
opencv直線檢測直線提取演算法與總結
有些情況, 我們會需要提取直線的詳細引數, 下面介紹如何提取直線
霍夫變換(Hough Transformation)
其中很大一部分都在應用霍夫變換 及其 各種版本來提取直線
這裡個人總結下: 霍夫變換的基本思想, 將原本的平面曲線引數方程轉化成 , 以曲線上點作為已知,
把曲線方程的引數當作未知項, 在引數空間作出圖形.(原本已知所有引數時可以求出曲線上的這些點)
當交於某公共點上圖形最多時(peak), 這個公共點(peak)對應的引數便可作為整個圖形的引數.
霍夫變換最開始提出來時, 直線方程用的是斜截式
因為考慮到直線兩種極端情況, 水平和豎直
所以按斜率是否大於1, 使用了不同的方程
k < 1 時 y = kx +b
k>=1 時 y = 1/k x + 1/b
就避免了因為 y = mx + c 中 m,c 過大而不好討論(m,c代表直線方程的引數)
ρ = x cos θ + y sin θ
來表示直線, 也就是現在常見的表示形式
提供了減少計算量的方法
最好看看hough變換的原始碼, 因為opencv只提供了直線和圓的函式, 其他的需要自己去寫
下面示例下opencv霍夫變換函式的使用
注: sobel運算元使用的方法不太正確, 這裡僅作示例用. 兩圖求得的edge不一樣
cv::MatG,Gx,Gy,G_otsu;
cv::Sobel(srcEmpty,Gx,CV_8U,1,0,3);
cv::Sobel(srcEmpty,Gy,CV_8U,0,1,3);
G=Gx+Gy;
cv::threshold(G,G_otsu,0,255,cv::THRESH_OTSU);
if(debugflag)
cv::imshow("Edge",G_otsu);
cv::Matdst(srcEmpty.size(),CV_8UC3);
std::vector<cv::Vec2f>lines;
cv::HoughLines(G_otsu,lines,1,CV_PI/180,30,0,0);
for(size_ti=0;i<lines.size();i++){
floatrho=lines[i][0];
floattheta=lines[i][1];
doublea=cos(theta),b=sin(theta);
doublex0=a*rho,y0=b*rho;
cv::Pointpt1(cvRound(x0+1000*(-b)),cvRound(y0+1000*(a)));
cv::Pointpt2(cvRound(x0-1000*(-b)),cvRound(y0-1000*(a)));
cv::line(dst,pt1,pt2,cv::Scalar(0,0,255),3,8);
}
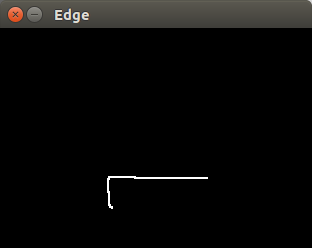
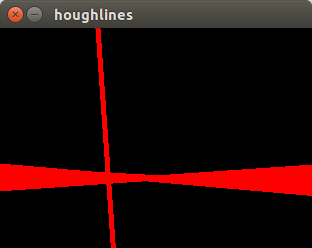
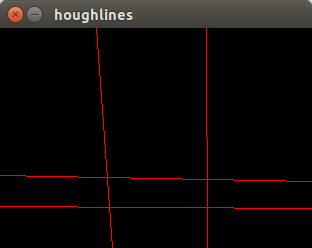
可以看到, 找出的直線並沒有邊界(直線的兩端點)
至於為什麼會出現右圖多條直線的那種情況
因為用於投票的閾值
太高只能提取長線, 短線被忽略
太低又會出現多條, 這種情況, 不好確定閾值
這個時候如果單單是呼叫houghLines的話, 可能不會有太好的結果
再來看houghLinesP的使用
std::vector<cv::Vec4i>lines;
cv::HoughLinesP(srcEmpty,lines,1,CV_PI/180,20,20,20);
std::cout<<lines.size()<<std::endl;
for(size_ti=0;i<lines.size();i++){
cv::line(dst,cv::Point(lines[i][0],lines[i][1]),
cv::Point(lines[i][2],lines[i][3]),cv::Scalar(0,0,255),3,8);
}
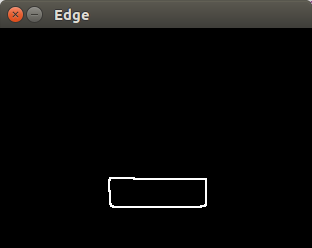
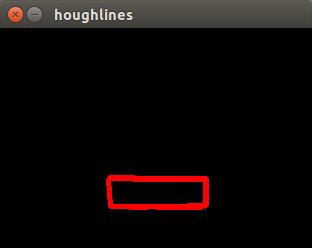

看起來好多了.但是我們看看本意提取的四條線
cout << line.size() 的結果是8條
而且選定的引數也僅僅是針對這個邊緣, 稍微變化一點引數又要變化
可以的話, 對兩端點之內相交的線段, 定義夾角範圍多少以內是同一條邊,
在這些邊選取最長的線段作為整條邊
對於本情況, 需要的並不是提取所有直線, 而是根據這個edge的特點, 找到四條滿足大部分點的直線
因此, opencv所提供的兩個霍夫變換並不適合這種情況
(重點在對邊緣直線長度未知的情況下, 沒有很好的引數適用大部分情況)
需要對函式根據需要進行一些修改
例如
原圖:

結果:
注 : 改動部分為 由返回符合threshold的多條直線, 變為 返回獲得票數最高的直線
RANSAC
在opencv中, 涉及到ransac的函式只有跟立體標定有關所以想直接調函式的還是不要想opencv了吧
本人所寫的ransac 函式, 僅供參考 , 傳送門: 我的github
http://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html
http://grunt1223.iteye.com/blog/961063
關於RANSAC c++程式碼 很抱歉這裡沒有進行實驗, 請自行甄別
https://github.com/srinath1905/GRANSAC/blob/master/include/GRANSAC.hpp
http://reference.mrpt.org/stable/classmrpt_1_1math_1_1_r_a_n_s_a_c___template.html 及
https://github.com/MRPT/mrpt/blob/9f72d70abe8db107f7331f3723cf2553d7c307d0/libs/base/include/mrpt/math/ransac.h
https://github.com/MRPT/mrpt/blob/9f72d70abe8db107f7331f3723cf2553d7c307d0/libs/base/src/math/ransac.cpp
及
http://www.mrpt.org/tutorials/programming/maths-and-geometry/ransac-c-examples/
要使用RANSAC擬合直線, 我們首先需要三個引數
1.The Number of Samples Required
假設我們需要畫n個點(對於擬合直線來說, 最少需要兩個點; 對於圓則最少需要三個.),
其中w是其中好點(good points, 有效點?)所佔的比例,
則需要畫的次數(the number of draws k)的期望值是
E[k] = w ^ (-n)
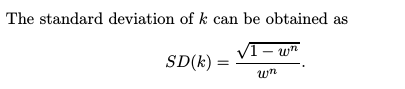
假設當只有bad samples 出現的概率為 z
則
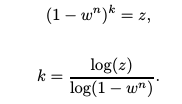
這三種方法都可以求出k
其中每個sample裡面包括the abstraction of interest所需要的最少點.
2.Telling Whether a Point Is Close 距離直線的最大距離的點
3.The Number of Points That Must Agree (在前面所確定的距離內) 需要最少個數的點
對於本情況, 對四條線段使用 RANSAC, 具體的想法是:
1. 對一組點集用投票法找出最高票數的直線, 找出peak後並刪掉peak對應的資料
2. 找出下一條直線, 同樣找出並刪除對應的資料
3. 就這樣迴圈, 直到找出4條直線, 終止

來源: computer vision : a modern approatch
擬合法
相對於RANSAC對噪聲不敏感, 因為擬合法是對當前所有的點進行的, 內在並沒有一個檢測和去除
壞點(gross point)的機制[Matin and Robert, 1980], 除了提供儘可能大的相關資料外
使用擬合法之前一定要把儘量無關的點去除
擬合法在前面常提的課件(www.cse.psu.edu) , lecture14 有講,
以最小二乘法為例
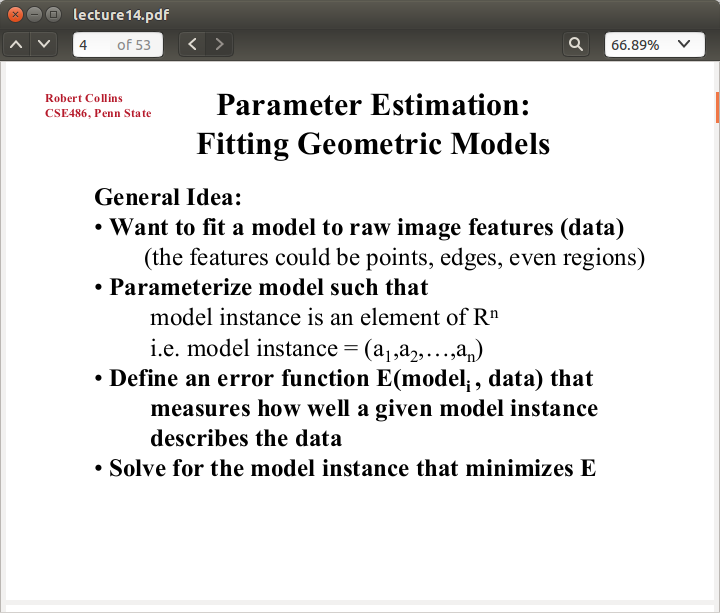
比如直線點斜式方程
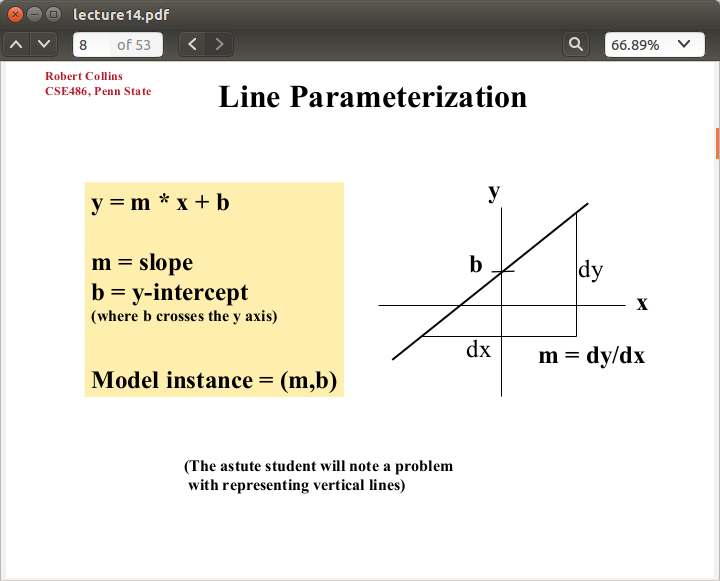
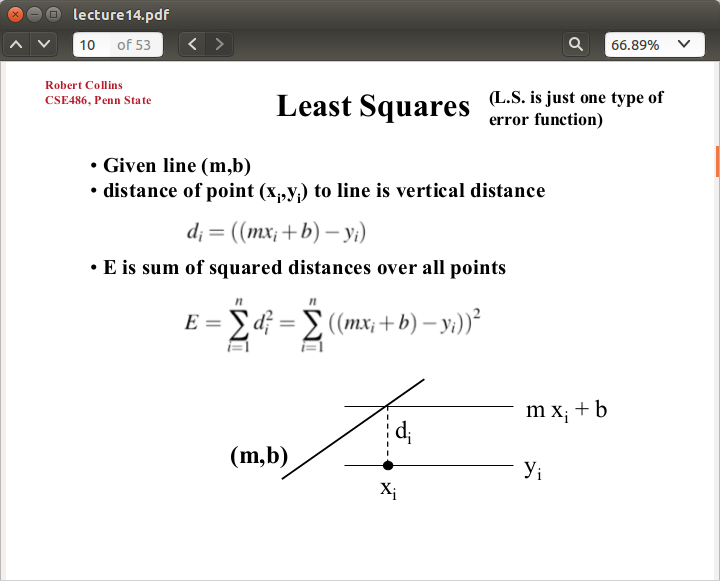
圖片來源: http://www.cse.psu.edu/~rtc12/CSE486/
對於直線一般方程, 一樣的原理,
ax+ by +c = 0 = d0
di = axi + byi +c
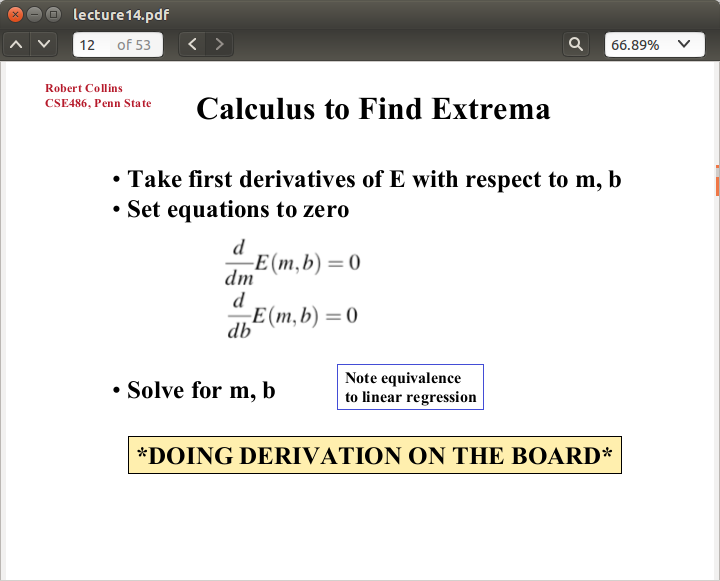
E(a,b,c) = ⅀ (di - d0 ) ^2
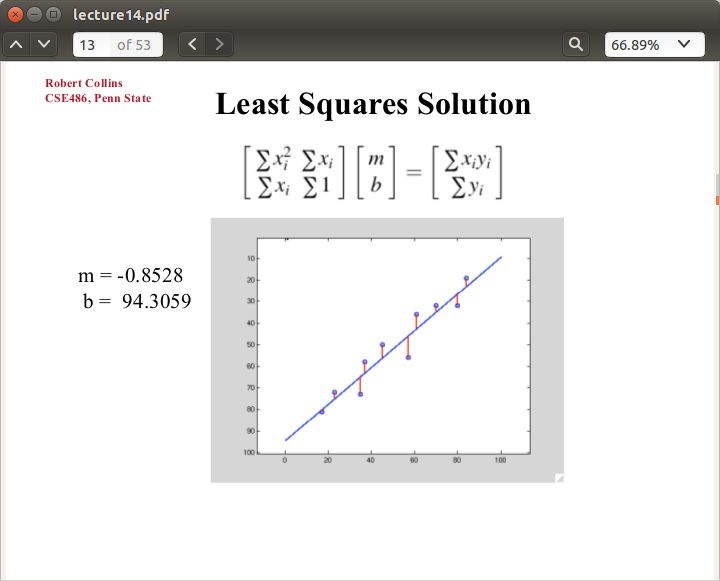
求導 , 令導數為0, 就得到了 可以求解(a,b,c) 方程組
注意當所有點都在同一條直線上時, 方程組的引數矩陣的一個特徵值為0, 此時齊次方程有無數多的解.
詳細請自尋
opencv提供了直線擬合法函式fitLine(), 我用的3.1.0 調了很久都沒有調通, 高度懷疑此處存在bug,具體點選這裡
fitLine原始碼在下面,後面列出了引數參考
用上面的存放edge影象的Mat時會出現
OpenCV Error: Assertion failed (npoints2 >= 0 || npoints3 >= 0) in fitLine,
file /home/tau/opencv/opencv-3.1.0/modules/imgproc/src/linefit.cpp, line 603 terminate called after throwing an instance of 'cv::Exception' what(): /home/tau/opencv/opencv-3.1.0/modules/imgproc/src/linefit.cpp:603:
error: (-215) npoints2 >= 0 || npoints3 >= 0 in function fitLine
哪裡出了問題呢? 我們來試試看看fitLine原始碼吧, 原始碼在下面
opencv 3.0 對這一部分用c++ 重寫了一遍, 當然這裡呼叫了c函式的FitLine2D, 這裡不去深究
在這個函式發現錯誤提示來自這裡
CV_Assert( npoints2 >= 0 || npoints3 >= 0
而int npoints2 = points.checkVector(2, -1, false);
函式的功能是: 當Mat的channels,depth,和連續性 滿足checkVector的引數內容時,
返回(int)(total()*channels()/_elemChannels), 否則返回-1
看出問題沒有?
因為存放edge的Mat是連續的, 而checkVector(2,-1,false)要求是不連續的, 所以被返回了-1
且npoints2與npoints3 都被返回了-1
怎麼解決呢?
首先肯定要想怎麼把畫素值不為0的點提取出來, 存成vector或Mat,
用findContours之類的. 或是乾脆自己將edge分成四段線段,這樣也避免了四條線相互影響
雖然對於上面的edge四條線段確實可以用四條直線擬合,
但是我還沒有想好怎麼方便把四條線段上的點分別存放, 以便直接使用fitLine
既然想到了findContours, 那就是把存放edge的Mat資料的非零點存成點集.
在這裡, 我先用了角點檢測將完整的edge打斷成四條線段, 但是不知道什麼原因fitline函式總是無法正常執行
所以等到解決後再更新本文吧
關於points.checkVector()
| int cv::Mat::checkVector | ( | int | elemChannels, |
| int |
depth = -1, |
||
| bool |
requireContinuous = true |
||
| ) | const |
returns N if the matrix is 1-channel (N x ptdim) or ptdim-channel (1 x N) or (N x 1); negative number otherwise
雖然未對depth與requireContinuous進行說明,但從命名上看應該能看明白吧
int Mat::checkVector(int _elemChannels, int _depth, bool _requireContinuous) const
{
return (depth() == _depth || _depth <= 0) && (isContinuous() || !_requireContinuous) &&
((dims == 2 && (((rows == 1 || cols == 1) && channels() == _elemChannels) ||(cols == _elemChannels && channels() == 1))) ||
(dims == 3 && channels() == 1 && size.p[2] == _elemChannels && (size.p[0] == 1 || size.p[1] == 1) &&
(isContinuous() || step.p[1] == step.p[2]*size.p[2])))
? (int)(total()*channels()/_elemChannels) : -1;
}
void cv::fitLine( InputArray _points, OutputArray _line, int distType, double param, double reps, double aeps )
{
Mat points = _points.getMat();
float linebuf[6]={0.f};
int npoints2 = points.checkVector(2, -1, false);
int npoints3 = points.checkVector(3, -1, false);
CV_Assert( npoints2 >= 0 || npoints3 >= 0 );
if( points.depth() != CV_32F || !points.isContinuous() )
{
Mat temp;
points.convertTo(temp, CV_32F);
points = temp;
}
if( npoints2 >= 0 )
fitLine2D( points.ptr<Point2f>(), npoints2, distType, (float)param, (float)reps, (float)aeps, linebuf);
else
fitLine3D( points.ptr<Point3f>(), npoints3, distType, (float)param, (float)reps, (float)aeps, linebuf);
Mat(npoints2 >= 0 ? 4 : 6, 1, CV_32F, linebuf).copyTo(_line);
}
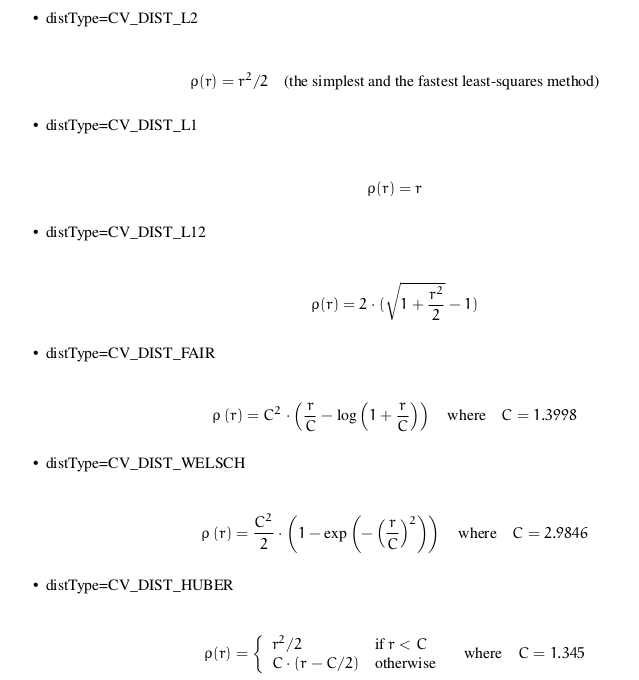
其中distType可選引數
| points | Input vector of 2D or 3D points, stored in std::vector<> or Mat. |
| line | Output line parameters. In case of 2D fitting, it should be a vector of 4 elements (like Vec4f) - (vx, vy, x0, y0), where (vx, vy) is a normalized vector collinear to the line and (x0, y0) is a point on the line. In case of 3D fitting, it should be a vector of 6 elements (like Vec6f) - (vx, vy, vz, x0, y0, z0), where (vx, vy, vz) is a normalized vector collinear to the line and (x0, y0, z0) is a point on the line. |
| distType | Distance used by the M-estimator, see cv::DistanceTypes |
| param | Numerical parameter ( C ) for some types of distances. If it is 0, an optimal value is chosen. |
| reps | Sufficient accuracy for the radius (distance between the coordinate origin and the line). |
| aeps | Sufficient accuracy for the angle. 0.01 would be a good default value for reps and aeps. |
void HoughLines( InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0,
double stn=0 )
image – 8-bit, single-channel binary source image. The image may be modified by the function.
lines – Output vector of lines. Each line is represented by a two-element vector (ρ, θ) .
ρ is the distance from the coordinate origin (0, 0) (top-left corner of the image). θ is the line
rotation angle in radians ( 0 ∼ vertical line, π/2 ∼ horizontal line ).
rho – Distance resolution of the accumulator in pixels.
theta – Angle resolution of the accumulator in radians.
threshold – Accumulator threshold parameter. Only those lines are returned that get enough votes ( > threshold ).
srn – For the multi-scale Hough transform, it is a divisor for the distance resolution rho .
The coarse accumulator distance resolution is rho and the accurate accumulator resolution
is rho/srn . If both srn=0 and stn=0 , the classical Hough transform is used. Otherwise,
both these parameters should be positive.
stn – For the multi-scale Hough transform, it is a divisor for the distance resolution theta .
method – One of the following Hough transform variants:
– CV_HOUGH_STANDARD classical or standard Hough transform. Every line is repre-
sented by two floating-point numbers (ρ, θ) , where ρ is a distance between (0,0) point
and the line, and θ is the angle between x-axis and the normal to the line. Thus, the matrix
must be (the created sequence will be) of CV_32FC2 type
– CV_HOUGH_PROBABILISTIC probabilistic Hough transform (more efficient in case
if the picture contains a few long linear segments). It returns line segments rather than
the whole line. Each segment is represented by starting and ending points, and the matrix
must be (the created sequence will be) of the CV_32SC4 type.
– CV_HOUGH_MULTI_SCALE multi-scale variant of the classical Hough transform.
The lines are encoded the same way as CV_HOUGH_STANDARD .
void HoughLinesP( InputArray image, OutputArray lines, double rho, double theta, int threshold,
double minLineLength=0, double maxLineGap=0 )
image – 8-bit, single-channel binary source image. The image may be modified by the function.
lines – Output vector of lines. Each line is represented by a 4-element vector (x 1 , y 1 , x 2 , y 2 ),
where (x 1 , y 1 ) and (x 2 , y 2 ) are the ending points of each detected line segment.
rho – Distance resolution of the accumulator in pixels.
theta – Angle resolution of the accumulator in radians.
threshold – Accumulator threshold parameter. Only those lines are returned that get enough votes ( > threshold ).
minLineLength – Minimum line length. Line segments shorter than that are rejected.
maxLineGap – Maximum allowed gap between points on the same line to link them.
今天接觸到LSD演算法 http://blog.csdn.net/carson2005/article/details/9326847 改天增加這部分內容
http://docs.opencv.org/master/d1/dbd/classcv_1_1line__descriptor_1_1LSDDetector.html#gsc.tab=0
相關推薦
opencv直線檢測直線提取演算法與總結
有些情況, 我們會需要提取直線的詳細引數, 下面介紹如何提取直線 霍夫變換(Hough Transformation) 其中很大一部分都在應用霍夫變換 及其 各種版本來提取直線 這裡個人總結下: 霍夫變換的基本思想, 將原本的平面曲線引數方程轉化成 ,
OpenCV邊緣檢測三種演算法(canny、sobel、laplacian)
Canny演算法 #include<opencv2\opencv.hpp> #include<opencv2\highgui\highgui.hpp> using namespace std; using namespace cv; //邊緣檢測 int mai
OpenCV的ORB特徵提取演算法
看到OpenCV2.3.1裡面ORB特徵提取演算法也在裡面了,套用給的SURF特徵例子程式改為ORB特徵一直提示錯誤,型別不匹配神馬的,由於沒有找到示例程式,只能自己找答案。(ORB特徵論文:ORB: an efficient alternative to SIFT or S
opencv目標檢測之canny演算法
canny canny的目標有3個 低錯誤率 檢測出的邊緣都是真正的邊緣 定位良好 邊緣上的畫素點與真正的邊緣上的畫素點距離應該最小 最小響應 邊緣只能標識一次,噪聲不應該標註為邊緣 canny分幾步 濾掉噪聲 比如高斯濾波 計算梯度 比如用索貝爾運算元算出梯度 非極大值抑制 上一步算出來的邊緣可能比較
python opencv -詳解hough變換檢測直線與圓
在數字影象中,往往存在著一些特殊形狀的幾何圖形,像檢測馬路邊一條直線,檢測人眼的圓形等等,有時我們需要把這些特定圖形檢測出來,hough變換就是這樣一種檢測的工具。 Hough變換的原理是將特定圖形上的點變換到一組引數空間上,根據引數空間點的累計結果找到一個極大值對應的解,那麼這個解就對應著要尋找的幾何形狀
Python下opencv使用筆記(十一)(詳解hough變換檢測直線與圓)
在數字影象中,往往存在著一些特殊形狀的幾何圖形,像檢測馬路邊一條直線,檢測人眼的圓形等等,有時我們需要把這些特定圖形檢測出來,hough變換就是這樣一種檢測的工具。 Hough變換的原理是將特定圖形上的點變換到一組引數空間上,根據引數空間點的累計結果找到一個極
OpenCV---直線檢測
https waitkey show 情況 曲線 open 數組 邊界 win 直線檢測相關 Opencv學習筆記-----霍夫變換直線檢測及原理理解 OpenCV-Python教程(9、使用霍夫變換檢測直線) Hough變換是經典的檢測直線的算法。其最初用來檢測圖像中
Python+OpenCV圖像處理(十四)—— 直線檢測
gap mat rgb2gray inf 單位 imshow width 結果 pre 簡介: 1.霍夫變換(Hough Transform) 霍夫變換是圖像處理中從圖像中識別幾何形狀的基本方法之一,應用很廣泛,也有很多改進算法。主要用來從圖像中分離出具有某種相同特征的幾何
opencv-霍夫直線變換與圓變換
計算機視覺 讓我 ali nsf ofo 統一 range 即使 round 轉自:https://blog.csdn.net/poem_qianmo/article/details/26977557 一、引言 在圖像處理和計算機視覺領域中,如何從當前的圖像中提取所
opencv 簡單的檢測直線
//2.4.0 #include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/im
opencv學習(二十):直線檢測
霍夫直線檢測原理: 1、對於直角座標系中的任意一點A(x0,y0),經過點A的直線滿足Y0=k*X0+b.(k是斜率,b是截距) 2、那麼在X-Y平面過點A(x0,y0)的直線簇可以用Y0=k*X0+b表示,但對於垂直於X軸的直線斜率是無窮大的則無法表示。因此將直角座標系轉換到極座標系就能解
影象處理中,SIFT,FAST,MSER,STAR等特徵提取演算法的比較與分析(利用openCV實現)
本人為研究生,最近的研究方向是物體識別。所以就將常用的幾種特徵提取方式做了一個簡要的實驗和分析。這些實驗都是藉助於openCV在vs2010下完成的。基本上都是使用的openCV中內建的一些功能函式。 1. SIFT演算法 尺度不變特徵轉換(Scale-inva
OpenCv-C++-小案例實戰-直線檢測(以及霍夫直線檢測程式碼)
對於一份試卷,我現在需要檢測到填空題上面的橫線。如下圖: 很多人第一反應是霍夫直線檢測,包括我也是想到用霍夫直線檢測。然而事實並不盡如人意。 因為在我的部落格中並沒有放上霍夫直線檢測這一部分,所以,我用霍夫直線演算法來檢測試卷上的橫線。 霍夫直線檢測: #include<op
利用霍夫變換做直線檢測的原理及OpenCV程式碼實現
說白了,以直線檢測為例,霍夫變換實際上就是把使每個畫素座標點經過變換都變成都直線特質有貢獻的統一度量(這種度量以我目前的理解與笛卡爾(極坐系)並無區別,即極半徑和極角),並對轉換後的度量進行累計(可以理解為投票),當一個波峰出現時候,說明有直線存在。如果要了解更詳細的,大
霍夫變換直線檢測houghlines及opencv的實現分析
導讀: 1. houghlines的演算法思想 2. houghlines實現需要考慮的要素 3. houghlines的opencv實現,程式碼分析 4. houghlines的效率分析,改進 1. houghlines的演算法思想 檢測直線,houghlines標準演算
opencv(8)-Canny邊緣檢測+直線檢測+圓檢測+輪廓發現
Canny邊緣檢測 程式碼: # -*- coding=GBK -*- import cv2 import numpy as np # 1.高斯模糊- GaussianBlur # 2.灰度轉換一cvtColor # 3.計算梯度- Sobel/ Schar
目標檢測的影象特徵提取之(四)OpenCV中BLOB特徵提取與幾何形狀分類
OpenCV中BLOB特徵提取與幾何形狀分類一:方法二值影象幾何形狀提取與分離,是機器視覺中重點之一,在CT影象分析與機器人視覺感知等領域應用廣泛,OpenCV中提供了一個對二值影象幾何特徵描述與分析最有效的工具 - SimpleBlobDetector類,使用它可以實現對二
OpenCV - 利用SIFT和RANSAC演算法實現物體的檢測與定位,並求出變換矩陣(findFundamentalMat和findHomography的比較)- 轉
本文目標是通過使用SIFT和RANSAC演算法,完成特徵點的正確匹配,並求出變換矩陣,通過變換矩陣計算出要識別物體的邊界(文章中有部分原始碼,整個工程我也上傳了,請點選這裡)。 SIFT演算法是目前公認的效果最好的特徵點檢測演算法。 整個實現過程可以複述如下:提供兩張初始圖片,一幅為模板影象
Opencv——霍夫變換直線檢測及原理理解
霍夫變換(Hough Transform)是影象處理中的一種特徵提取技術,它通過一種投票演算法檢測具有特定形狀的物體。該過程在一個引數空間中通過計算累計結果的區域性最大值得到一個符合該特定形狀的集合作為霍夫變換結果。霍夫變換於1962年由Paul Hough 首次提出[53],後於1972年由Richard
【學習opencv】實現霍夫變換(1)檢測直線
目前想對於霍夫圓檢測進行修改,想法是若能在固定圓心的橫座標的情景下去搜索圓,若要實現就需要對霍夫檢測有一定的深入瞭解。 霍夫變換原理 霍夫變換原理實則就是引數空間的轉變。 極座標轉換 首先因為直角座標系中垂直於x軸的直線不存在,即轉換用極座標表示