin{bmatrix}\theta_{11}x\\
\theta_{22}y\end{bmatrix}$
—————————————————————————————————————————————————————————
對於旋轉操作,設繞原點順時針旋轉$\alpha$度,座標仿射矩陣為:
$\begin{bmatrix}cos(\alpha) & sin(\alpha) & 0 \\ -sin(\alpha)& cos(\alpha) & 0\end{bmatrix}\begin{bmatrix}x\\ y\\1\end{bmatrix}=\begin{bmatrix}
cos(\alpha)x+sin(\alpha)y\\ -sin(\alpha)x+cos(\alpha)y\end{bmatrix}$
這裡有個trick,由於影象的座標不是中心座標系,所以只要做下Normalization,把座標調整到[-1,1]。
這樣,就繞影象中心旋轉了,下文中會使用這個trick。
—————————————————————————————————————————————————————————
至於裁剪操作,沒有看懂Paper的關於左2x2 sub-matrix的行列式值的解釋,但可以從座標範圍解釋:
只要$x^{'}$、$y^{'}$的範圍比$x$,$y$小,那麼就可以認為是目標圖定位到了源圖的區域性。
這種這種仿射變換沒有具體的數學形式,但肯定是可以在神經網路搜尋過程中使用的。
1.2 逆向座標對映
注:感謝網友@載重車提出疑問,修正了這部分的內容。具體請移步評論區。
★本部分作為一個對論文的錯誤理解,保留。
線上性代數計算中,一個經典的求解思路是:
$\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}\begin{bmatrix}x^{Source}\\ y^{Source}\\ 1\end{bmatrix}=\begin{bmatrix}x^{Target}\\ y^{Target}\end{bmatrix}$
這種做法在做影象處理時,會給並行矩陣程式設計造成尷尬——需要犧牲額外的空間儲存對映源,:
由於$(x^{Target},y^{Target})$必然是離散的,當我們需要得到$Pixel(x^{Target},y^{Target})$的值時,
如果不及時儲存$(x^{Source},y^{Source})$,那麼就必須即時單點複製$Pixel(x^{Source},y^{Source})->Pixel(x^{Target},y^{Target})$
顯然,這種方法的實現依賴於$For$迴圈:
$For(0....i....Height)\\ \quad For(0....j....Width) \\ \quad \quad Calculate\&Copy$
為了能讓矩陣平行計算成為可能,我們需要逆轉一下思路:
$\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}^{'}\begin{bmatrix}x^{Target}\\ y^{Target}\\ 1\end{bmatrix}=\begin{bmatrix}x^{Source}\\ y^{Source}\end{bmatrix}$
之後,構建變換目標圖就轉化成了,陣列下標取元素問題:
$PixelMatrix^{Target}=PixelMatrix^{Source}[x^{Source},y^{Source}]$
這依賴於仿射矩陣的一個性質:
$\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}^{'}=\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}^{-1}$
即,由Target變換為Source時,新仿射矩陣為源仿射矩陣的逆矩陣。
1.3 雙線性插值
考慮一個$[1,10]$影象放大10倍問題,我們需要將10個畫素,擴充套件到為100的數軸上,整個影象應該有100個畫素。
但其中90個對應Source圖的座標是非整數的,是不存在的,如果我們用黑色($RGB(0,0,0)$)填充,此時影象是慘不忍睹的。
所以需要對缺漏的畫素進行插值,利用影象資料的區域性性近似原理,取鄰近畫素做平均生成。
雙線性插值是一個兼有質量與速度的方法(某些電子遊戲裡通常這麼排列:線性插值、雙線性插值....):
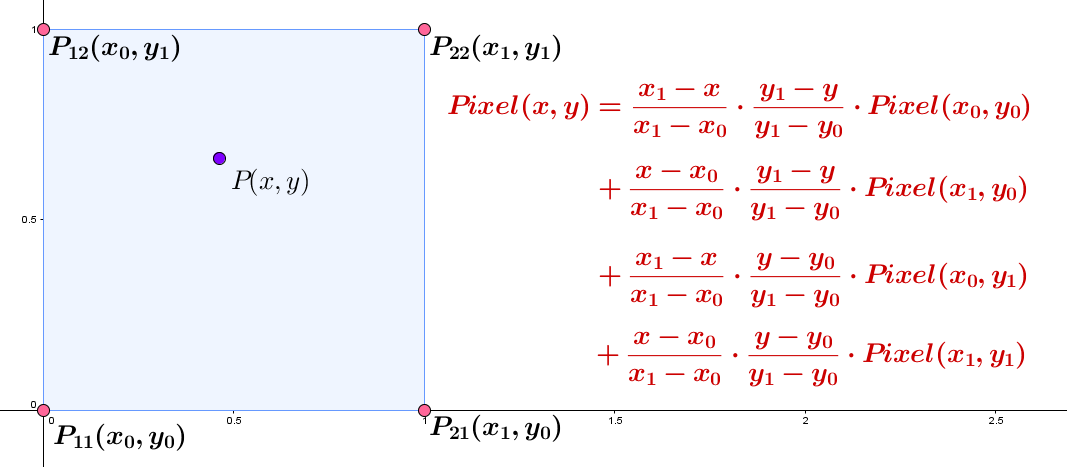
如果$(x^{Source},y^{Source})$是實數座標,那麼先取整(截尾),然後沿軸擴充套件$d$個座標單位,得到$P_{21}$、$P_{12}$、$P_{22}$
一般的(原始碼中),取$d=1$,式中分母全被消去,再利用圖中雙線性插值式進行插值,得到$Pixel(x^{Source},y^{Source})$的近似值。
神經網路
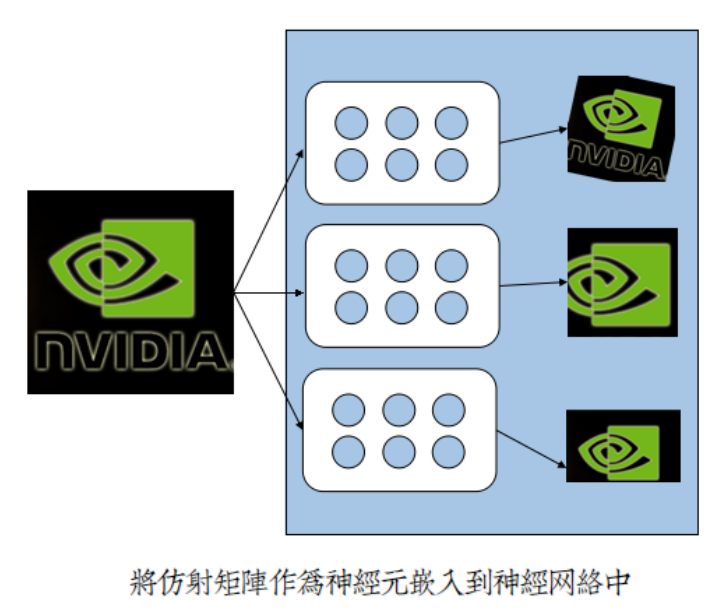
2.1 塊狀神經元
CNN是一個變革的先驅者模型,它率先提出區域性連線觀點,減少網路廣度,增加網路深度。
區域性連線讓神經元呈塊狀,單引數成引數組;讓網路2D化,切合2D影象;讓權值共享,大幅度減少引數量。
仿射矩陣自適應學習理論,因此而得以實現:
2.2 基本結構與前向傳播
論文中的結構圖描述得不是很清楚,個人做了部分調整,如下:
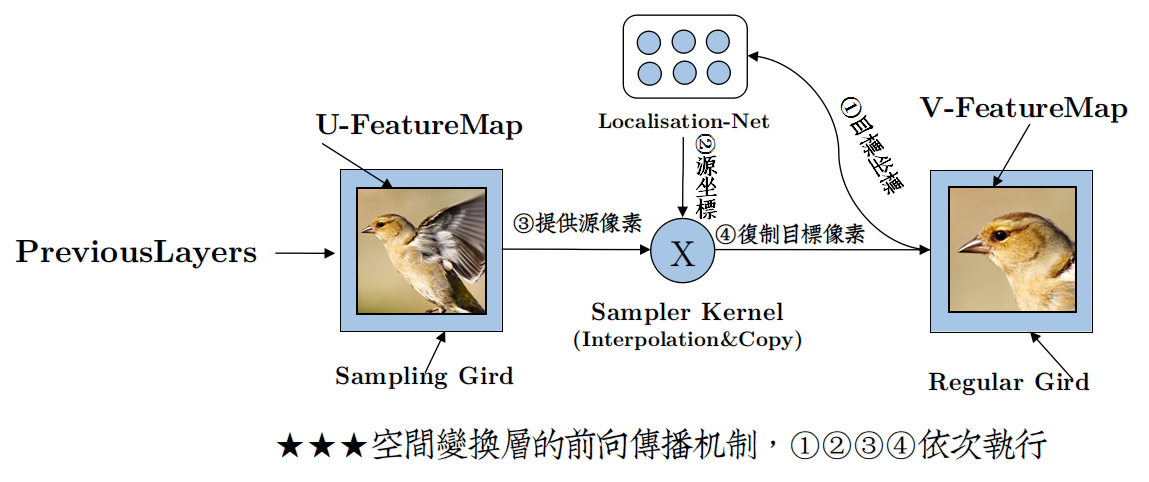
DeepMind為了描述這個空間變換層,首先添加了座標網格計算的概念,即:
對應輸入源特徵影象素的座標網格——Sampling Grid,儲存著$(x^{Source},y^{Source})$
對應輸出源特徵影象素的座標網格——Regluar Grid ,儲存著$(x^{Target},y^{Target})$
然後,將仿射矩陣神經元組命名為定位網路 (Localisation Network)。
對於一次神經元提供引數,座標變換計算,記為 $\tau_{\theta}(G)$,根據1.2,有:
$\tau_{\theta}(G_{i})=\begin{bmatrix}\theta_{11} & \theta_{12} & \theta_{13} \\ \theta_{21}& \theta_{22} & \theta_{23}\end{bmatrix}^{'}\cdot\begin{bmatrix}x_{i}^{Target}\\ y_{i}^{Target}\\ 1\end{bmatrix}=\begin{bmatrix}x_{i}^{Source}\\ y_{i}^{Source}\end{bmatrix}\quad where \quad i=1,2,3,4..,H*W$
該部分對應於圖中的①②,但是與論文中的圖有些變化,可能是作者並沒有將逆向計算的Trick搬到結構圖中來。
所以你看到的仍然是Sampling Grid提供座標給定位網路,而具體實現的時候恰好是相反的,座標由Regluar Grid提供。
————————————————————————————————————————————————————————
Regluar Grid提供的座標組是順序逐行掃描座標的序列,序列長度為 $[Heght*Width]$,即:
將2D座標組全部1D化,根據在序列中的位置即可立即算出,在Regluar Grid中位置。
這麼做的最大好處在於,無須額外儲存Regluar Grid座標$(x^{Target},y^{Target})$。
因為從輸入特徵圖$U$陣列中,按下標取出的新畫素值序列,仍然是逐行掃描順序,簡單分隔一下,便得到了輸出特徵圖$V$。
該部分對應於圖中的③。
————————————————————————————————————————————————————————
(1.3)中提到了,直接簡單按照$(x^{Source},y^{Source})$,從源畫素陣列中複製畫素值是不可行的。
因為仿射變換後的$(x^{Source},y^{Source})$可以為實數,但是畫素位置座標必須是整數。
為了解決畫素值缺失問題,必須進行插值。插值核函式很多,原始碼中選擇了論文中提供的第二種插值方式——雙線性插值。
(1.3)的插值式非常不優雅,DeepMind在論文利用max與abs函式,改寫成一個簡潔、優雅的插值等式:
$V_{i}^{c}=\sum _{n}^{H}\sum _{m}^{W}U_{nm}^{c}\max(0,1-|x_{i}^{S}-m|)\max(0,1-|y_{i}^{S}-n|) \quad where \quad i\in [1,H^{'}W^{'}],c\in[1,3]$
兩個 $\sum$ 實際上只篩出了四個鄰近插值點,雖然寫法簡潔,但白迴圈很多,所以原始碼中選擇了直接算4個點,而不是用迴圈篩。
該部分對應圖中的④。
2.3 梯度流動與反向傳播
新增空間變換層之後,梯度流動變得有趣了,如圖:
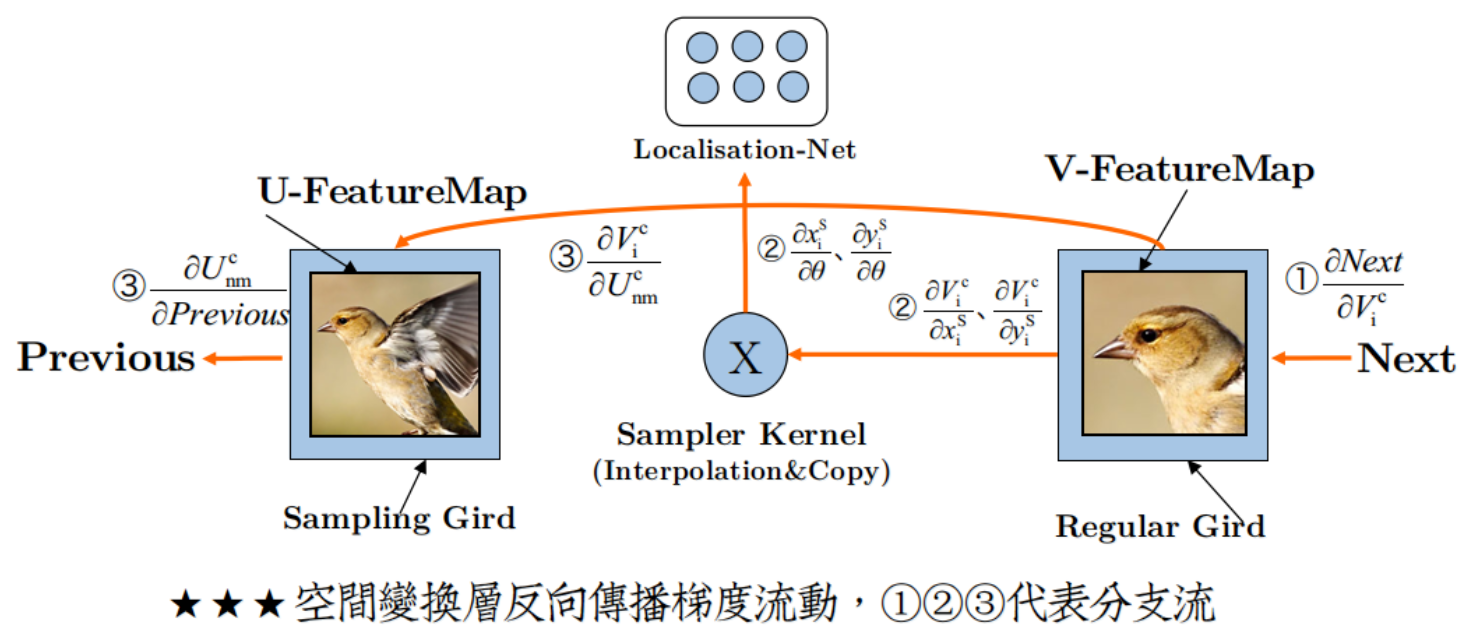
形成了三股分支流:
(I)後の流:
$ErrorGradient\rightarrow .....\rightarrow \frac{\partial Next}{\partial V_{i}^{c}}$
這是Back Propagation從後層繼承的動力源泉,沒有它,你就不可能完成Back Propagation。
(II)裡の流:
$\left\{\begin{matrix}\frac{\partial V_{i}^{c}}{\partial x_{i}^{S}}\rightarrow \frac{\partial x_{i}^{S}}{\partial \theta}\\ \frac{\partial V_{i}^{c}}{\partial y_{i}^{S}}\rightarrow \frac{\partial y_{i}^{S}}{\partial \theta}\end{matrix}\right.$
個人對這股流的最好描述就是:一江春水流進了小黑屋。
是的,你沒有看錯,這股流根本就沒有流到網路開頭,而是在定位網路處就斷流了。
由此來看,定位網路就好像是在主網路旁側偷建的小黑屋,是一個違章建築。
所以也無怪乎作者說,定位網路直接變成了一個迴歸模型,因為更新完引數,流就斷了,獨立於主網路。
(III)前の流:
$\frac{\partial V_{i}^{c}}{\partial U_{nm}^{i}}\rightarrow\frac{\partial U_{nm}^{i}}{\partial Previous}$
這是Back Propagation傳宗接代的根本保障,沒有它,Back Propagation就斷子絕孫了。
2.4* 區域性梯度
論文中多次出現[區域性梯度](Sub-Gradient) 的概念。
作者們反覆強調,他們寫的,優雅簡潔的取樣核函式,是不連續的,不能如下直接求導:
$g=\frac{\partial V_{i}^{c}}{\partial \theta}$
而應該是分兩步,先對$x_{i}^{S}$ 、$x_{i}^{S}$ 求區域性梯度: $\frac{\partial V_{i}^{c}}{\partial x_{i}^{c}}$ 、$\frac{\partial V_{i}^{c}}{\partial y_{i}^{c}}$,後有:
$\left\{\begin{matrix}g=\frac{\partial V_{i}^{c}}{\partial x_{i}^{S}} \cdot \frac{\partial x_{i}^{S}}{\partial \theta}\\ g=\frac{\partial V_{i}^{c}}{\partial y_{i}^{S}} \cdot \frac{\partial y_{i}^{S}}{\partial \theta}\end{matrix}\right.$
有趣的是,對於Theano這種自動求導的Tools,區域性梯度可以直接被忽視。
因為Theano的Tensor機制,會聰明地討論並且解離非連續函式,追蹤每一個可導子式,即便你用了作者們的優雅的取樣函式,
Tensor.grad函式也能精確只對篩出的4個點求導,所以在Theano裡討論非連續函式和區域性梯度,是會被貽笑大方的。
相關推薦
Spatial Transformer Networks(空間變換神經網路)
閒扯:大資料不如小資料 這是一份很新的Paper(2015.6),來自於Google旗下的新銳AI公司DeepMind的四位劍橋Phd研究員。 他們針對CNN的特點,構建了一個新的區域性網路層,稱為空間變換層,如其名,它能將輸入影象做任意空間變換。 大資料不如小資料,如果大資料不能被模型有效利用
空間變換網路Spatial Transformer Networks(STN)
相關理論 (見https://zhuanlan.zhihu.com/p/37110107) 在理解STN之前,先簡單瞭解一下基本的仿射變換、雙線性插值。 1.仿射變換(Affine transformation) 下面的所有變換假設都是針對一幅影象,即一個三維陣列(HWC),這裡為簡
深度學習方法(十二):卷積神經網路結構變化——Spatial Transformer Networks
歡迎轉載,轉載請註明:本文出自Bin的專欄blog.csdn.net/xbinworld。 技術交流QQ群:433250724,歡迎對演算法、機器學習技術感興趣的同學加入。 今天具體介紹一個Google DeepMind在15年提出的Spatial T
Spatial Transformer Networks
network 字符 cal csdn inpu 參考 其中 關鍵點 我只 轉載自這裏 參考文獻:**Jaderberg M, Simonyan K, Zisserman A. Spatial transformer networks[C]//Advances in Neu
自然場景文字處理論文整理(1)Spatial Transformer Networks
paper:Spatial Transformer Networks 在Theano框架中,STN演算法已經被封裝成API,可以直接呼叫。tensorflow實現見文章最後。 1、空間變換器的結構: 這是一個可微分的模組,它在單個前向傳遞期間將空間變換應用於要素圖,其中變換以特
Neural Networks and Convolutional Neural Networks Essential Training 神經網路和卷積神經網路基礎教程 Lynda課程中文字幕
Neural Networks and Convolutional Neural Networks Essential Training 中文字幕 神經網路和卷積神經網路基礎教程 中文字幕Neural Networks and Convolutional Neural Networks
Deep Learning(深度學習)學習筆記整理系列之(七)Convolutional Neural Networks卷積神經網路
轉處:http://blog.csdn.net/zouxy09/article/details/8781543/ Deep Learning(深度學習)學習筆記整理系列 作者:Zouxy version 1.0 2013-04-08 宣告: 1)該Deep
卷積神經網路學習筆記——Siamese networks(孿生神經網路)
完整程式碼及其資料,請移步小編的GitHub地址 傳送門:請點選我 如果點選有誤:https://github.com/LeBron-Jian/DeepLearningNote 在整理這些知識點之前,我建議先看一下原論文,不然看我這個筆記,感覺想到哪裡說哪裡,如果看了論文,還有不懂的,正好這篇部落
基於空間金字塔池化的卷積神經網路物體檢測(SPPNET)(Spatial Pyramid Pooling)
1.解決的問題 當前的CNN輸入圖片尺寸是固定的,但是當進行圖片預處理的時候,往往會降低檢測的準確度。而SPPNET則可以輸入任意尺寸的圖片,並且使得最後的精度有所提升。 CNN中圖片的固定尺寸是受到全連線層的影響。因為全連線層我們的連線權值矩陣的大小W,經過訓
空間變換網路--spatial transform network
CNN分類時,通常需要考慮輸入樣本的區域性性、平移不變性、縮小不變性,旋轉不變性等,以提高分類的準確度。這些不變性的本質就是影象處理的經典方法,即影象的裁剪、平移、縮放、旋轉,而這些方法實際上就是對影象進行空間座標變換,我們所熟悉的一種空間變換就是仿射變換,影象
深度學習(十九)基於空間金字塔池化的卷積神經網路物體檢測
原文地址:http://blog.csdn.net/hjimce/article/details/50187655 作者:hjimce 一、相關理論 本篇博文主要講解大神何凱明2014年的paper:《Spatial Pyramid Pooling in Dee
Sentiment Analysis with Recurrent Neural Networks in TensorFlow 利用TensorFlow迴歸神經網路進行情感分析 Pluralsigh
Sentiment Analysis with Recurrent Neural Networks in TensorFlow 中文字幕 利用TensorFlow迴歸神經網路進行情感分析 中文字幕Sentiment Analysis with Recurrent Neural Netwo
DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(1)
title: ‘DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(1)’ id: dl-ai-5-1h1 tags: dl.ai homework categories: AI Deep
DeepLearning.ai筆記:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)
title: ‘DeepLearning.ai筆記:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)’ id: dl-ai-5-1 tags: dl.ai categories: AI Deep Learning date: 2
DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(2)
title: ‘DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(2)’ id: dl-ai-5-1h2 tags: dl.ai homework categories: AI Deep
DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(3)
title: ‘DeepLearning.ai作業:(5-1)-- 迴圈神經網路(Recurrent Neural Networks)(3)’ id: dl-ai-5-1h3 tags: dl.ai homework categories: AI Deep
高速路神經網路(Highway Networks)與深度殘差網路(ResNet)的原理和區別
高速路神經網路(Highway Networks): 我們知道,神經網路的深度是其成功的關鍵因素。然而,隨著深度的增加,網路訓練變得更加困難,並且容易出現梯度爆炸或梯度消失的問題。高速路神經網路(Highway Networks)就是為了解決深層網路訓練困難的問題而提出的。 在一般的神經
機器學習與深度學習系列連載: 第二部分 深度學習(十)卷積神經網路 1 Convolutional Neural Networks
卷積神經網路 Convolutional Neural Networks 卷積神經網路其實早在80年代,就被神經網路泰斗Lecun 提出[LeNet-5, LeCun 1980],但是由於當時的資料量、計算力等問題,沒有得到廣泛使用。 卷積神經網路的靈感來自50年代的諾貝爾生物學獎
深度神經網路的多工學習概覽(An Overview of Multi-task Learning in Deep Neural Networks)
譯自:http://sebastianruder.com/multi-task/ 1. 前言 在機器學習中,我們通常關心優化某一特定指標,不管這個指標是一個標準值,還是企業KPI。為了達到這個目標,我們訓練單一模型或多個模型集合來完成指定得任務。然後,我們通過精細調參,來改進模型直至效能不再
cs231 卷積神經網路Convolutional Networks群組歸一化GN( Group Normalization)
cs231 Convolutional Networks Group Normalization: def spatial_groupnorm_forward(x, gamma, beta, G, gn_param): """ Co