
機器學習之K近鄰(KNN)演算法
1.KNN簡介
K近鄰(K-Nearest Neighbors, KNN)演算法既可處理分類問題,也可處理迴歸問題,其中分類和迴歸的主要區別在於最後做預測時的決策方式不同。KNN做分類預測時一般採用多數表決法,即訓練集裡和預測樣本特徵最近的K個樣本,預測結果為裡面有最多類別數的類別。KNN做迴歸預測時一般採用平均法,預測結果為最近的K個樣本資料的平均值。其中KNN分類方法的思想對迴歸方法同樣適用,因此本文主要講解KNN分類問題,下面我們通過一個簡單例子來了解下KNN演算法流程。
如下圖所示,我們想要知道綠色點要被決定賦予哪個類,是紅色三角形還是藍色正方形?我們利用KNN思想,如果假設K=3,選取三個距離最近的類別點,由於紅色三角形所佔比例為2/3,因此綠色點被賦予紅色三角形類別。如果假設K=5

從上面例項,我們可以總結下KNN演算法過程
- 計算測試資料與各個訓練資料之間的距離。
- 按照距離的遞增關係進行排序,選取距離最小的K個點。
- 確定前K個點所在類別的出現頻率,返回前K個點中出現頻率最高的類別作為測試資料的預測分類。
從KNN演算法流程中,我們也能夠看出KNN演算法三個重要特徵,即距離度量方式、K值的選取和分類決策規則。
- 距離度量方式: KNN演算法常用歐式距離度量方式,當然我們也可以採用其他距離度量方式,比如曼哈頓距離,相應公式如下所示。
- K值的選取: KNN演算法決策結果很大程度上取決於K值的選擇。選擇較小的K值相當於用較小領域中的訓練例項進行預測,訓練誤差會減小,但同時整體模型變得複雜,容易過擬合。選擇較大的K值相當於用較大領域中訓練例項進行預測,可以減小泛化誤差,但同時整體模型變得簡單,預測誤差會增大。
- 分類決策規則: KNN分類決策規則經常使用我們前面提到的多數表決法,在此不再贅述。
KNN要選取前K個最近的距離點,因此我們就要計算預測點與所有點之間的距離。但如果樣本點達到幾十萬,樣本特徵有上千,那麼KNN暴力計算距離的話,時間成本將會很高。因此暴力計算只適合少量樣本的簡單模型,那麼有沒有什麼方法適用於大樣本資料,有效降低距離計算成本呢?那是當然的,我們下面主要介紹KD樹和球樹方法。
2.KD樹原理
KD樹演算法沒有一開始就嘗試對測試樣本進行分類,而是先對訓練集建模,建立的模型就是KD樹,建立好模型之後再對測試集做預測。KD樹就是K個特徵維度的樹,注意KD樹中K和KNN中的K意思不同。KD樹中的K代表樣本特徵的維數,為了防止混淆,後面我們稱KD樹中特徵維數為n。KD樹可以有效減少最近鄰搜尋次數,主要分為建樹、搜尋最近鄰、預測步驟,下面我們對KD樹進行詳細講解。
2.1KD樹建立
下述為KD樹構建步驟,包括尋找劃分特徵、確定劃分點、確定左子空間和右子空間、遞迴構建KD樹。
- 尋找劃分特徵: KD樹是從m個樣本的n維特徵中,分別計算n個特徵取值的方差,用方差最大的第k維特徵nk來作為根節點。
- **確定劃分點:**選擇特徵nk的中位數nkv所對應的樣本作為劃分點。
- **確定左子空間和右子空間:**對於所有第k維特徵取值小於nkv的樣本劃入左子樹,所有第k維特徵取值大於nkv的樣本劃入右子樹。
- **遞迴構建KD樹:**對於左子樹和右子樹,採用和上述同樣的方法來找方差最大的特徵生成新節點,遞迴的構建KD樹。
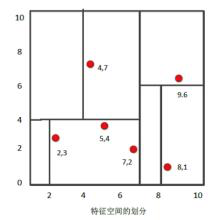
我們舉例來說明KD樹構建過程,假如有二維樣本6個,分別為{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},KD樹過程構建過程如下
- 尋找劃分特徵: 6個數據點在x,y維度上方差分別為6.97,5.37,x軸上方差更大,用第1維度特徵建樹。
- **確定劃分點:**根據x維度上的值將資料排序,6個數據中x的中值為7,所以劃分點資料為(7,2),該節點的分割超平面便是x=7直線。
- **確定左子空間和右子空間:**分割超平面x=7將空間分為兩部分。x<=7的部分為左子空間,包含節點為{(2,3),(5,4),(4,7)}。x>7的部分為右子空間,包含節點為{(9,6),(8,1)}。
- **遞迴構建KD樹:**用同樣的方法劃分左子樹{(2,3),(5,4),(4,7)}和右子樹{(9,6),(8,1)},最終得到KD樹。

2.2KD樹搜尋最近鄰
當我們生成KD樹後,就可以預測測試樣本集裡面的樣本目標點。
- 二叉搜尋:對於目標點,通過二叉搜尋,能夠很快在KD樹裡面找到包含目標點的葉子節點。
- 回溯:為找到最近鄰,還需要進行回溯操作,演算法沿搜尋路徑反向查詢是否有距離查詢點更近的資料點。以目標點為圓心,目標點到葉子節點的距離為半徑,得到一個超球體,最鄰近點一定在這個超球體內部。
- **更新最近鄰:**返回葉子節點的父節點,檢查另一葉子節點包含的超矩形體是否和超球體相交,如果相交就到這個子節點中尋找是否有更近的最近鄰,有的話就更新最近鄰。如果不相交就直接返回父節點的父節點,在另一子樹繼續搜尋最近鄰。當回溯到根節點時,演算法結束,此時儲存的最近鄰節點就是最終的最近鄰。
為方便理解上述過程,我們利用2.1建立的KD樹來尋找(2,4.5)的最近鄰。
- **二叉搜尋:**首先從(7,2)節點查詢到(5,4)節點。由於目標點y=4.5,同時分割超平面為y=4,因此進入右子空間(4,7)進行查詢,形成搜尋路徑{(7,2)->(5,4)->(4,7)}。
- **回溯:**節點(4,7)與目標查詢點距離為3.202,回溯到父節點(5,4)與目標查詢點之間距離為3.041,所以(5,4)為查詢點的最近鄰。以目標點(2,4.5)為圓心,以3.041為半徑作圓,最近鄰一定在超球體內部。
- **更新最近鄰:**該圓和y = 4超平面交割,所以需要進入(5,4)左子空間進行查詢,將(2,3)節點加入搜尋路徑{(7,2)->(2,3)}。回溯至(2,3)葉子節點,(2,4.5)到(2,3)的距離比到(5,4)要近,所以最近鄰點更新為(2,3),最近距離更新為1.5。回溯至(7,2),以(2,4.5)為圓心,1.5為半徑作圓,發現並不和x = 7分割超平面交割,至此搜尋路徑回溯完成,完成更新最近鄰操作,返回最近鄰點(2,3)。

2.3KD樹預測
根據KD樹搜尋最近鄰的方法,我們能夠得到第一個最近鄰資料點,然後把它置為已選。然後忽略置為已選的樣本,重新選擇最近鄰,這樣執行K次,就能得到K個最近鄰。如果是KNN分類,根據多數表決法,預測結果為K個最近鄰類別中有最多類別數的類別。如果是KNN迴歸,根據平均法,預測結果為K個最近鄰樣本輸出的平均值。
3.球樹原理
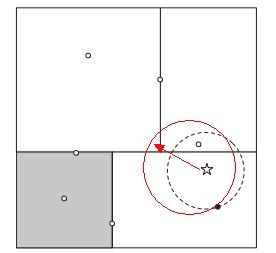
KD樹演算法能夠提高KNN搜尋效率,但在某些時候效率並不高,比如處理不均勻分佈的資料集時。如下圖所示,如果黑色的例項點離目標點(星點)再遠一點,那麼虛線會像紅線那樣擴大,導致與左上方矩形的右下角相交。既然相交那就要檢查左上方矩形,而實際上最近的點離目標點(星點)很近,檢查左上方矩形區域已是多餘。因此KD樹把二維平面劃分成矩形會帶來無效搜尋的問題。
為優化超矩形體帶來的搜尋效率問題,我們在此介紹球樹演算法來進一步提高最近鄰搜尋效率。
3.1球樹建立
球樹的每個分割塊都是超球體,而不像KD樹中的超矩形體,這樣在做最近鄰搜尋是可以避免無效搜尋,下面我們介紹球樹構建過程
- **構建超球體:**超球體是可以包含所有樣本的最小球體。
- **劃分子超球體:**從超球體中選擇一個離超球體中心最遠的點,然後選擇第二個點離第一個點最遠,將球中所有的點分配到離這兩個聚類中心最近的一個。然後計算每個聚類的中心,以及聚類能夠包含它所有資料點所需的最小半徑,這樣我們便得到兩個子超球體,和KD樹中的左右子樹對應。
- **遞迴:**對上述兩個子超球體,遞迴執行步驟2,最終得到球樹。

3.2球樹搜尋最近鄰
KD樹在搜尋路徑優化時使用的是兩點之間的距離來判斷,而球樹使用的是兩邊之和大於第三邊來判斷。相對來說球樹的判斷更加複雜,但卻避免一些無效的搜尋,下述為球樹搜尋最近鄰過程。
- 自上而下貫穿整棵樹找出包含目標點所在的葉子,並在這個球裡找出與目標點最鄰近的點,這將確定目標點距離最鄰近點的上限值。
- 然後和KD樹查詢相同,檢查兄弟結點,如果目標點到兄弟結點中心的距離超過兄弟結點的半徑與當前的上限值之和,那麼兄弟結點裡不可能存在一個更近的點。否則進一步檢查位於兄弟結點以下的子樹。
- 檢查完兄弟節點後,向父節點回溯,繼續搜尋最小鄰近值。當回溯到根節點時,此時的最小鄰近值就是最終的搜尋結果。
3.3球樹預測
根據球樹搜尋最近鄰的方法,我們能夠得到第一個最近鄰資料點,然後把它置為已選。然後忽略置為已選的樣本,重新選擇最近鄰,這樣執行K次,就能得到K個最近鄰。如果是KNN分類,根據多數表決法,預測結果為K個最近鄰類別中有最多類別數的類別。如果是KNN迴歸,根據平均法,預測結果為K個最近鄰樣本輸出的平均值。
4.KNN演算法擴充套件
有時我們會遇到樣本中某個類別數的樣本非常少,甚至少於我們實現定義的K,這將導致稀有樣本在找K個最近鄰的時候會把距離較遠的無關樣本考慮進來,進而導致預測不準確。為解決此類問題,我們先設定最近鄰的一個最大距離,也就是說,我們在一定範圍內搜尋最近鄰,這個距離稱為限定半徑。
5.Sklearn實現KNN演算法
下述程式碼是利用iris資料進行分類,我們經常需要通過改變引數來讓模型達到分類結果,具體引數設定可參考sklearn官方教程。
from sklearn.neighbors import KNeighborsClassifier
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
#load iris data
iris=load_iris()
X=iris.data
y=iris.target
X_train,X_test,y_train,y_test=train_test_split(X,y,test_size=0.3,random_state=1)
knn=KNeighborsClassifier(algorithm='kd_tree')
knn.fit(X_train,y_train)
print(knn.predict(X_test))
# [0 1 1 0 2 1 2 0 0 2 1 0 2 1 1 0 1 1 0 0 1 1 1 0 2 1 0 0 1 2 1 2 1 2 2 0 1
# 0 1 2 2 0 1 2 1]
print(y_test)
# [0 1 1 0 2 1 2 0 0 2 1 0 2 1 1 0 1 1 0 0 1 1 1 0 2 1 0 0 1 2 1 2 1 2 2 0 1
# 0 1 2 2 0 2 2 1]
print(knn.score(X_test,y_test))
# 0.977777777778
6.KNN優缺點
6.1優點
- 即可處理分類也可處理迴歸問題。
- 對資料沒有假設,準確度高,對異常點不敏感。
- 比較適合樣本容量大的類域進行自動分類,對樣本容量較小的類域容易產生誤分。
- 主要靠周圍有限的鄰近樣本進行分類或迴歸,比較適合類域交叉或重疊較多的待分樣本集。
6.2缺點
- 計算量大,尤其是特徵維數較多時候。
- 樣本不平衡時,對稀有類別的預測準確率低。
- KD樹、球樹之類的模型建立時需要大量的記憶體。
- 使用懶惰學習方法,基本上不學習,導致預測時速度較慢。
7.推廣
更多內容請關注公眾號謂之小一,若有疑問可在公眾號後臺提問,隨時回答,歡迎關注,內容轉載請註明出處。

參考
相關推薦
機器學習之K近鄰(KNN)演算法
1.KNN簡介 K近鄰(K-Nearest Neighbors, KNN)演算法既可處理分類問題,也可處理迴歸問題,其中分類和迴歸的主要區別在於最後做預測時的決策方式不同。KNN做分類預測時一般採用多數表決法,即訓練集裡和預測樣本特徵最近的K個樣本,預測結果為裡
機器學習之K近鄰演算法 kNN(1)
可以說kNN是機器學習中非常特殊的沒有模型的演算法,為了和其他演算法統一,可以認為新聯資料集就是模型本身 1. kNN演算法基本實現 import numpy as np import ma
機器學習之K近鄰演算法 kNN(2)
1.knn演算法的超引數問題 """ 超引數 :執行機器學習演算法之前需要指定的引數 模型引數:演算法過程中學習的引數 kNN演算法沒有模型引數 kNN演算法中的k是典型的超引數 尋找最好的k """ from
機器學習之K-近鄰(KNN)算法
實戰 http created 以及 dex mda 問題 可以轉化 占比 一 . K-近鄰算法(KNN)概述 最簡單最初級的分類器是將全部的訓練數據所對應的類別都記錄下來,當測試對象的屬性和某個訓練對象的屬性完全匹配時,便可以對其進行分類。但是怎麽可能所有測
機器學習之決策樹 機器學習之K-近鄰演算法
都說萬事開頭難,可一旦開頭,就是全新的狀態,就有可能收穫自己未曾預料到的成果。從2018.12.28開始,決定跟隨《機器學習實戰》的腳步開始其征程,記錄是為了更好的監督、理解和推進,學習過程中用到的資料集和程式碼都將上傳到github 機器學習系列部落格:(1) 機器學習之K-近鄰演算法
機器學習之K-近鄰演算法(二)
本章內容: K-近鄰分類演算法 從文字檔案中解析和匯入資料 使用matplotlib建立擴散圖 歸一化數值 2-1 K-近鄰演算法概述 簡單的說,K-近鄰演算法採用測量不同特徵值之間的距離方法進行分類。 K-近鄰演算法 優點:精度高、對異常
機器學習之K-近鄰演算法程式碼分析
在看Peter的K-近鄰實戰時,發現原來“手寫識別系統”不止是影象處理和影象識別可以解決,原來從影象也是矩陣資料的層面來看,不同數字的識別也是資料分類問題(2333……又打開了思維的新視角)。因本身是學影象處理出身,所以關於手寫識別系統,思維受限在怎樣進行影象處理、怎樣訓練數字模型、怎樣進行數字識別了。 該
機器學習之k-近鄰算法實踐學習
ats mst 優化 slab 影響 nor min tex 存在 關於本文說明,筆者原博客地址位於http://blog.csdn.net/qq_37608890,本文來自筆者於2017年12月04日 22:54:26所撰寫內容(http://blog.cs
機器學習之K近鄰算法
特征值 測量 k-近鄰算法 問題 概率 產生 數據 png com 近在學習《機器學習實戰》這本書,做了一些筆記,和大家分享下: 一 、K-近鄰算法(KNN)概述 最簡單最初級的分類器是將全部的訓練數據所對應的類別都記錄下來,當測試對象的屬性和某個訓練對象的屬性完
機器學習實戰k近鄰演算法(kNN)應用之手寫數字識別程式碼解讀
from numpy import * from os import listdir import operator import time #k-NN簡單實現函式 def classify0(inX,dataSet,labels,k): #求出樣本集的行數,也就是labels標籤的數目
機器學習之K-最近鄰規則分類(KNN)演算法
準備分為兩個部分,一個是理論,一個就是程式碼實現。程式碼也可以在我的GitHub上下載,後面有連結。 一、理論知識 相信我的筆記還是比較詳細的 二、程式碼實現KNN演算法 1. 首先要生成一些資料集,以供訓練和測試 我造的資料是關於通過身高
小白python學習——機器學習篇——k-近鄰演算法(KNN演算法)
一、演算法理解 一般給你一資料集,作為該題目的資料(一個矩陣,每一行是所有特徵),而且每一組資料都是分了類,然後給你一個數據,讓這個你預測這組資料屬於什麼類別。你需要對資料集進行處理,如:歸一化數值。處理後可以用matplotlib繪製出影象,一般選兩個特徵繪製x,y軸,然後核心是計算出預測點到
機器學習實戰—k近鄰演算法(kNN)02-改進約會網站的配對效果
示例:使用k-近鄰演算法改進約會網站的配對效果 在約會網站上使用k-近鄰演算法: 1.收集資料:提供文字檔案。 2.準備資料:使用Python解析文字檔案。 3.分析資料:使用matplotlib畫二維擴散圖。 4.訓練演算法:此步驟不適用於k-近鄰演
《機器學習實戰》讀書筆記2:K-近鄰(kNN)演算法 & 原始碼分析
宣告:文章是讀書筆記,所以必然有大部分內容出自《機器學習實戰》。外加個人的理解,另外修改了部分程式碼,並添加了註釋 1、什麼是K-近鄰演算法? 簡單地說,k-近鄰演算法採用測量不同特徵值之間距離的方法進行分類。不恰當但是形象地可以表述為近朱者赤,近墨者黑
機器學習經典演算法詳解及Python實現--K近鄰(KNN)演算法
轉載http://blog.csdn.net/suipingsp/article/details/41964713 (一)KNN依然是一種監督學習演算法 KNN(K Nearest Neighbors,K近鄰 )演算法是機器學習所有演算法中理論最簡單,最好理解的。KNN
《機器學習系統設計》之k-近鄰分類演算法
前言: 本系列是在作者學習《機器學習系統設計》([美] WilliRichert)過程中的思考與實踐,全書通過Python從資料處理,到特徵工程,再到模型選擇,把機器學習解決問題的過程一一呈現。書中設計的原始碼和資料集已上傳到我的資源:http://downloa
機器學習實戰 k-近鄰算法 實施kNN分類算法
OS 環境 clas attr blog 環境變量 變量 技術 機器學習 2.預測數據分類時,出現 ‘dict’ object has no attribute ‘iteritems‘ 如: 最常見的解決辦法是 更改環境變量順序 如 註意:哪個版本在上面,cmd
機器學習:K近鄰演算法,kd樹
https://www.cnblogs.com/eyeszjwang/articles/2429382.html kd樹詳解 https://blog.csdn.net/v_JULY_v/article/details/8203674 一、K-近鄰演算法(KNN)概述
機器學習實戰——k-近鄰演算法Python實現問題記錄
準備 kNN.py 的python模組 from numpy import * import operator def createDataSet(): group = array([[1.0,1.1],[1.0,1.0],[0,0],[0,0.1]])
ML-61: 機器學習之K均值(K-Means)聚類演算法含原始碼
機器學習之K均值聚類演算法1 演算法原理2 演算法例項3 典型應用參考資料 機器學習分為監督學習、無監督學習和半監督學習(強化學習)。無監督學習最常應用的場景是聚類(clustering)和降維(dimension reduction)。聚類演算法包括:K均值