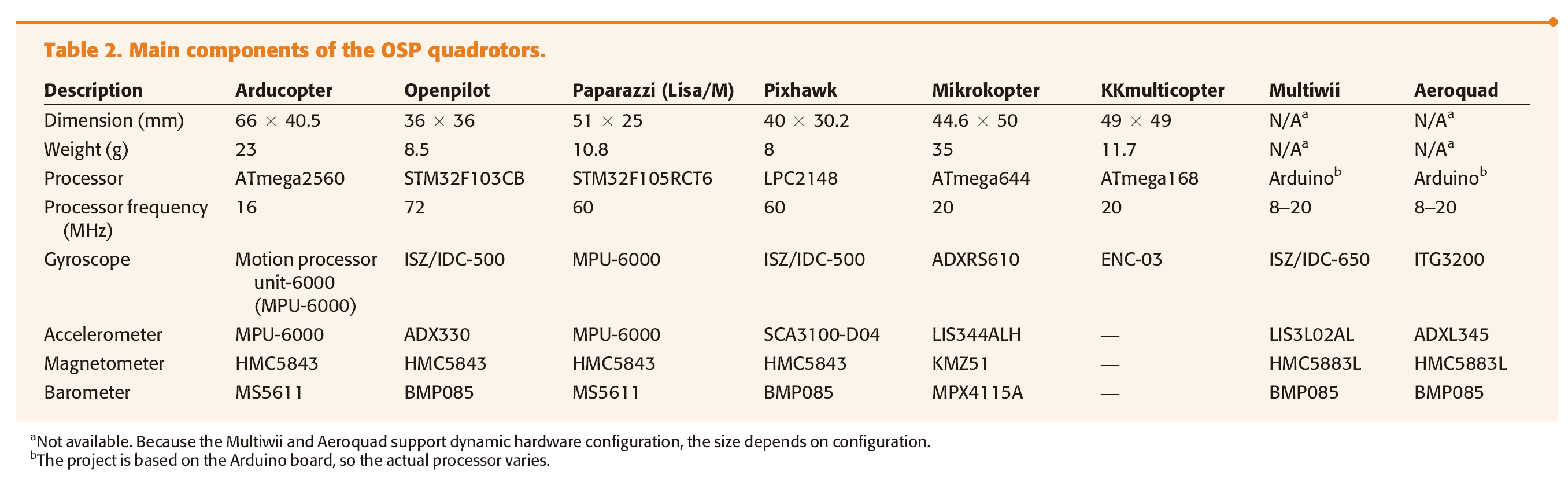
玩轉四旋翼無人機(感測器)
IMU
一個典型的IMU包括一個三軸陀螺儀,一個三軸加速度計和一個三軸磁力計。首先定義慣性座標系
陀螺儀
陀螺儀測量
加速度計
加速度計測量由於外力引起的對
磁力計
加速度計和磁力計可以提供姿態的絕對數值,陀螺儀可以補充角速度。
MEMS類加速度計的工作原理是當加速度計連同外界物體(該物體的加速度就是待測的加速度)一起作加速運動時,質量塊就受到慣性力的作用向相反的方向運動。質量塊發生的位移受到彈簧和阻尼器的限制,通過輸出電壓就能測得外界的加速度大小。
陀螺儀能夠測量沿一個軸或幾個軸運動的角速度,可與MEMS加速度計(加速計)形成優勢互補,如果組合使用加速度計和陀螺儀這兩種感測器,設計者就能更好地跟蹤並捕捉三維空間的完整運動,為終端使用者提供現場感更強的使用者使用體驗、精確的導航系統以及其它功能。
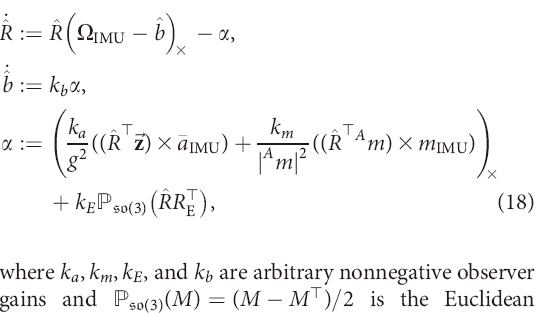
matrix projection onto skew-symmetric matrices. If any one of the measurements in the innovation a are not available or unreliable, then the corresponding gain should be set to zero in the observer.
A particular advantage of this observer formulation is that the gains can be adjusted in real time as long as care is taken that the bias gain is small. Adjusting the gains in real time allows one to use the accelerometer during a period when the vehicle is in hover and then set the gain
估計位姿
多數四旋翼飛行器使用陀螺儀和加速度計構成慣性測量單元,通過互補濾波器或卡爾曼濾波器等演算法進行姿態估計。
估計位置
- IMU。 現有方法中沒有有效的使用IMU方法測量絕對位置。
there is no effective way to use the IMU to estimate absolute height; at best, some low-frequency information from the z axis of the accelerometer provides limited information about vertical motion
氣壓計。 大部分氣壓計可以測出絕對高度(to a few centimeters). GPS , 主要用於室外空曠環境,精度大致在1-2m左右。 acoustic, laser-ranging or infrared sensors 視覺方法
- 使用光流和視覺里程計相結合的方式,使四旋翼飛行器在未知環境下進行自主地圖建立和探測。兩個攝像機面向前方安裝,構成立體視覺系統,基線長度 8 釐米。一個攝像機面向地面安裝,作為光流感測器,配合超聲波高度計,對飛行器速度進行估計。
視覺方法有一些問題
1. 計算量大,對處理器的要求高。
2. 對於一些平移和旋轉之間存在模糊,尤其是視角較小的時候。
3. 對於單目視覺,無法恢復motion scale.(refer to structure from motion)
4. 當相機 相對於無人機位姿固定時,在控制無人機姿態時,如果使用roll和pitch自由度來改變推力的方向至所需的位移運動方向,會在影象中產生巨大的運動。Third, the underactuated quadrotor uses the roll and pitch DoF to point the thrust vector in the direction of the desired translational motion. For a camera that is rigidly attached to the quadrotor, this attitude control motion induces a large apparent motion in the image. It is therefore necessary to estimate vehicle attitude at the instant the image was captured by the sensor to eliminate this effect. Biological systems face similar problems, and interestingly, mammals and insects have developed similar solutions: gyroscopic sensors (the vestibular sensors of the inner ear and the halteres)