OpenCV 透視變換例項
阿新 • • 發佈:2019-01-24

參考文獻:
透視變換:
具體流程為:
a)載入影象→灰度化→邊緣處理得到邊緣影象(edge map)
cv::Mat im = cv::imread(filename);
cv::Mat gray;
cvtColor(im,gray,CV_BGR2GRAY);
Canny(gray,gray,100,150,3);
b)霍夫變換進行直線檢測,此處使用的是probabilistic Hough transform(cv::HoughLinesP)而不是standard Hough transform(cv::HoughLines)
std::vector<Vec4i> lines;
cv::HoughLinesP(gray,lines,1,CV_PI/180,70,30,10);
for(int i = 0; i < lines.size(); i++)
line(im,cv::Point(lines[i][0],lines[i][1]),cv::Point(lines[i][2],lines[i][3]),Scalar(255,0,0),2,8,0);
c)通過上面的圖我們可以看出,通過霍夫變換檢測到的直線並沒有將整個邊緣包含,但是我們要求的是四個頂點所以並不一定要直線真正的相交,下面就要求四個頂點的座標,公式為:

| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
cv::Point2f computeIntersect(cv::Vec4i a, cv::Vec4i b)
{
intx1 = a[0], y1 = a[1], x2 = a[2], y2 = a[3];
intx3 = b[0], y3 = b[1], x4 = b[2], y4 = b[3];
if(floatd = ((float)(x1-x2)
* (y3-y4)) - ((y1-y2) * (x3-x4)))
{
cv::Point2f pt;
pt.x = ((x1*y2 - y1*x2) * (x3-x4) - (x1-x2) * (x3*y4 - y3*x4)) / d;pt.y = ((x1*y2 - y1*x2) * (y3-y4) - (y1-y2) * (x3*y4 - y3*x4)) / d;
returnpt;
}
else
returncv::Point2f(-1, -1);
}
|
| 1 2 3 4 5 6 7 8 9 10 |
std::vector<cv::Point2f> corners;
for
(int i = 0; i < lines.size(); i++)
{
for(intj = i+1; j < lines.size(); j++)
{
cv::Point2f pt = computeIntersect(lines[i], lines[j]);
if(pt.x >= 0 && pt.y >= 0)
corners.push_back(pt);
}
}
|
| 1 2 3 4 5 6 7 8 9 |
std::vector<cv::Point2f> approx;
cv::approxPolyDP(cv::Mat(corners), approx,
cv::arcLength(cv::Mat(corners),true) * 0.02,true);
if
(approx.size() != 4)
{
std::cout <<"The object is not quadrilateral!"<< std::endl;
return-1;
}
|
void
sortCorners(std::vector<cv::Point2f>& corners, cv::Point2f center)
{
std::vector<cv::Point2f> top, bot;
for(inti = 0; i < corners.size(); i++)
{
if(corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.clear();
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
|
下面是獲得中心點座標然後利用上面的函式確定四個頂點的座標
?
for
(int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
sortCorners(corners, center);
|
定義目的影象並初始化為0
?
cv::Mat quad = cv::Mat::zeros(300, 220, CV_8UC3);
|
獲取目的影象的四個頂點
?
std::vector<cv::Point2f> dst_pt;
dst.push_back(cv::Point2f(0,0));
dst.push_back(cv::Point2f(quad.cols,0));
dst.push_back(cv::Point2f(quad.cols,quad.rows));
dst.push_back(cv::Point2f(0,quad.rows));
|
計算對映矩陣
?
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
|
進行透視變換並顯示結果
?
cv::warpPerspective(im, quad, transmtx, quad.size());
cv::imshow("quadrilateral", quad);
|
// affine transformation.cpp : 定義控制檯應用程式的入口點。
//
#include "stdafx.h"
/**
* Automatic perspective correction for quadrilateral objects. See the tutorial at
* http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
*/
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
cv::Point2f center(0,0);
cv::Point2f computeIntersect(cv::Vec4i a, cv::Vec4i b)
{
int x1 = a[0], y1 = a[1], x2 = a[2], y2 = a[3], x3 = b[0], y3 = b[1], x4 = b[2], y4 = b[3];
float denom;
if (float d = ((float)(x1 - x2) * (y3 - y4)) - ((y1 - y2) * (x3 - x4)))
{
cv::Point2f pt;
pt.x = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / d;
pt.y = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / d;
return pt;
}
else
return cv::Point2f(-1, -1);
}
void sortCorners(std::vector<cv::Point2f>& corners,
cv::Point2f center)
{
std::vector<cv::Point2f> top, bot;
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2){
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
int main()
{
cv::Mat src = cv::imread("image.jpg");
if (src.empty())
return -1;
cv::Mat bw;
cv::cvtColor(src, bw, CV_BGR2GRAY);
cv::blur(bw, bw, cv::Size(3, 3));
cv::Canny(bw, bw, 100, 100, 3);
std::vector<cv::Vec4i> lines;
cv::HoughLinesP(bw, lines, 1, CV_PI/180, 70, 30, 10);
// Expand the lines
for (int i = 0; i < lines.size(); i++)
{
cv::Vec4i v = lines[i];
lines[i][0] = 0;
lines[i][1] = ((float)v[1] - v[3]) / (v[0] - v[2]) * -v[0] + v[1];
lines[i][2] = src.cols;
lines[i][3] = ((float)v[1] - v[3]) / (v[0] - v[2]) * (src.cols - v[2]) + v[3];
}
std::vector<cv::Point2f> corners;
for (int i = 0; i < lines.size(); i++)
{
for (int j = i+1; j < lines.size(); j++)
{
cv::Point2f pt = computeIntersect(lines[i], lines[j]);
if (pt.x >= 0 && pt.y >= 0)
corners.push_back(pt);
}
}
std::vector<cv::Point2f> approx;
cv::approxPolyDP(cv::Mat(corners), approx, cv::arcLength(cv::Mat(corners), true) * 0.02, true);
if (approx.size() != 4)
{
std::cout << "The object is not quadrilateral!" << std::endl;
return -1;
}
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
sortCorners(corners, center);
if (corners.size() == 0){
std::cout << "The corners were not sorted correctly!" << std::endl;
return -1;
}
cv::Mat dst = src.clone();
// Draw lines
for (int i = 0; i < lines.size(); i++)
{
cv::Vec4i v = lines[i];
cv::line(dst, cv::Point(v[0], v[1]), cv::Point(v[2], v[3]), CV_RGB(0,255,0));
}
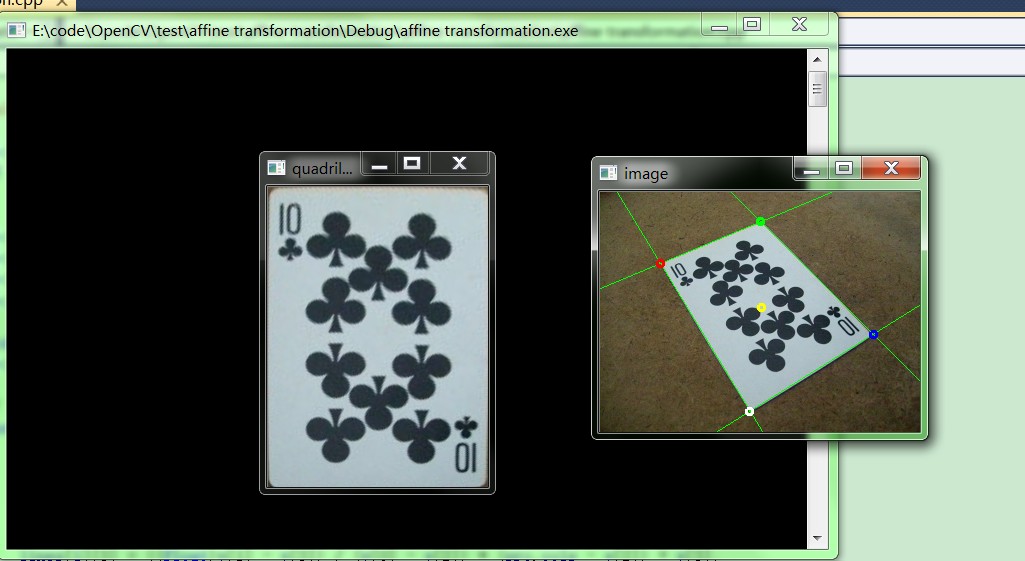
// Draw corner points
cv::circle(dst, corners[0], 3, CV_RGB(255,0,0), 2);
cv::circle(dst, corners[1], 3, CV_RGB(0,255,0), 2);
cv::circle(dst, corners[2], 3, CV_RGB(0,0,255), 2);
cv::circle(dst, corners[3], 3, CV_RGB(255,255,255), 2);
// Draw mass center
cv::circle(dst, center, 3, CV_RGB(255,255,0), 2);
cv::Mat quad = cv::Mat::zeros(300, 220, CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
cv::imshow("image", dst);
cv::imshow("quadrilateral", quad);
cv::waitKey();
return 0;
}
實現結果: