
kinect v2 移動電源配置
參考 【1】:https://www.cnblogs.com/yuanlibin/p/7617801.html(Kinect v2配置移動電源解決方案)
【2】:http://www.itxpower.net/gsxw-14527.htm (電源介面卡音叉和直插DC插頭常見規格)
【3】:http://www.hugesky.com/showarticle.php?id=6499 (電源介面卡音叉和直插DC插頭常見規格)
【4】:https://item.taobao.com/item.htm?spm=a1z09.2.0.0.292426a5inkCQ9&id=527800315141&_u=1qmukjh0d6e
一 。Kinect V2 介面卡輸出 為 12v 直流 0.67A
介面卡和集線器的介面 是4.5*3.0 mm (資料引用:【1】【4】)
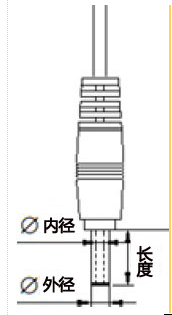
替代的電源為 8400mAh的鋰電池,介面為DC 5.5*2.1 這個資料指的是公頭內外徑寬度。 (資料引用:【2】)
5.5×2.1常見於12V,如路由器,(資料引用:【3】)
二 資料中談到的音叉型和直插型如下。
右音叉
相關推薦
kinect v2 移動電源配置
參考 【1】:https://www.cnblogs.com/yuanlibin/p/7617801.html(Kinect v2配置移動電源解決方案) 【2】:http://www.itxpower.net/gsxw-14527.htm (電源介面卡音叉和直插DC插頭常見規格)
kinect V2 直流電源方案
ROS http://www.cnblogs.com/hitcm/p/5118196.html Kinectv2 標定 https://github.com/code-iai/iai_kinect2/tree/master/kinect
Kinect v2(Microsoft Kinect for Windows v2 )配置移動電源解決方案
Kinect v2配置移動電源解決方案 Kinect v2如果用於移動機器人上(也可以是其他應用場景),為方便有效地展開後續工作,為其配置移動電源是十分必要的。 一、選擇移動電源 Kinect v2原裝電源介面卡引數(詳見下圖1所示): 交流輸入: 100V-240V~0.68A, 50/60Hz; 直流輸出
Ubuntu14.04下安裝opencv及ROS Indigo下配置Kinect V2
Ubuntu14.04下安裝opencv及ROS Indigo下配置Kinect V2 本篇文章是我在配置Kinect V2時的一些記錄,參考了一些前人的經驗部落格,並把遇到的問題記錄了下來。但之前儲存在了word裡面,出現了一些亂碼,這是我盡力修改了之後的結果,但也難免哪裡會出錯,還請
kinect v2
kinect uic ann you article ria owa .html unity http://www.tuicool.com/articles/NbmyyeU https://channel9.msdn.com/Blogs/raw-tech/Making-y
標定Kinect v2彩色攝像頭:使用iai_kinect2,采用qhd(960*540)大小的彩色圖像
路徑 相同 release www 分享 程序 image string 步驟 開篇一作,這篇博文是純應用的,沒有任何理論說明,就當是一個實踐提醒啦。 安裝kinect v2相機驅動和標定程序得益於下面二位前輩的引薦工作: http://www.cnblogs.com/ga
Appium移動自動化配置-ios&安卓
andro android 執行c ppi code java_home com 設置 tor Appium安裝 1.安裝nodejs 2.安裝appium iOS側環境安裝 1.安裝xcode 2.安裝Xcode Command Line Tools 安卓側環境安
人體發電:以後我們就是自己的移動電源
應該 場景 一種可能 效果 問題 傳輸 str 新的 體育 電可以說是人類有史以來最偉大的發現,它構成了我們現代一切生活的基礎。現在的地球,即便是瞬間的世界性斷電,其後果也是難以想象的。因此,隨著電器越來越多地被發明出來,人類對電力的需求也日益旺盛。為此,人類為了發電,幾乎
電子秤,廚房秤,臺燈,手表,智能數字電子表、小家電,移動電源,MP3觸摸,4按鍵感應/四通道觸控IC
3.1 n-1 資料 真誠 0ms 員工 工作 介紹 按鍵 我們的優勢:1:我司為VINTE/臺灣元泰半導體股份有限公司/VINKA的獨家授權大中華區代理商,產品渠道正宗,確保原裝正品,大量庫存現貨,客戶批量不懼假貨!2:公司工程力量雄厚,真誠技術服務支持,搭配原廠服務各種
Ubuntu 16.04 安裝Kinect V2驅動
open clone glut proto 執行 onf sta 適配 lfw 1.下載源代碼 git clone https://github.com/OpenKinect/libfreenect2.git 2.依賴項安裝 sudo apt-get install
[資料共享] 多個創意移動電源例項教程
Vicor是一家專注於電源技術研發的美國電源廠商,廣泛應用於企業級和高效能運算機、電信和網路基礎設施、工業裝置與自動化、交通、航空、國防電子等市場。總之,Vicor公司主要致力於電源模組的設計。說到電源模組,我們是不是可以將平時的移動電源模組話呢,下面給大家分享幾個移動電源方面的設計。 &nbs
Ubuntu 16.04 安裝 CUDA 9.0 + Kinect V2 安裝與使用
更多SLAM相關文章請參閱 SLAM專欄 這篇文章的目的是為了在Ubuntu 16.04下使用 Kinect V2。 Kinect V2的使用需要配準的彩色影象和深度圖。彩色影象和深度圖的註冊是一個計算力要求很高的過程,一般需要GPU。一般的膝上型電腦會有整合的Intel顯示卡和Nv
VS2013 + Kinect v2.0 + infiniTAM 三維重建
最近在做深度相機進行三維重建的工作,想配置一下非常有名的Kinect Fusion,也就是 PCL_KinFu 這個功能,PCL的庫很好配,但是 KinFu 就異常難配了,windows下試了5次左右沒有成功,每次都是最後編譯生成出一部分的exe和dll,但是就是沒有跟 kinfu 有關的,然後在U
Ubuntu14.04系統下Kinect v2點雲圖的生成
Kinect v2為深度相機,能夠額外得到影象的深度資訊。如下圖 ,最近在Ubuntu14.04系統下,成功連線上了Kinect v2. 參考了下面的部落格,但是過程並不順利。 http://www.cnblogs.com/hitcm/p/5118196.h
LiveScan3D: A Fast and Inexpensive 3D Data Acquisition System for Multiple Kinect v2 Sensors
LiveScan3D:用於多個Kinect v2感測器的快速、低成本的3D資料採集系統 文章翻譯 引言:我們提出了一種利用多個Kinect v2感測器進行實時3D採集的方法。與使用單個感測器的方法不同,比如[1],我們可以同時記錄多個視點的動態場景。 我
Kinect V2的精度及V1的比較
先給出結論,KinectV2的精度在2mm~4mm左右,距離越近精度越高,越遠精度稍微差點。對於日常互動的使用,這已經算很高的精度了。 他們測試了五種引數: 他們在多個位置進行測量,得到kinectV2在不同位置的精度分佈如下圖的結論: 右側大三角是Ki
Kinect v2.0 + infiniTAM 三維重建
最近在做深度相機進行三維重建的工作,想配置一下非常有名的Kinect Fusion,也就是 PCL_KinFu 這個功能,PCL的庫很好配,但是 KinFu 就異常難配了,windows下試了5次左右沒有成功,每次都是最後編譯生成出一部分的exe和dll,但是就是沒有跟 ki
ros kinect v2安裝時輸入./bin/Protonect遇到的錯誤
[Debug] [DepthPacketStreamParser] not all subsequences received 0 [Debug] [DepthPacketStreamParser] not all subsequences received 4 [Debug
使用Kinect V2製作自己的圖片資料集並跑通ORB_SLAM2
使用Kinect V2製作自己的圖片資料集並跑通ORB_SLAM2 一、使用Kinect V2採集圖片資料集 參考部落格:https://blog.csdn.net/sunbibei/article/details/51594824 出發點是使用Kinect V2製作一個自己的圖
Kinect V2標定
Kinect V2標定 官方教程: https://github.com/code-iai/iai_kinect2/tree/master/kinect2_calibration#calibrating-the-kinect-one 參考教程: https://blog.cs