
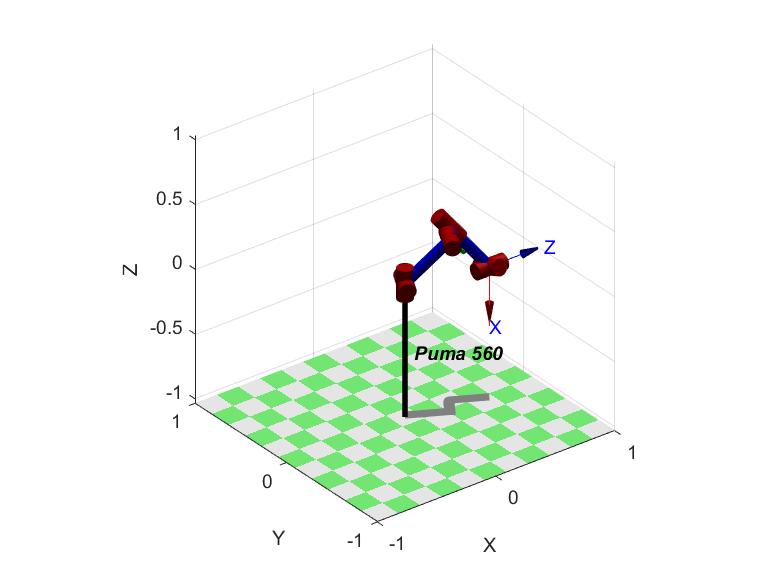
機器人學,機器視覺與控制學習筆記——機械臂運動學
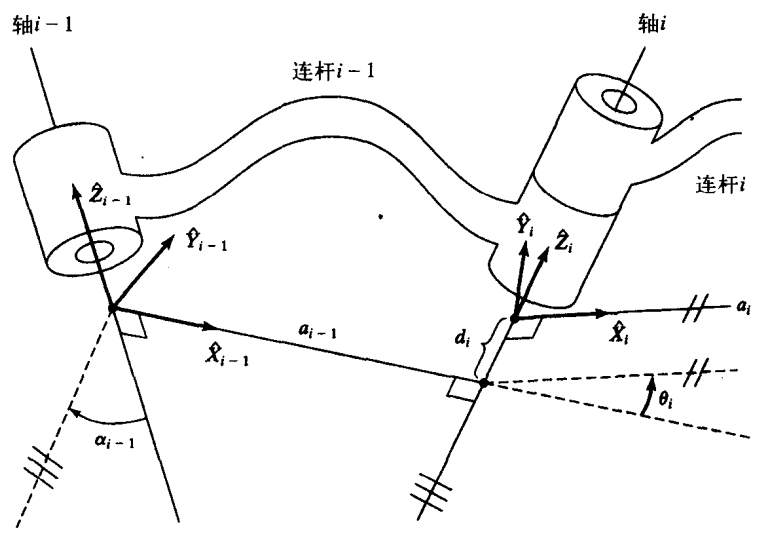
連桿座標系如下

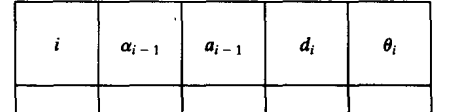
根據連桿座標系可列出D-H表

相關推薦
機器人學,機器視覺與控制學習筆記——機械臂運動學
運動學是力學的一個分支,他在不考慮外力和質量的前提下研究一個物體。機械臂是由一組成為連桿的剛體組成的,連桿之間由關節連線。 分析機械臂運動學的第一步是根據機械臂的構造建立連桿座標系,連桿座標系最常用的方法就是D-H法, D-H法 首先根據下圖確定每個關節座標系的方向,對
機器人學,機器視覺與控制學習筆記——緒論
學習本書及使用本書需要以下本科水平的前期知識:線性代數(矩陣、向量、特徵值),基礎集合論,基礎圖論,概率論,動力學(力、力矩、慣量),拉普拉斯變換和傳遞函式、線性控制(比例控制,比例微分控制、比例積分控制)及控制框圖繪製。另外要求能比較熟練的掌握matlab程式設計,以及面向物件的程式設計技術(如C++,Ja
機器人學、機器視覺與控制:MATLAB算法基礎pdf
算法基礎 顏色 file 驅動器 分類 int otto 力學 平滑 下載地址:網盤下載 內容簡介本書是關於機器人學和機器視覺的實用參考書, 第一部分“基礎知識”(第2章和第3章)介紹機器人及其操作對象的位置和姿態描述,以及機器人路徑和運動的表示方法;第二部分“移動機器人”
Linux之併發與競態控制學習筆記
如何解決競態問題? 保證對共享資源的互斥訪問,指一個執行單元在訪問共享資源的時候,其他的執行單元被禁止訪問。 Linux裝置驅動中可採用的互斥途徑:中斷遮蔽、原子操作、自旋鎖、訊號量以及completion。 中斷遮蔽可以解決中斷與程序之間的併發,也可以解決核心搶佔程序之間的併發。
[計算機視覺:演算法與應用]學習筆記一:影象形成
1. 2D點可以利用一對值(x,y)來表示,也可以利用齊次座標來表示,那麼什麼是齊次座標?用齊次座標表示有什麼優勢? #二維點(x,y)的齊次座標表示為(hx,hy,h)。由此可以看出,一個向量的齊
Hibernate4與Spring4整合,使用Junit4測試相關學習筆記
一、在myeclipse中建立web project 1.匯入Hibernate4.1與Spring4.1的Libraries。其中myeclipse自帶的spring libraries中缺少spring-test.jar包,需要自己從網上下載。mysql與c3p
FPGA機器學習之資料探勘,影象處理,機器視覺,模式識別,人工智慧,機器學習的關係
資料探勘: 資料探勘從字面上就已經很好理解了,就是從一堆資料中,挖掘出一些有用的資訊來的過程。比如說,我們的搜尋資料,如果某個地區大部分人都在搜尋MH370,表示他們在關注這個事情。我們就可以推薦一些安全知識,飛機知識過去。同樣的也可能會有蠟燭銷售高潮
Mohican_2/4 連結,裝載與庫 學習筆記— 溫故而知新 計算機硬體基本結構
第一章 計算機軟硬體基本結構 引言: 本章是對於計算機軟硬體的基本瞭解和回顧,包括大致如下內容: ü CPU與外部件的連線 ü 計算機軟硬體層次結構 ü SMP與多核 ü 作業系統,虛擬空間,物理空間 ü 多訊號 PV原語的理解 ü 對於執行緒和程序的理解,和
肝了很久,冰河整理出這份4萬字的SpringCloud與SpringCloudAlibaba學習筆記!!
# 寫在前面 不少小夥伴讓我整理下有關SpringCloud和SpringCloudAlibaba的知識點,經過3天的收集和整理,冰河整理出這份4萬字的SpringCloud與SpringCloudAlibaba學習筆記!! 文章已收錄到: [https://github.com/sunshinelyz
系統分析與設計學習筆記(一)
學習 掌握 應該 溝通 基本 最終 表示 對象 毫無 為什麽要學習這門課程? “擁有一把錘子未必能成為建築師”。 這門課程學習的是面向對象分析和設計的核心技能的重要工具。對於使用面向對象技術和語言來,創建設計良好、健壯且可維護的軟件來說,這門課程所
C#委托與事件學習筆記
調用函數 msdn http msd proc for reac .net 委托方 今天跟隨視頻學習了一下C#中最重要的一些概念之委托與事件。老楊的視頻講的還是挺深入淺出,不過剛接觸C#.NET的人還是朦朦朧朧,就像張子陽先生說的“每次見到委托和事件就覺得心裏別
人生苦短,我用Python---Python學習筆記之一
http style ... idt logs .py 程序員 tex 環境 Python基礎語法 這一篇文章是寶寶自己寫的哦,哼,不經同意,不準轉載,略略略........ The first 寶寶用的版本是Python2.7,環境配置啥的,網上的教程
GitHub入門與實踐 學習筆記(一)
lac 連接 創建分支 rap 自動 成功 -- repo 哈希 Pull Request 是指開發者在本地對源代碼進行更改後,向 GitHub中托管的 Git 倉庫請求合並的功能。 GitHub 的 Pull Request 不但能輕松查看源代碼的前後差別,還可以對
重定向 302 與localhost 學習筆記
重定向 302 與localhost 學1、新建工程: import java.io.IOException; import java.io.PrintWriter; import javax.servlet.ServletException; import javax.servlet.http.HttpS
FPGA-UART協議與實現學習筆記
比特 系統 多少 rs232 計算 計數 時鐘 部分 寄存器 上一段時間學習了一下FPGA,現在寫一些學習心得,以及自已在學習的過程之中遇到的一些問題。 首先介紹一下UART(Universal Asynchronous Receiver/Trans
opencv 視覺項目學習筆記(二): 基於 svm 和 knn 車牌識別
its ++ eas -a rect() repr poi obj std 車牌識別的屬於常見的 模式識別 ,其基本流程為下面三個步驟: 1) 分割: 檢測並檢測圖像中感興趣區域; 2)特征提取: 對字符圖像集中的每個部分進行提取; 3)分類: 判斷圖像快是不是車牌或者 每
集合Map,HashMap、TreeMap+JAVA學習筆記-DAY18
18.01_集合框架(Map集合概述和特點) A:Map介面概述 檢視API可以知道: 將鍵對映到值的物件 一個對映不能包含重複的鍵 每個鍵最多隻能對映到一個值 B:Map介
CG-曲線與曲面-學習筆記
一、連續性 1. 引數連續性 0階引數連續性(C0):是指曲線的幾何位置連線,即第一個曲線段的終點與第二個曲線段的起點x,y,z值相等; 1階引數連續性(C1):在C0的基礎上,該始末點的導數相等; 2階引數連續性(C2):在C1的基礎上,該始末點的二階導相等; 2. 幾何連續性(條件不太苛刻)
C#委託與事件學習筆記
委託事件學習筆記 本文是學習委託和事件的筆記,水平有限,如有錯漏之處,還望大神不吝賜教。 什麼是委託?從字面意思來解釋,就是把一個動作交給別人去執行。在實際開發中最常用的就是使一個方法可以當做一個引數傳遞,以便在方法中可以根據實際情況實現不同的功能。 什麼是事件?事件就是發生的事情,例如點選了一
採用大資料的商業動機與驅動 ------ 學習筆記
概念: 架構:架構是針對某種特定目標系統的具有體系性的、普遍性的問題而提供的通用的解決方案 業務架構是基於業務導向和驅動的架構來理解、分析、設計、構建、整合、擴充套件、執行和管理資訊系統,比如業務架構體系認為一個資訊系統必須由組織機構、業務流程、業務資訊、業務功能、和業務語義等層次構成。為實