
Kinect學習之KinectV2驅動在ubuntu14.04+ros上的安裝
實驗室買回了兩臺Kinect第二代,到手便在ubuntu上安裝驅動,然而,,,,,由於各種對硬體的不熟悉,折騰了好久才把驅動裝了起來,總結一下,留著日後參考,也希望別的初學者少走彎路。
一、系統環境:sys:ubuntu14.04 LTS ros:indigo 顯示卡:AMD Radeon R7 3xx系列
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2 2、下載升級deb檔案
cd depends
./download_debs_trusty.sh3、下載工具:
sudo apt-get install build-essential cmake pkg-config安裝libusb:(必須要安裝,否則往下會出錯)
sudo apt-add-repository ppa:floe/libusb
sudo apt-get update
sudo apt-get install libusb-1.0-0-dev4、安裝TurboJPEG
sudo apt-get install libturbojpeg libjpeg-turbo8-dev5、安裝OpenGL:
sudo dpkg -i debs/libglfw3*deb; sudo apt-get 6、安裝OpenCL(推薦安裝,因為iai_kinect2預設用的opencl做registration,速度穩穩30Hz,CPU的話我試的是2-3Hz)
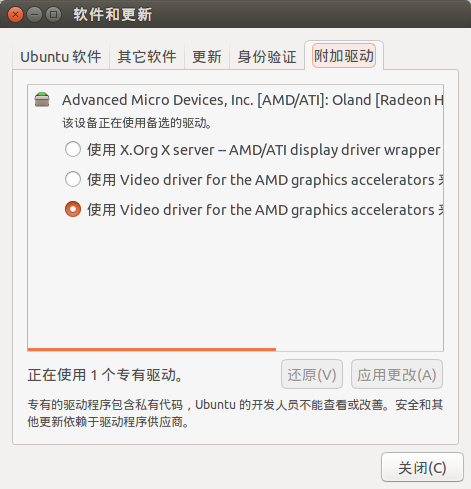
首先要安裝好顯示卡驅動,最簡單的 顯示卡安裝方法是去系統設定->軟體與更新->附加驅動選擇最新的驅動(通常可選,選最新的版本,如果後面執行出錯,就再選擇其它的版本試試),
接著安裝Opencl:
sudo apt-get install nvidia-modprobe 7、安裝openni2(可選)
sudo apt-add-repository ppa:deb-rob/ros-trusty && sudo apt-get update
apt-get install libopenni2-dev
sudo apt-get install openni2-utils && sudo make install-openni2 && NiViewer28、編譯libfreenect2
cd ..
mkdir build && cd build
cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2
make
sudo make install注:cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2指編譯到home/freenect2目錄下
9、獲得裝置udev許可權
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/10、指定安裝路徑給第三方應用
在build資料夾下:
cmake ..-Dfreenect2_DIR=$HOME/freenect2/lib/cmake/freenect211、測試驅動是否安裝好
sudo chmod +x ./bin/Protonect
./bin/Protonect cpu
./bin/Protonect gl
./bin/Protonect cl、
測試Openni2:
執行:
Niviewer2分別測試用cpu opencl opengl進行影象處理,如果都成功採集並顯示出影象,則驅動安裝好了。
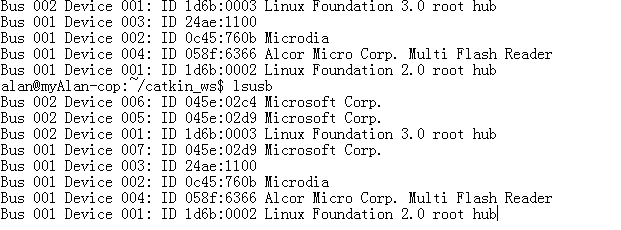
注意:執行之前一定要確保kinect連線上了USB3.0,可以輸入lsusb,如果顯示如下,則電腦連線上了kinect:
三、Ros介面安裝(iai_kinect2安裝)
1、ROS下iai_kinect2安裝
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"注:如果rosdep install出現如下問題:
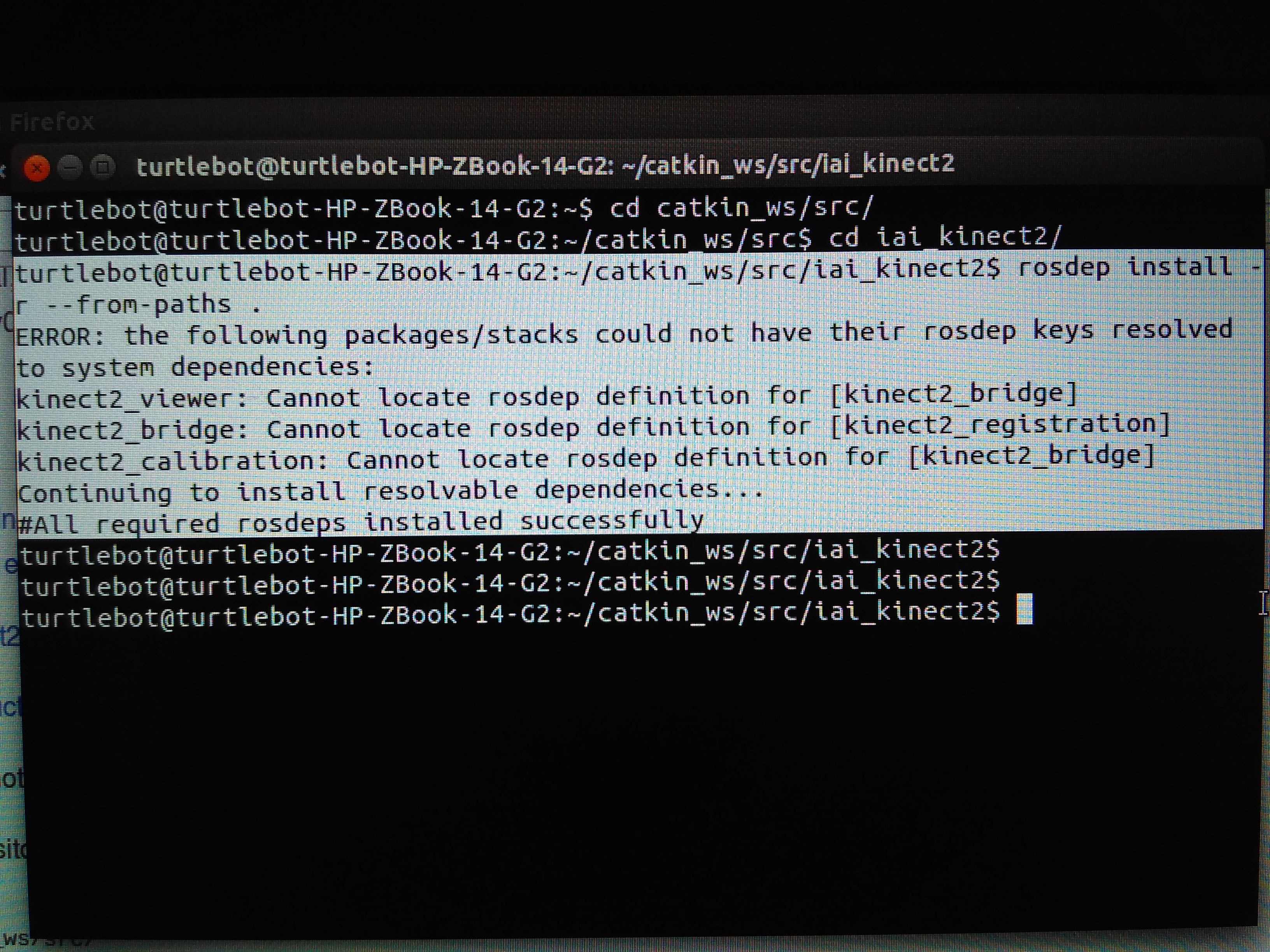
這裡作者說可以忽略,如果彈出要rosdep update,則選擇網速較好的時候更新一下。
2、安裝結束,把你的kinect for xbox one 連上usb3.0 測試一下
roslaunch kinect2_bridge kinect2_bridge.launch你也可以選擇深度圖獲取方式和registration方式:
rosrun kinect2_bridge kinect2_bridge _depth_method:=<opengl|opencl|cpu> _reg_method:=<cpu|opencl>_depth_method選opencl(預設)或者opengl或者cpu,_reg_method可以選opencl(預設)或者cpu
注:這裡預設是用opencl做registration,如果報錯,這是opencl沒有安裝好。我開始的報錯是初始化失敗,顯示一大堆的Packet buffer is Null,如圖:
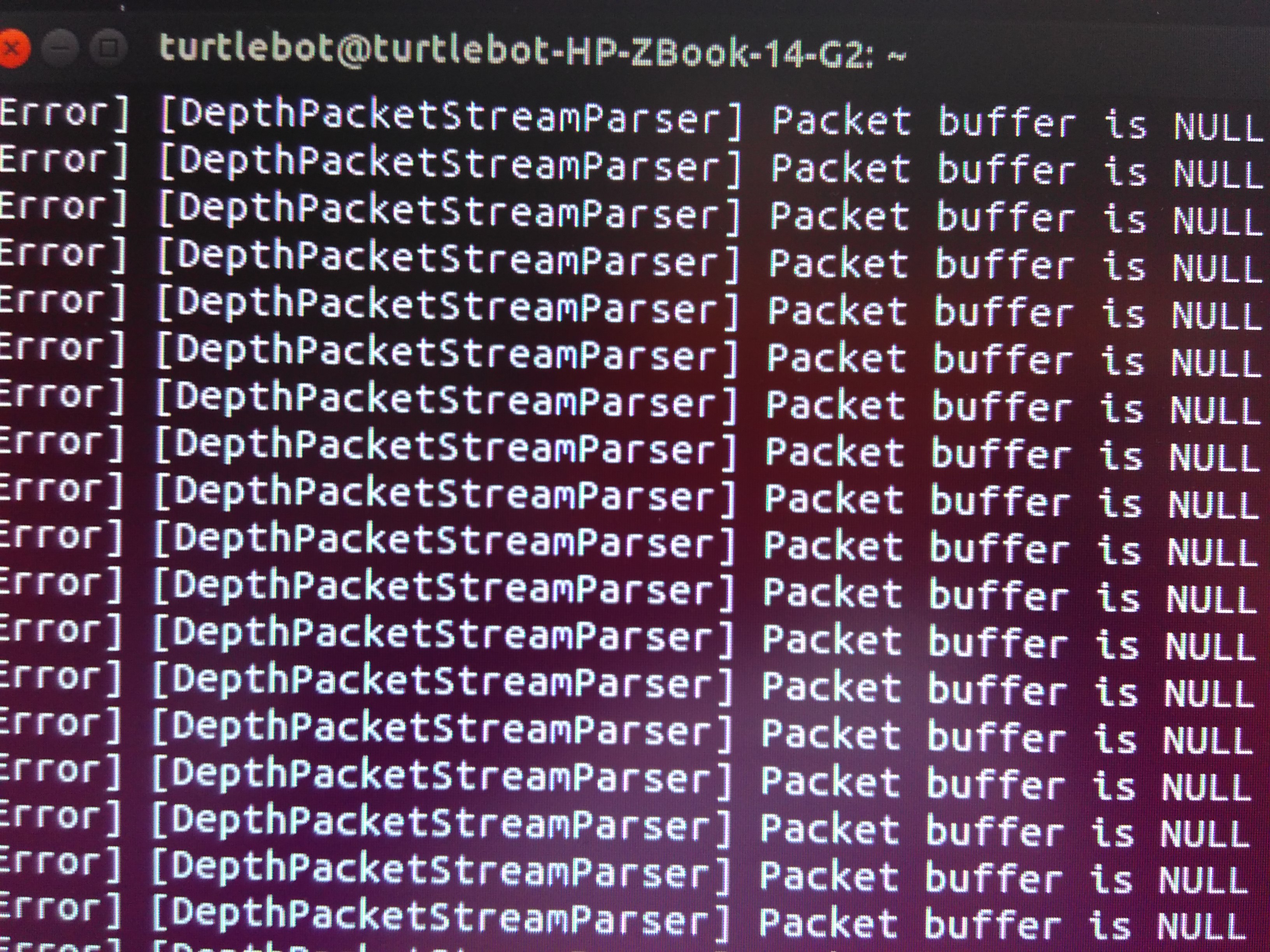
解決辦法:重新安裝顯示卡驅動,之後再按以上步驟安裝opencl即可
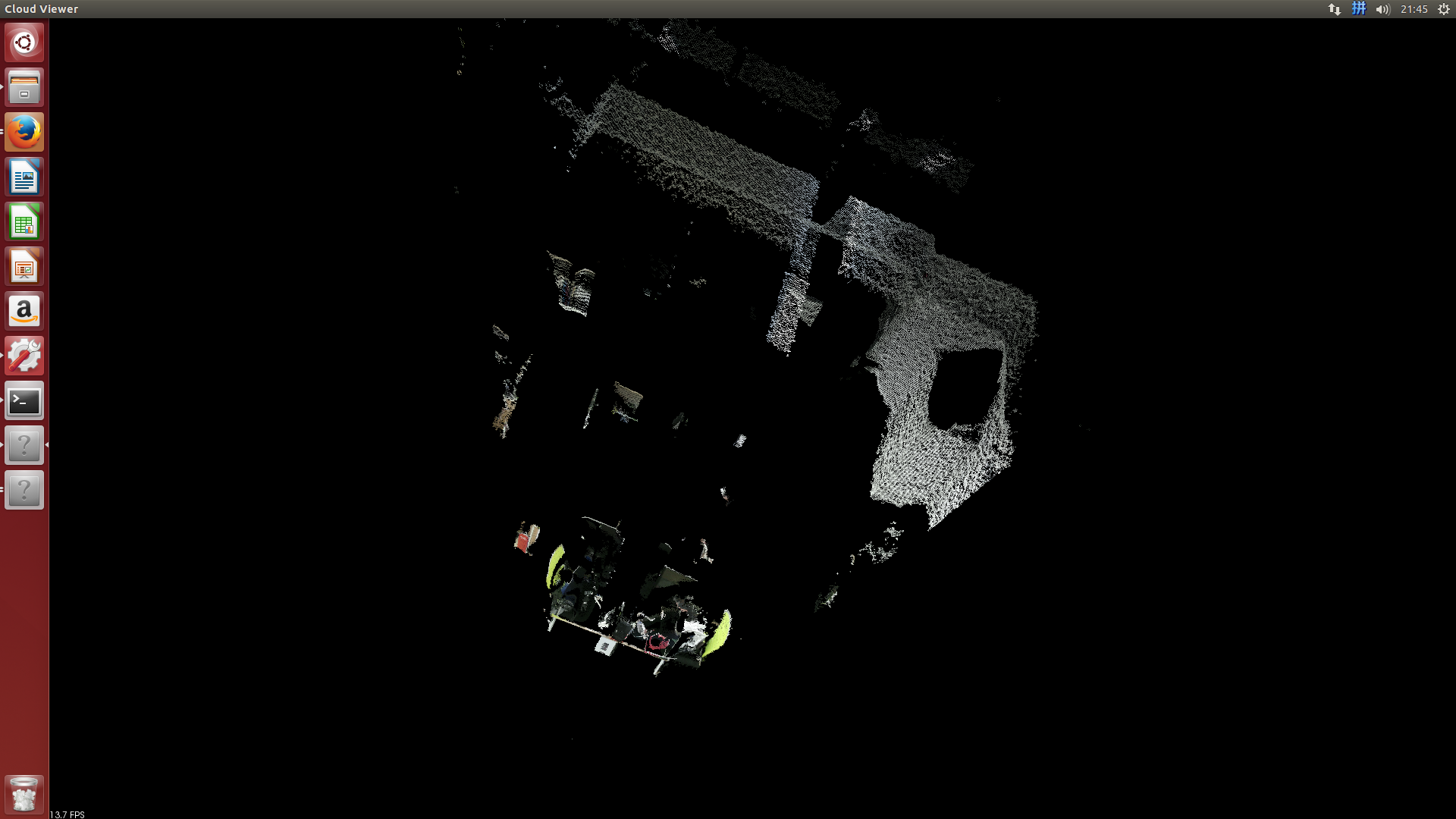
3、再開一個終端,檢視點雲或者影象
rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud
rosrun kinect2_viewer kinect2_viewer kinect2 sd image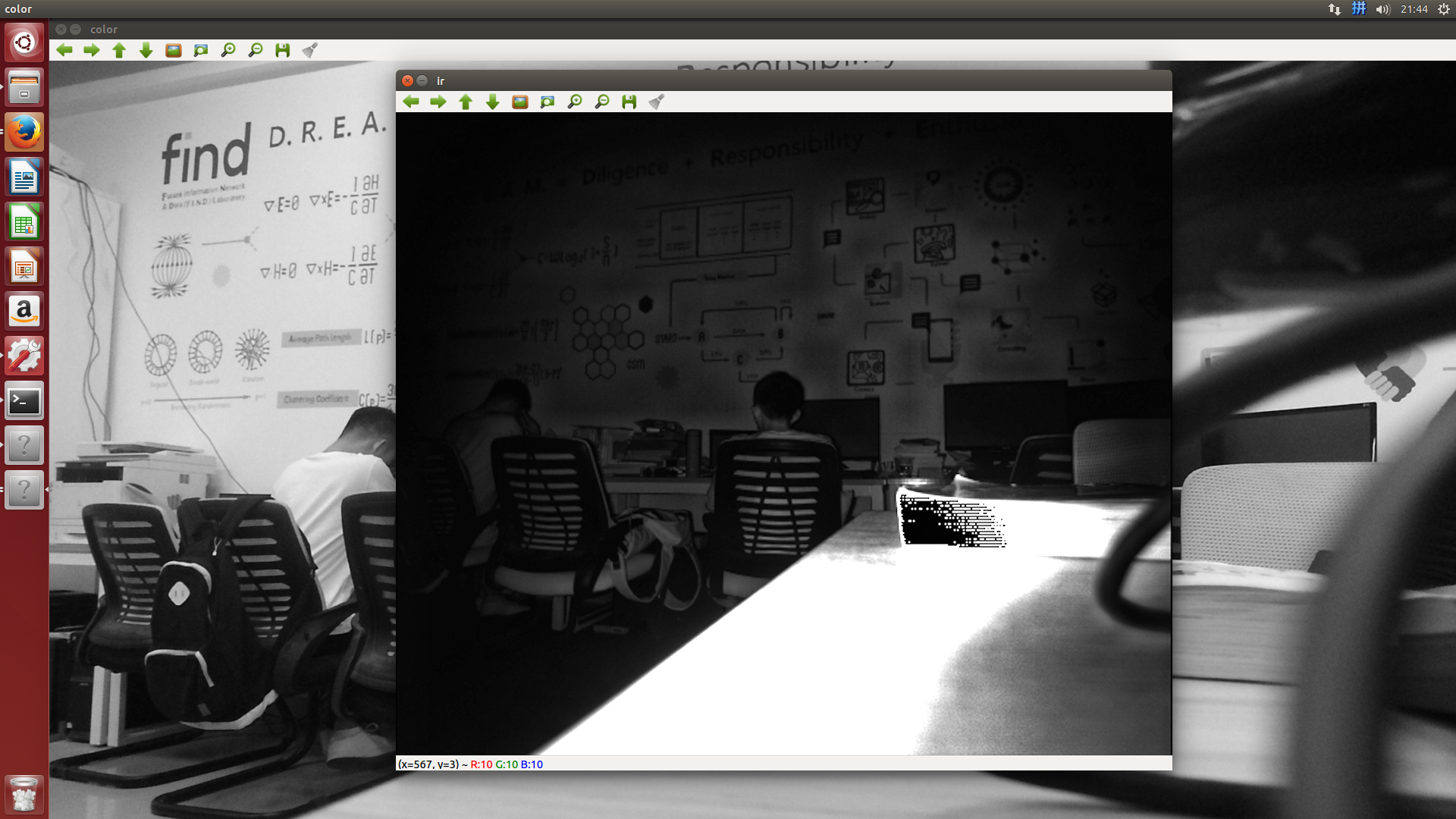
四、失敗教訓
我的問題是顯示卡驅動安裝不成功,最簡單的方法是在軟體和更新處選擇附加驅動然後暗戰,然而我的AMD獨顯在那裡安裝顯示卡驅動失敗了,導致在執行roslaunch kinect2_bridge kinect2_bridge.launch時總是初始化失敗,折騰了很久依然沒辦法在軟體更新處成功安裝AMD顯示卡驅動,最後沒辦法,只有在AMD官網下載驅動並安裝,一下是我安裝顯示卡驅動的教程:
在AMD官網上下載4個deb包(一定要對照自己顯示卡的型號來下載),分別是:
fglrx-core_14.501-0ubuntu1_amd64_UB_14.01.deb
fglrx_14.501-0ubuntu1_amd64_UB_14.01.deb
fglrx-amdcccle_14.501-0ubuntu1_amd64_UB_14.01.deb
fglrx-dev_14.501-0ubuntu1_amd64_UB_14.01.deb
接著正式安裝:
1、先解除安裝先前版本(重要):
sudo sh /usr/share/ati/fglrx-uninstall.sh
sudo apt-get remove --purge fglrx fglrx_* fglrx-amdcccle* fglrx-dev*解除安裝完之後重啟系統:sudo reboot
2、先安裝core:
sudo dpkg -i fglrx-core_14.501-0ubuntu1_amd64_UB_14.01.deb注意:可能會提示缺少依賴,此時可以輸入apt-get -f install來自動安裝依賴 ,接著再安裝core
3、再安裝
sudo dpkg -i fglrx_14.501-0ubuntu1_amd64_UB_14.01.deb4、安裝ccc
sudo dpkg -i fglrx-amdcccle_14.501-0ubuntu1_amd64_UB_14.01.deb5、最後安裝dev
sudo dpkg -i fglrx-dev_14.501-0ubuntu1_amd64_UB_14.01.deb以上均成功安裝之後,則可以測試一下驅動是否已經成功安裝:
輸入fglrxinfo,如果安裝成功則會顯示顯示卡型號,輸入fgl_glxgears則會跳出一個旋轉方塊(測試幀率)
至此,AMD顯示卡的官方驅動順利安裝成功,以上不能用opencl而導致的初始化失敗問題就可以解決了。
相關推薦
Kinect學習之KinectV2驅動在ubuntu14.04+ros上的安裝
實驗室買回了兩臺Kinect第二代,到手便在ubuntu上安裝驅動,然而,,,,,由於各種對硬體的不熟悉,折騰了好久才把驅動裝了起來,總結一下,留著日後參考,也希望別的初學者少走彎路。 一、系統環境:sys:ubuntu14.04 LTS ros:
ubuntu14.04+ROS(indigo) 安裝配置+虛擬機器VMware一站式配置教程(一)
Ubuntu14.04+ros(indigo)虛擬機器教程 1、安裝前置: 虛擬機器:VMware,具體版本最好是14,只要在360軟體管家中搜索安裝就好了。 安裝好了,在網上搜索一個序列。號就好 vmware12 5A02H-AU243
Ubuntu14.04+ROS+OpenCV+KinectV2
KinectV2+Ubuntu 14.04+Ros 安裝教程 - hitcm - 部落格園 視覺SLAM實戰(二):ORB-SLAM2 with Kinect2 - 半閒居士 - 部落格園 剛跟著高博的書學到點雲,本想跟著課後練習,學習一下在ROS系統中Kinect2的標定的,誰知安裝配置ROS
Ubuntu16.04 ros下安裝kinect驅動
環境: 獨顯gtx1050ti 已安裝Nvidia-390顯示卡驅動 OS: Ubuntu 16.04.5 LTS x64 ROS Distro: Kinetic Machine: HP-OMEN 暗影精靈4 之前由於按照教程安裝了SensorKinect驅動出
spark學習(1)--ubuntu14.04集群搭建、配置(jdk)
RM int 5.0 java_home 輸入 str cas Go 比較 環境:ubuntu14.04 1、文本模式桌面模式切換 ctrl+alt+F6 切換到文本模式 ctrl + alt +F7 /輸入命令startx切換到桌面模式 2、更改Ip地址、主機名 /
fpga學習之vga驅動
一、什麼是vga? vga:(Video Graphics Array,視訊圖形陣列),是 IBM 於 1987 年提出的一個使用類比訊號的電腦顯示標準。VGA 是最多製造商所共同支援的一個低標準,個人電腦在載入自己的獨特驅動程式之前,都必須支援 VGA 的標準。 二、vga掃描方式 顯示器
樹莓派2安裝ubuntu14.04+ros indigo
樹莓派2安裝ubuntu14.04+ros indigo 安裝ubuntu14.04 所需軟體:1.SDFormatter軟體(個人沒用) 2.Win32DiskImager(用來
KinectV2+Ubuntu 14.04+Ros 安裝教程
前言 最近經常有朋友問到Kinect V2在Ubuntu下的開發問題,首先需要弄清楚的是你的裝置是V1還是V2,這兩個的驅動是不能通用的。 如下是V2(左)和V1(右)。看看自己的裝置,然後再決定用哪個安裝方案。 本文針對的是V2的情況。 安裝 1、首先git
雙系統安裝之windows7引導ubuntu14.04啟動
網上關於如何安裝雙系統的教程有很多,而且基本沒有太大的問題,我寫這篇博文主要是針對我自己在安裝過程中遇到的問題做一個總結。 win7下安裝ubuntu 這篇教程寫的很詳細,在此我只說明以下幾個問題。 windows下磁碟分割槽 一塊硬碟預設只能有四個主分
ORB_SLAM2+kinect2.0+Ubuntu14.04+ROS Indigo總結
一:kinect2.0在Ubuntu14.04和ROS Indigo下執行 錯誤總結: 1.執行./bin/Protonect出現下面的錯誤,表示版本號不合適: [Info] [Freenect2Impl] enumerating devices... [Info] [F
ubuntu14.04 64位安裝WPS(成功解決沒有ia32-libs的問題)
col lun 又一 target rest .com update sudo lan 前幾天,就把自己的系統換成了ubuntu14.04 64位的。然後就是安裝WPS了(戳這裏進入官網下載)。因為官網提供的WPS是32位的操作系統,所以64位的操作系統不
Node.js學習之旅(二)-----MongoDB的安裝與啟動
tar 商業 blank script img blog javascrip ref es2017 安裝與啟動MongoDB Windows 用戶向導:https://docs.mongodb.com/manual/tutorial/install-mongodb-on-
ubuntu14.04.4_server_32位安裝
sele -h nbsp AI ubuntu14 album server html com 參考: http://jingyan.baidu.com/album/3ea51489fa1ba252e71bba79.html?picindex=27 http://ji
2.11.2.ubuntu14.04上網及安裝openssh
http pen 開發 能力 介紹 blog 問題 Opens 筆記本 本節詳細介紹ubuntu14.04的網絡配置問題,然後安裝openssh-server,最後用sshsecureshell登錄。 2.11.2.1、ubuntu14.04上網問題 (1)虛擬機上網有2種
ubuntu14.04 electron-SSR 安裝配置
參考:https://blog.csdn.net/weixin_37747104/article/details/82911803 一、什麼是ssr ssr簡稱shadowsocksR,可以登入你的vpn,其餘我就不便多說了 二、怎麼安裝 宣告:這是一個github上的專案:
ubuntu14.04 docker-compose安裝和使用
一、介紹 Docker Compose 是一個執行多容器 Docker 應用的工具。Compose 通過一個配置檔案來配置一個應用的服務,然後通過一個命令建立並啟動所有在配置檔案中指定的服務。 二、安裝 sudo curl -L https://github.com
Ubuntu14.04 nfs伺服器安裝配置
1.安裝nfs伺服器 [email protected]:~$ dpkg -l |grep nfs #檢視是否安裝有nfs [email protected]:~$ sudo apt-get install nfs-kernel-server [e
Kafka學習之路 (四)Kafka的安裝
server 表達 mage 配置 list 執行 ase cti releases zookeeper1:192.168.1.11 zookeeper2:192.168.1.12 zookeeper3:192.168.1.13 kafka1:192.168.1.14 k
ubuntu14.04 google 瀏覽器安裝
網上關於ubnutu14 google瀏覽器的安裝基本都嘗試了,無賴都沒有成功,所以有了以下這一篇。如果你也遇到同樣的問題請往下看,本文方法已經在unbuntu14 系統下測試成功。 1.在終端中,輸入以下命令: sudo w
ubuntu14.04+GTX1080Ti+CUDA安裝
本文在ubuntu14.04(X64)系統上配置深度學習基礎環境(安裝顯示卡驅動和cuda),顯示卡型號:GTX1080Ti,cuda版本:cuda8.0 準備: 顯示卡驅動下載 CUDA下載 注意安裝ubuntu14.04.5系統的時候,注意用UEFI模式安裝