
ROS turtlebot_follower :讓機器人跟隨我們移動
阿新 • • 發佈:2019-01-25
ROS turtlebot_follower 學習
首先在catkin_ws/src目錄下載原始碼,地址:https://github.com/turtlebot/turtlebot_apps.git
瞭解程式碼見註釋(其中有些地方我也不是很明白)
follower.cpp
#include <ros/ros.h>
#include <pluginlib/class_list_macros.h>
#include <nodelet/nodelet.h>
#include <geometry_msgs/Twist.h>
#include <sensor_msgs/Image.h>
#include <visualization_msgs/Marker.h>
#include <turtlebot_msgs/SetFollowState.h>
#include "dynamic_reconfigure/server.h" 接下來看launch檔案follower.launch
建議在修改前,將原先的程式碼註釋掉,不要刪掉。
<!--
The turtlebot people (or whatever) follower nodelet.
-->
<launch>
<arg name="simulation" default="false"/>
<group unless="$(arg simulation)"> <!-- Real robot -->
<include file="$(find turtlebot_follower)/launch/includes/velocity_smoother.launch.xml">
<arg name="nodelet_manager" value="/mobile_base_nodelet_manager"/>
<arg name="navigation_topic" value="/cmd_vel_mux/input/navi"/>
</include>
<!--modify by 2016.11.07 啟動我的機器人和攝像頭,這裡更換成你的機器人的啟動檔案和攝像頭啟動檔案-->
<include file="$(find handsfree_hw)/launch/handsfree_hw.launch">
</include>
<include file="$(find handsfree_bringup)/launch/xtion_fake_laser_openni2.launch">
</include>
<!-- 將原先的註釋掉<include file="$(find turtlebot_bringup)/launch/3dsensor.launch">
<arg name="rgb_processing" value="true"/>
<arg name="depth_processing" value="true"/>
<arg name="depth_registered_processing" value="false"/>
<arg name="depth_registration" value="false"/>
<arg name="disparity_processing" value="false"/>
<arg name="disparity_registered_processing" value="false"/>
<arg name="scan_processing" value="false"/>
</include>-->
<!--modify end -->
</group>
<group if="$(arg simulation)">
<!-- Load nodelet manager for compatibility -->
<node pkg="nodelet" type="nodelet" ns="camera" name="camera_nodelet_manager" args="manager"/>
<include file="$(find turtlebot_follower)/launch/includes/velocity_smoother.launch.xml">
<arg name="nodelet_manager" value="camera/camera_nodelet_manager"/>
<arg name="navigation_topic" value="cmd_vel_mux/input/navi"/>
</include>
</group>
<param name="camera/rgb/image_color/compressed/jpeg_quality" value="22"/>
<!-- Make a slower camera feed available; only required if we use android client -->
<node pkg="topic_tools" type="throttle" name="camera_throttle"
args="messages camera/rgb/image_color/compressed 5"/>
<include file="$(find turtlebot_follower)/launch/includes/safety_controller.launch.xml"/>
<!-- Real robot: Load turtlebot follower into the 3d sensors nodelet manager to avoid pointcloud serializing -->
<!-- Simulation: Load turtlebot follower into nodelet manager for compatibility -->
<node pkg="nodelet" type="nodelet" name="turtlebot_follower"
args="load turtlebot_follower/TurtlebotFollower camera/camera_nodelet_manager">
<!--更換成你的機器人的移動topic,我的是/mobile_base/mobile_base_controller/cmd_vel-->
<remap from="turtlebot_follower/cmd_vel" to="/mobile_base/mobile_base_controller/cmd_vel"/>
<remap from="depth/points" to="camera/depth/points"/>
<param name="enabled" value="true" />
<!--<param name="x_scale" value="7.0" />-->
<!--<param name="z_scale" value="2.0" />
<param name="min_x" value="-0.35" />
<param name="max_x" value="0.35" />
<param name="min_y" value="0.1" />
<param name="max_y" value="0.6" />
<param name="max_z" value="1.2" />
<param name="goal_z" value="0.6" />-->
<!-- test 可以在此處調節引數-->
<param name="x_scale" value="1.5"/>
<param name="z_scale" value="1.0" />
<param name="min_x" value="-0.35" />
<param name="max_x" value="0.35" />
<param name="min_y" value="0.1" />
<param name="max_y" value="0.5" />
<param name="max_z" value="1.5" />
<param name="goal_z" value="0.6" />
</node>
<!-- Launch the script which will toggle turtlebot following on and off based on a joystick button. default: on -->
<node name="switch" pkg="turtlebot_follower" type="switch.py"/>
<!--modify 2016.11.07 在turtlebot_follower下新建follow.rviz檔案,載入rviz,此時rviz內容為空-->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find turtlebot_follower)/follow.rviz"/>
<!--modify end -->
</launch>編譯,執行follow.launch 會將機器人和攝像頭,rviz都啟動起來,只需要執行這一個launch就可以了。
rviz中新增兩個marker,pointcloud,camera。如圖:
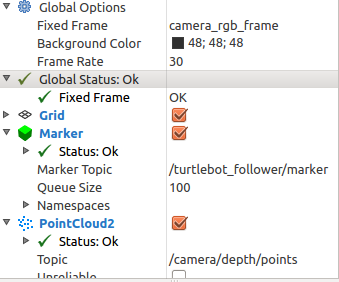
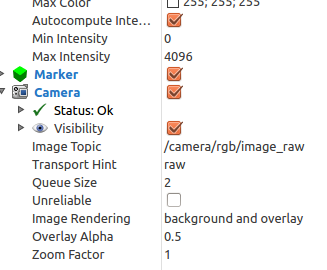
topic與frame名稱與程式碼中要保持一致。
新增完之後,rviz顯示如圖:
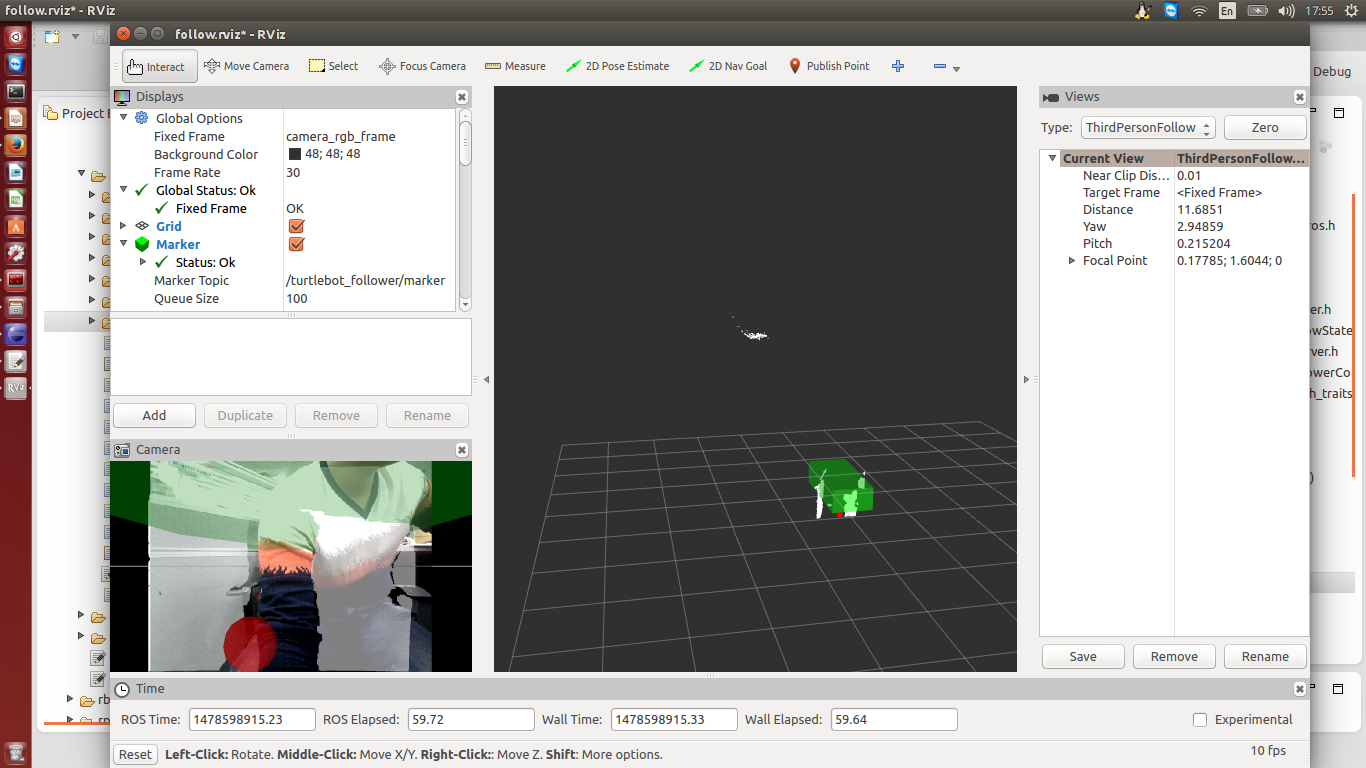
紅點代表質心,綠框代表感興趣區域
當紅點在我們身上時,機器人會跟隨我們運動,注意:走動時,我們的速度要慢一點,機器人的移動速度也要調慢一點。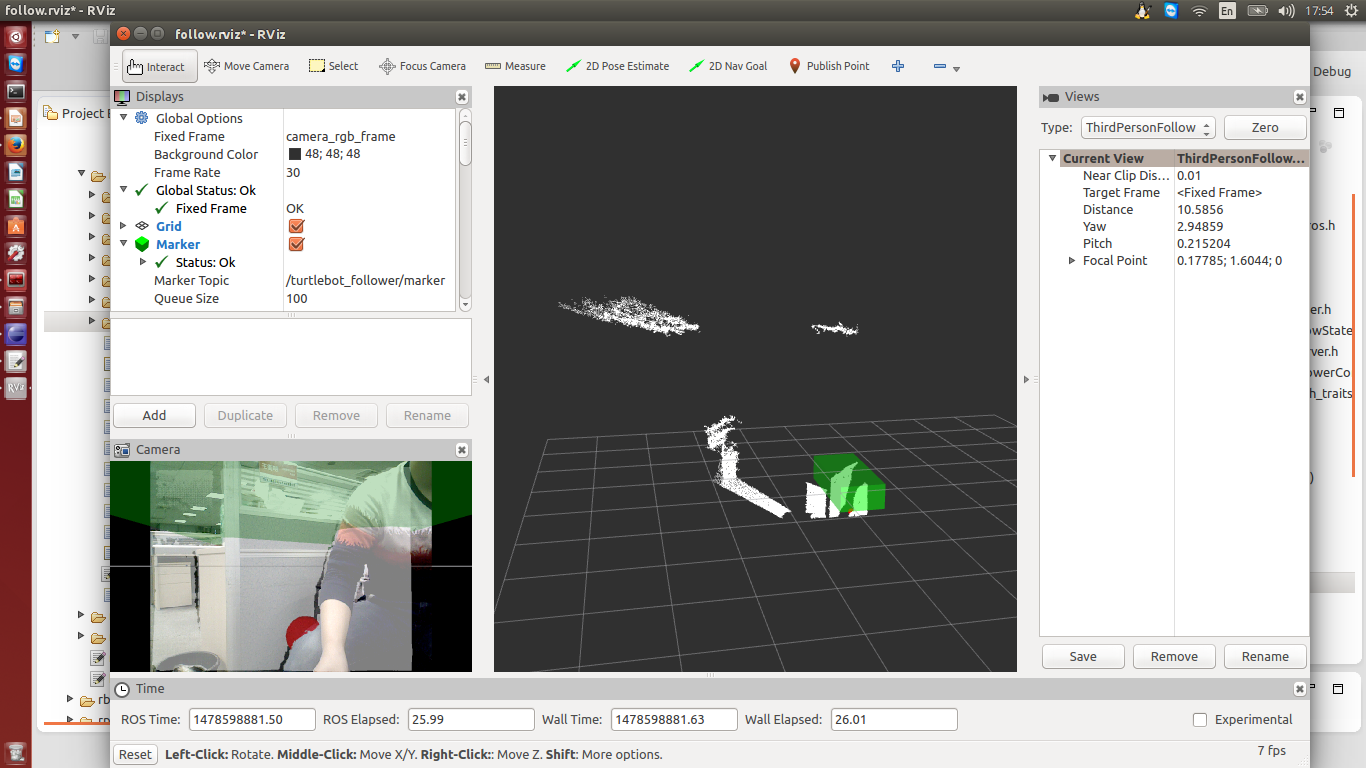
當感興趣區域沒有紅點時,機器人停止跟隨,直到出現紅點。