
蟻群演算法理論
1.關於旅行商(TSP)問題及衍化
旅行商問題(Traveling Saleman Problem,TSP)是車輛路徑排程問題(VRP)的特例,由於數學家已證明TSP問題是NP難題,因此,VRP也屬於NP難題。旅行商問題(TSP)又譯為旅行推銷員問題、貨郎擔問題,簡稱為TSP問題,是最基本的路線問題,該問題是在尋求單一旅行者由起點出發,通過所有給定的需求點之後,最後再回到原點的最小路徑成本。——旅行商問題百科
很明顯,當節點數很少時,大多數人都會想到,問題很簡單,直接窮舉就OK了,但實際問題中,節點數往往很大,變得不可能。例如:對於一個僅有16個城市的旅行商問題,如果用窮舉法來求問題的最優解,需比較的可行解有:15!/2=653,837,184,000個
TSP問題解決演算法的發展可以分為3個部分:
1).經典精確演算法:窮舉法、線性規劃演算法、動態規劃演算法、分支定界演算法等運籌學中的傳統演算法,這些演算法複雜度一般都很大,只適用於求解小規模問題。
2).近似演算法:當問題規模較大時,其所需的時間成級數增長,這是我們無法接受的,演算法求解問題的規模受到了很大的限制,一個很自然的想法就是犧牲精確解法中的最優性,去尋找一個好的時間複雜度我們可以容忍的,同時解的質量我們可以接受的演算法.基於這一思想所設計出的演算法統稱為近似演算法。如插入演算法,最鄰近演算法等。
3).智慧演算法:隨著科學技術和生產的不斷髮展,許多實際問題不可能在合理的時間範圍內找到全域性最優解,這就促使了近代最優化問題求解方法的產生。隨著各種不同搜尋機制的啟發式演算法相繼出現,如禁忌搜尋、遺傳演算法、模擬退火演算法、人工神經網路、進化策略、進化程式設計、粒子群優化演算法、蟻群優化演算法和免疫計算等,掀起了研究啟發式演算法的高潮。
具體每一種演算法不再詳細描述,大家可以針對性的尋找相應資料進行了解。
TSP問題在實際的生產生活中,更加實際環境不同,有很多衍生的經典問題。車輛路徑排程(VRP)擴充套件問題是經典VRP加入各種約束條件後而形成的。例如需求約束形成的需求隨機的車輛路徑問題(SVRP);加入時間約束得到的帶時間窗的車輛路徑題(VRPTW);加入距離約束的距離約束車輛路徑問題(DVRP);根據其它條件的不同,還有多配送中心車輛路徑問題(MDVRP)、可切分的車輛路徑問題(SDVRP);先配送再收集車輛路徑問題(VRPB)、配送收集車輛路徑問題(VRPPD);資訊不完全的模糊車輛路徑問題(FVRP)[3]。
2.群蟻演算法基本原理
2.1 演算法綜述
對於VRP問題,求解演算法大致可分為精確演算法和人工智慧演算法兩大類。精確性演算法基於嚴格的數學手段,在可以求解的情況下,解的質量較好。但是由於演算法嚴格,運算量大,特別是大規模的問題幾乎無法求解。所以其應用只能是小規模的確定性問題,面對中小規模問題,人工智慧演算法在精度上不佔優勢。但規模變大時,人工智慧方法基本能在可接受時間裡,找到可接受的滿意解,這是精確演算法難以做到的。由於的實際問題,各種約束錯綜複雜,人工智慧演算法顯示出了巨大的優越性,也正因為如此,實際應用中,人工智慧演算法要更廣泛。求解車輛路徑排程問題的精確演算法有動態規劃法、分枝定界法等。並開始尋求所得結果可接受的啟發式演算法,以處理大規模實際問題,一些其他學科的新一代優化演算法相繼出現,如禁忌搜尋演算法,遺傳演算法,人工神經網路演算法,以及現在研究較多的蟻群演算法等。
2.2 群蟻演算法的原理
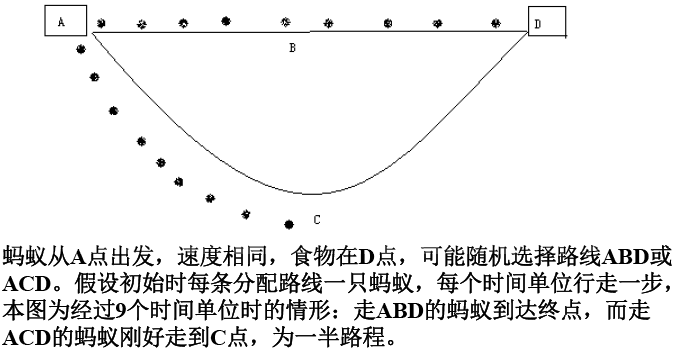
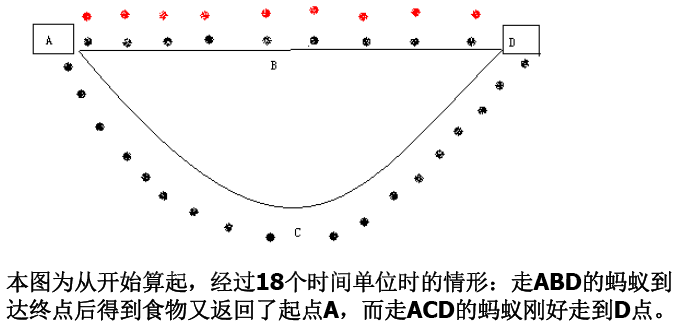
蟻群演算法是受到對真實螞蟻群覓食行為研究的啟發而提出。生物學研究表明:一群相互協作的螞蟻能夠找到食物和巢穴之間的最短路徑,而單隻螞蟻則不能。生物學家經過大量細緻觀察研究發現,螞蟻個體之間的行為是相互作用相互影響的。螞蟻在運動過程中,能夠在它所經過的路徑上留下一種稱之為資訊素的物質,而此物質恰恰是螞蟻個體之間資訊傳遞交流的載體。螞蟻在運動時能夠感知這種物質,並且習慣於追蹤此物質爬行,當然爬行過程中還會釋放資訊素。一條路上的資訊素蹤跡越濃,其它螞蟻將以越高的概率跟隨爬行此路徑,從而該路徑上的資訊素蹤跡會被加強,因此,由大量螞蟻組成的蟻群的集體行為便表現出一種資訊正反饋現象。某一路徑上走過的螞蟻越多,則後來者選擇該路徑的可能性就越大。螞蟻個體之間就是通過這種間接的通訊機制實現協同搜尋最短路徑的目標的。我們舉例簡單說明螞蟻覓食行為:

如上圖a,b,c的示意圖:
a圖是原始狀態,螞蟻起始點為A,要到達E,中途有障礙物,要繞過才能到達。BC和BH是繞過障礙物的2條路徑(假設只有2條)。各個路徑的距離d已經標定。
b圖是t=0時刻螞蟻狀態,各個邊上有相等的資訊素濃度,假設為15;
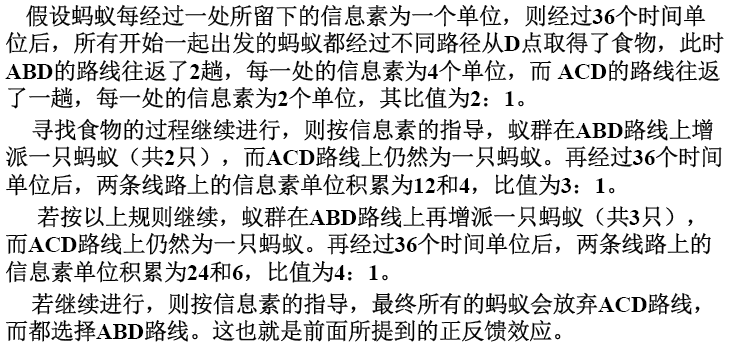
c圖是t=1時刻螞蟻經過後的狀態,各個邊的資訊素濃度,有變化;因為大量螞蟻的選擇概率會不一樣,而選擇概率是和路徑長度相關的。所以越短路徑的濃度會越來越大,經過此短路徑達到目的地的螞蟻也會比其他路徑多。這樣大量的螞蟻實踐之後就找到了最短路徑。所以這個過程本質可以概括為以下幾點:
1.路徑概率選擇機制資訊素蹤跡越濃的路徑,被選中的概率越大
2.資訊素更新機制路徑越短,路徑上的資訊素蹤跡增長得越快
3.協同工作機制螞蟻個體通過資訊素進行資訊交流。
從螞蟻覓食的原理可見,單個個體的行為非常簡單螞蟻只知道跟蹤資訊素爬行並釋放資訊素,但組合後的群體智慧又非常高螞蟻群能在複雜的地理分佈的清況下,輕鬆找到蟻穴與食物源之間的最短路徑。這種特點恰恰與元啟發演算法的特點相一致,蟻群優化演算法正是受到這種生態學現象的啟發後加以模仿並改進而來,覓食的螞蟻由人工蟻替代,螞蟻釋放的資訊素變成了人工資訊素,螞蟻爬行和資訊素的蒸發不再是連續不斷的,而是在離散的時空中進行。
上述例子如果不好理解,我在這裡貼幾張PPT,個人感覺非常不錯,也是我找了很多資料覺得最好理解的【來源是大連理工大學谷俊峰】,點選這裡提供下載:蟻群演算法基本知識.rar。
從深層意義上來講,蟻群演算法作為優化的方法之一,屬於人工群集智慧領域。人工群集智慧,大都受自然群集智慧如昆蟲群和動物群等的啟發而來。除了具有獨特的強有力的合作搜尋能力外,還可以利用一系列的計算代理對問題進行分散式處理,從而大大提高搜尋效率。
回到目錄3.群蟻演算法的基本流程
我們還是採用大連理工大學谷俊峰的PPT來說明問題,重要公式進行截圖計算和解釋,對PPT難以理解的地方進行單獨解釋:
3.1 基本數學模型
首先看看基本TSP問題的基本數學模型:
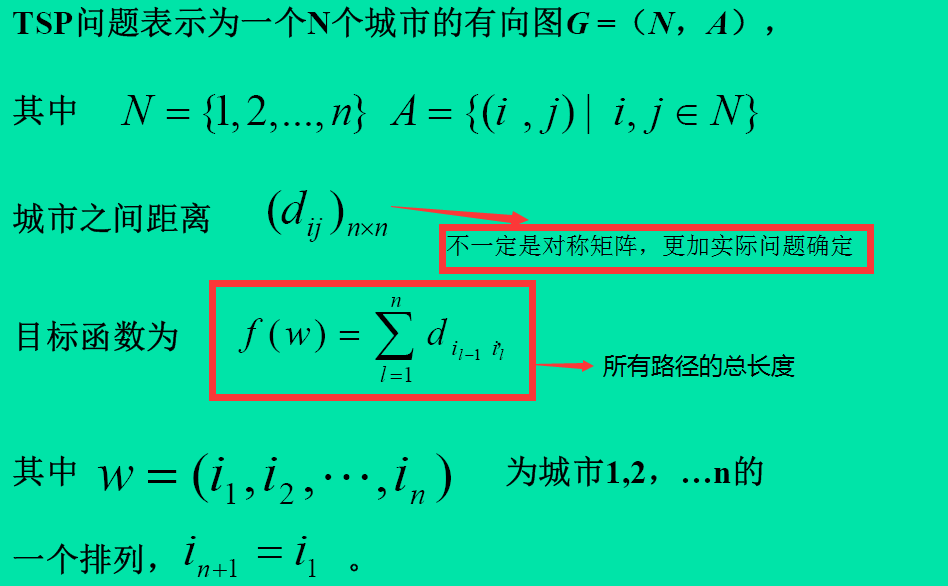
問題其實很簡單,目標函式就是各個走過路徑的總長度,注意的就是距離矩陣根據實際的問題不一樣,長度是不一樣的。
3.2 群蟻演算法說明
在說明群蟻演算法流程之前,我們對演算法原理和幾個注意點進行描述:
1.TSP問題的人工蟻群演算法中,假設m只螞蟻在圖的相鄰節點間移動,從而協作非同步地得到問題的解。每隻螞蟻的一步轉移概率由圖中的每條邊上的兩類引數決定:1. 資訊素值也稱資訊素痕跡。2.可見度,即先驗值。
2.資訊素的更新方式有2種,一是揮發,也就是所有路徑上的資訊素以一定的比率進行減少,模擬自然蟻群的資訊素隨時間揮發的過程;二是增強,給評價值“好”(有螞蟻走過)的邊增加資訊素。
3.螞蟻向下一個目標的運動是通過一個隨機原則來實現的,也就是運用當前所在節點儲存的資訊,計算出下一步可達節點的概率,並按此概率實現一步移動,逐此往復,越來越接近最優解。
4.螞蟻在尋找過程中,或者找到一個解後,會評估該解或解的一部分的優化程度,並把評價資訊儲存在相關連線的資訊素中。
3.3 群蟻演算法核心步驟
更加我們前面的原理和上述說明,群蟻演算法的2個核心步驟是 路徑構建 和 資訊素更新。我們將重點對這2個步驟進行說明。
3.3.1 路徑構建
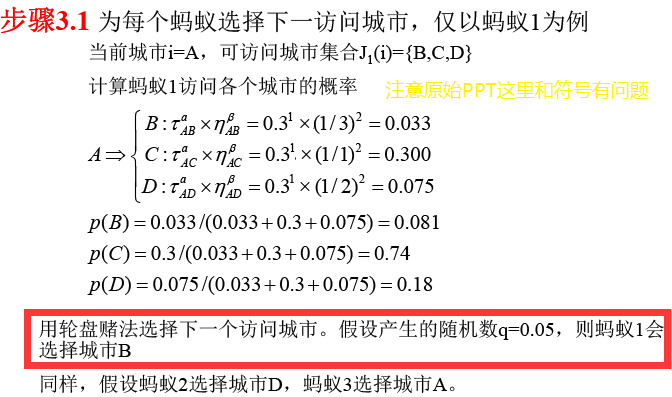
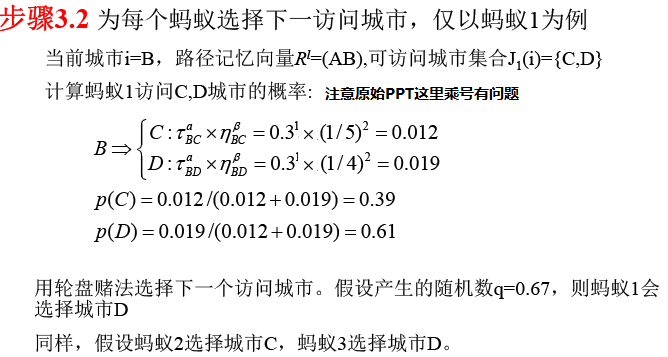
每個螞蟻都隨機選擇一個城市作為其出發城市,並維護一個路徑記憶向量,用來存放該螞蟻依次經過的城市。螞蟻在構建路徑的每一步中,按照一個隨機比例規則選 擇下一個要到達的城市。隨機概率是按照下列公式來進行計算的:
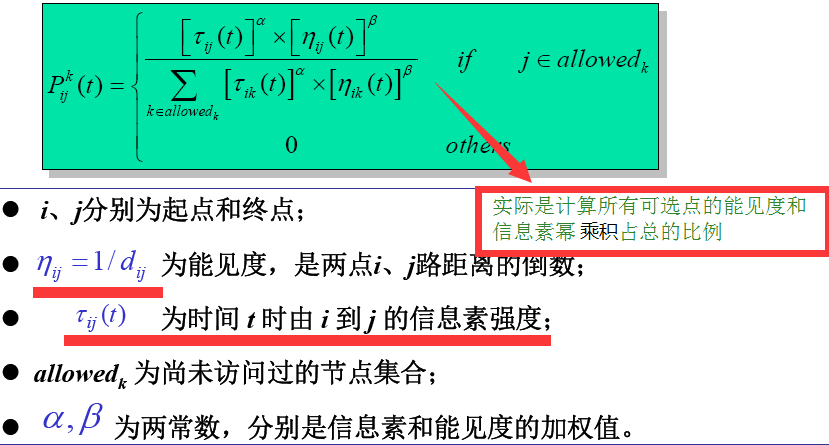
上述公式就是計算 當前點 到 每一個可能的下一個節點 的概率。分子是 資訊素強度 和 能見度 的冪乘積,而分母則是所有 分子的和值。這個剛開始是很不容易理解的,我們在最後例項計算的時候,可以看得很清楚,再反過來理解公式。注意每次選擇好節點後,就要從可用節點中移除選擇的節點。
3.3.2 資訊素更新
資訊素更新是群蟻演算法的核心。也是整個演算法的核心所在。演算法在初始期間有一個固定的濃度值,在每一次迭代完成之後,所有出去的螞蟻回來後,會對所走過的路線進行計算,然後更新相應的邊的資訊素濃度。很明顯,這個數值肯定是和螞蟻所走的長度有關係的,經過一次次的迭代, 近距離的線路的濃度會很高,從而得到近似最優解。那我們看看資訊素更新的過程。
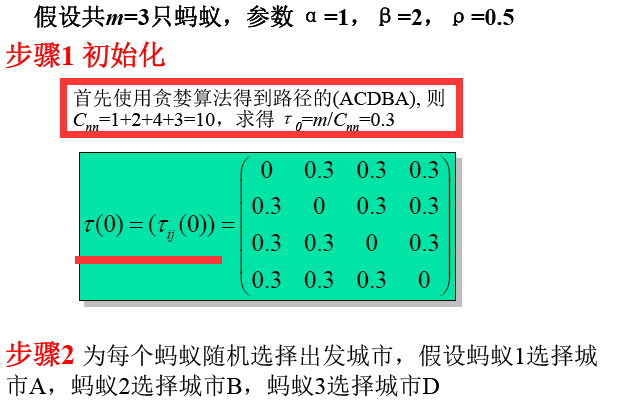
初始化資訊素濃度C(0),如果太小,演算法容易早熟,螞蟻會很快集中到一條區域性最優路徑上來,因為可以想想,太小C值,使得和每次揮發和增強的值都差不多,那麼 隨機情況下,一些小概率的事件發生就會增加非最優路徑的資訊素濃度;如果C太大,資訊素對搜尋方向的指導性作用減低,影響演算法效能。一般情況下,我們可以使用貪婪演算法獲取一個路徑值Cnn,然後根據螞蟻個數來計算C(0) = m/Cnn ,m為螞蟻個數
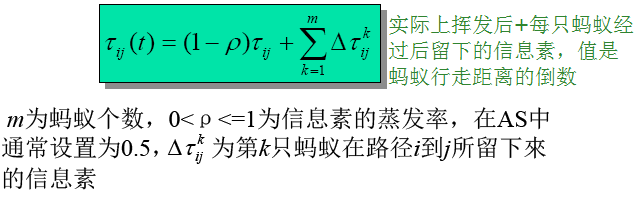
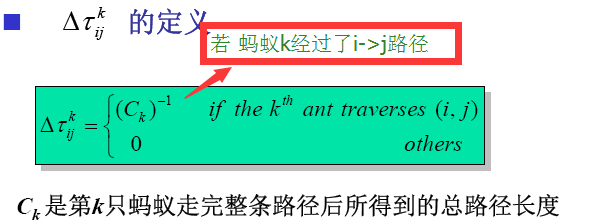
每一輪過後,問題空間中的所有路徑上的資訊素都會發生蒸發,然後,所有的螞蟻根據自己構建的路徑長度在它們本輪經過的邊上釋放資訊素,公式如下:
資訊素更新的作用:
1.資訊素揮發(evaporation)資訊素痕跡的揮發過程是每個連線上的 資訊素痕跡的濃度自動逐漸減弱的過程,這個揮發過程主要用於避 免演算法過快地向區域性最優區域集中,有助於搜尋區域的擴充套件。
2.資訊素增強(reinforcement)增強過程是蟻群優化演算法中可選的部 分,稱為離線更新方式(還有線上更新方式)。這種方式可以實現 由單個螞蟻無法實現的集中行動。基本蟻群演算法的離線更新方式是 在蟻群中的m只螞蟻全部完成n城市的訪問後,統一對殘留資訊進行 更新處理。
3.3.3 迭代與停止
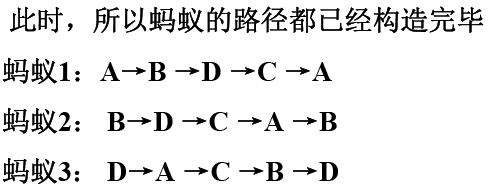
迭代停止的條件可以選擇合適的迭代次數後停止,輸出最優路徑,也可以看是否滿足指定最優條件,找到滿足的解後停止。最重要的是,我剛開始理解這個演算法的時候,以為每一隻螞蟻走一條邊就是一次迭代,其實是錯的。這裡演算法每一次迭代的意義是:每次迭代的m只螞蟻都完成了自己的路徑過程,回到原點後的整個過程。
回到目錄4.群蟻演算法計算例項
使用PPT中的一個案例,非常直觀,對幾個符號錯誤進行了修改,主要是計算概率的乘號,結果沒有錯誤:
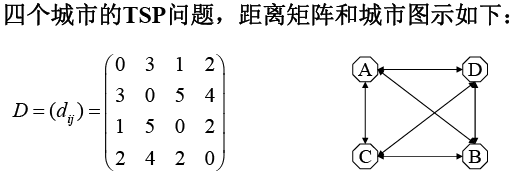

過程總體還是比較簡單的,注意理解公式,然後把公式和例項結合起來看,最好是拿筆自己手動畫一畫,容易理解。
相關推薦
蟻群演算法理論
1.關於旅行商(TSP)問題及衍化 旅行商問題(Traveling Saleman Problem,TSP)是車輛路徑排程問題(VRP)的特例,由於數學家已證明TSP問題是NP難題,因此,VRP也屬於NP難題。旅行商問題(TSP)又譯為旅行推銷員問題、貨郎擔問題,
蟻群演算法學習
** 蟻群演算法的基本原理(簡單概括): ** 剛開始螞蟻按照同等概率選擇各條路徑。 螞蟻在經過的路徑下留下資訊素。 短的路徑螞蟻會率先找到食物源,因此資訊素濃度偏大。 由於資訊素的揮發,較長路徑上的資訊素逐漸消失 特點:正反饋;不容易陷入區域
C++:蟻群演算法解決TSP(C++多執行緒版)
TSP問題:旅行商問題,最短迴路。 這裡採用att48資料,鄰接矩陣全部取整數,原資料放在文後。 解決程式碼如下: //#define TEST_INPUT //#define TEST_T //#define TEST_ANT //#define TEST_VALUE #
【機器學習筆記35】蟻群演算法
【參考資料】 【1】《蟻群演算法原理及其應用》 【2】測試資料: https://comopt.ifi.uni-heidelberg.de/software/TSPLIB95/tsp/att48.tsp.gz 演算法原理(以TSP問題為例) (1)引數初始化。令時間t=0和迴圈次數
蟻群演算法matlab
(一)蟻群演算法的由來 蟻群演算法最早是由Marco Dorigo等人在1991年提出,他們在研究新型演算法的過程中,發現蟻群在尋找食物時,通過分泌一種稱為資訊素的生物激素交流覓食資訊從而能快速的找到目標,據此提出了基於資訊正反饋原理的蟻群演算法。 蟻群演算法的基本思想來源於自然界螞
簡單易懂,蟻群演算法解決旅行商問題
轉載宣告: 原文把蟻群解決旅行商問題寫的很清楚,只不過本人認為原文中有一些小錯誤,特此更改(文中紅色加粗字型為改正處),程式碼中出現的一些演算法的小問題也進行了更正(比如程式碼中的貪心演算法),程式碼也附在下面,謝謝博主的分享。 1.關於旅行商(TSP)問題及衍化
智慧演算法---蟻群演算法
1 蟻群演算法及其基本思想 蟻群演算法是一種智慧優化演算法,通過蟻群優化求解複雜問題,ACO在離散優化問題方面有比較好的優越性。 基本思想(以旅行商問題為例) &nbs
基於基本蟻群演算法解決連續優化問題
基於基本蟻群演算法解決連續優化問題 相關連結 TSP_旅行商問題-基本蟻群演算法 基本蟻群演算法解決連續優化問題基本流程 用一個螞蟻代表一個可行解,一個螞蟻含有的資訊包括各變數值; 1、確定迭代週期; 2、確定螞蟻數;
TSP_旅行商問題-基本蟻群演算法
TSP_旅行商問題-基本蟻群演算法 旅行商系列演算法 TSP_旅行商問題-貪心演算法 TSP_旅行商問題-模擬退火演算法 TSP_旅行商問題-遺傳演算法 TSP_旅行商問題-基本蟻群演算法 基於基本蟻群演算法解決連續優化
何為啟發式演算法——退火演算法,蟻群演算法,遺傳演算法
一、退火演算法 模擬退火演算法來源於固體退火原理,將固體加溫至充分高,再讓其徐徐冷卻,加溫時,固體內部粒子隨溫升變為無序狀,內能增大,而徐徐冷卻時粒子漸趨有序,在每個溫度都達到平衡態,最後在常溫時達到基態,內能減為最小。 模擬退火演算法新解的產生和接受
記一次蟻群演算法解決TSP問題
演算法規則 1)範圍 螞蟻觀察到的範圍是一個方格世界,螞蟻有一個引數為速度半徑(一般是3),那麼它能觀察到的範圍就是3*3個方格世界,並且能移動的距離也在這個範圍之內。 2)摺疊環境 螞蟻所在的環境是一個虛擬的世界,其中有障礙物,有別的螞蟻,還有資訊素,資訊素有兩種,一種是找到食物的
2018-4-8蟻群演算法---包子陽《智慧優化演算法以及Matlab實現》第五章
資料來源:《智慧優化演算法以及matlab實現》包子陽 餘繼周 編著第五章-----蟻群演算法是一種元啟發式優化演算法(自己理解:就是作為群體的單位個體也就是元,在裡面充當著隨機的選擇搜尋的方向,有助於全域性勘探)啟發:自然界的螞蟻有能力在沒有然和提示的情況下找到從巢穴矩離
蟻群演算法原理詳解和matlab程式碼
1原理: 螞蟻在尋找食物源的時候,能在其走過的路徑上釋放一種叫資訊素的激素,使一定範圍內的其他螞蟻能夠察覺到。當一些路徑上通過的螞蟻越來越多時,資訊素也就越來越多,螞蟻們選擇這條路徑的概率也就越高,結果導致這條路徑上的資訊素又增多,螞蟻走這條路的概率又增加,生生
旅行商問題TSP(蟻群演算法Java)
旅行商問題,即TSP問題(Traveling Salesman Problem)是數學領域中著名問題之一。假設有一個旅行商人要拜訪N個城市,他必須選擇所要走的路徑,路徑的限制是每個城市只能拜訪一次,而且最後要 回到原來出發的城市。路徑的選擇目標是要求得的路徑路程為所有路徑之中
蟻群演算法解決tsp問題
控制蟻群演算法走向的關鍵是資訊素,資訊素類似遺傳演算法的適應性函式,類似退火演算法的評價函式,影響著其中一隻螞蟻的下一步的選擇。 螞蟻:類似遺傳演算法的染色體,就是一條解,在tsp問題中螞蟻的路徑就是tsp的解。 資訊素:評價函式,與路徑成反比 螞蟻數量:一次迭代有多少隻螞
有限級資訊素蟻群演算法
有限級資訊素蟻群演算法使用路徑等級作為資訊素更新的依據,相比於傳統的蟻群演算法,捨棄了目標函式作為資訊素更新的依據這一方法。在TSP問題中,目標函式實際就是路徑長度,在傳統的蟻群演算法中資訊素更新量為Q/f(x),其中Q為某一常數,而f(x)就是目標函式值,即路徑長度。而在有限級資訊素蟻群演算法中在
【機器學習】利用蟻群演算法求解旅行商(TSP)問題
如果喜歡這裡的內容,你能夠給我最大的幫助就是轉發,告訴你的朋友,鼓勵他們一起來學習。 If you like the content here, you can give me the greatest help is forwarding, tell you
蟻群演算法調參記錄
蟻群演算法主要有5個引數a資訊素重要程度,b啟發式因子重要程度,c資訊素蒸發係數,ant螞蟻數量,iter迭代次數製作了一個50個節點的地圖,用交叉對比的方法尋找最佳引數首先調b螞蟻數100,迭代數100.很明顯b越小距離和平均值越大,標準差也越大,b=14的時候距離的平均值
蟻群演算法解TSP問題
添加了部分註釋,幾乎沒有改動(引數和城市格式略做改動),原博主的程式碼寫的很容易理解,也是我找到的最短的程式碼了,在此感謝。 程式碼如下: //蟻群演算法關於簡單的TSP問題求解// #include<stdio.h> #include<std
蟻群演算法程式碼實現
旅行商問題大都是用遺傳演算法求解,不過蟻群演算法比它高效得多,在百度的蟻群演算法吧裡有人發了個註釋清晰的程式碼,有興趣的可以去研究一下蟻群演算法和模擬退火演算法,這兩者都可以解決旅行商問題。而關於遺傳演算法和模擬退火演算法,部落格園裡的某位牛人很清楚地介紹了,發個連結吧