ros:kcf演算法+行人檢測 = 讓機器人自動識別並追蹤行人
實現目標:機器人檢測到有人走過來,迎上去並開始追蹤。
追蹤演算法使用kcf演算法,關於kcf追蹤的ros庫在github地址 https://github.com/TianyeAlex/tracker_kcf_ros,kcf演算法是目前追蹤演算法中比較好的,程式跑起來後效果也是不錯的。我能力有限,在這裡不作介紹。有興趣的可以去研究一下。這裡主要講一下在次基礎上新增行人檢測,做到自動追蹤。
訓練庫地址:http://download.csdn.net/detail/yiranhaiziqi/9711174,下載後放到src目錄下。
追蹤的程式碼結構
作者將kcf演算法封裝起來,在runtracker.cpp裡面呼叫。
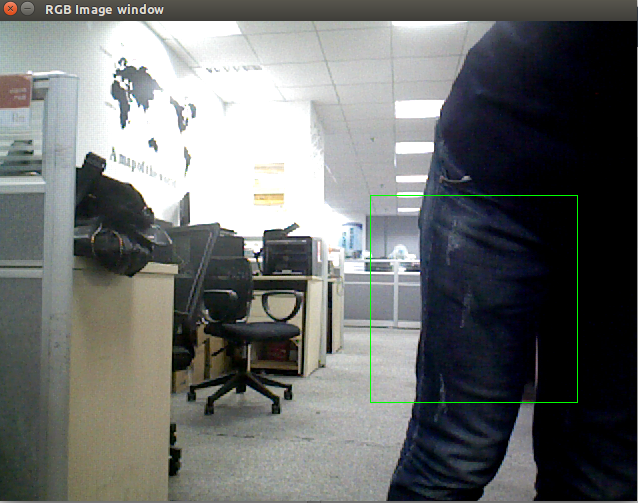
程式跑起來的效果
出現一個視窗,用滑鼠左鍵選中一個區域作為感興趣區域,之後機器人會跟蹤這個區域。例如,選中畫面中的椅子,移動椅子之後,機器人會跟隨移動。選中畫面中的人或者人的某個部位都可以實現人物跟蹤。我要想實現自動追蹤,就是把滑鼠選擇跟蹤物變成自動選擇跟蹤物,這裡的跟蹤物就是行人。
首先要先實現行人檢測,在opencv中,有行人檢測的demo,路徑在opencv-2.4.13/samples/cpp/peopledetect.cpp。接下來做的就是把程式碼結合起來。
簡單介紹一下runtracker.cpp。
ImageConverter類是核心
初始化我們要接受/傳送主題的Publisher 和Subscriber,設定相應的回掉函式。
image_sub_ = it_.subscribe("/camera/rgb/image_rect_color", 1,&ImageConverter::imageCb, this);
depth_sub_ = it_.subscribe("/camera/depth/image", 1,&ImageConverter::depthCb, this);
pub = nh_.advertise<geometry_msgs::Twist>("/mobile_base/mobile_base_controller/cmd_vel", 1000);image_sub_是接受rgb圖的subscribe,執行imageCb回掉函式,imageCb主要是將攝像頭的資料顯示在視窗中,選擇感興趣區域。
depth_sub_是接受深度圖的subscribe,執行depthCb回掉函式,depthCb作用就是計算距離和方向。
瞭解到這裡之後,要將手動選擇感興趣區域改為自動選擇感興趣區域,必然是在imageCb函式中修改。
imageCb中 cv::setMouseCallback(RGB_WINDOW, onMouse, 0);監聽滑鼠操作,如果滑鼠不動,程式不會往下執行。onMouse為滑鼠監聽回撥。要實現自動選擇肯定就不能用這個了,將其注掉。
再來看下onMouse函式做了什麼事
void onMouse(int event, int x, int y, int, void*)
{
if (select_flag)
{
selectRect.x = MIN(origin.x, x);
selectRect.y = MIN(origin.y, y);
selectRect.width = abs(x - origin.x);
selectRect.height = abs(y - origin.y);
selectRect &= cv::Rect(0, 0, rgbimage.cols, rgbimage.rows);
}
if (event == CV_EVENT_LBUTTONDOWN)
{
bBeginKCF = false;
select_flag = true;
origin = cv::Point(x, y);
selectRect = cv::Rect(x, y, 0, 0);
}
else if (event == CV_EVENT_LBUTTONUP)
{
select_flag = false;
bRenewROI = true;
}
}當按下滑鼠左鍵時,這個點就是起始點,按住滑鼠左鍵移動滑鼠,會選擇感興趣區域,鬆開滑鼠左鍵,bRenewROI = true;修改標誌,表示新的roi區域selectRect已經產生。在imageCb中程式繼續執行,初始化KCFTracker,開始追蹤。
到這裡基本的流程已經比較清晰了,接下來開始將行人檢測代替手動選擇roi區域。
preparePeopleDetect()函式是初始化檢測,
peopleDetect()函式是開始檢測。
void preparePeopleDetect()
{
has_dectect_people = false;
//hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());//使用預設的訓練資料,下面是使用自己的訓練資料。
MySVM svm;
string path = ros::package::getPath("track_pkg")+"/src/12000neg_2400pos.xml";
printf("path === %s",path.c_str());
//svm.load("/home/server/catkin_ws/src/tracker_kcf_ros/src/track_pkg/src/12000neg_2400pos.xml");
svm.load(path.c_str());
DescriptorDim = svm.get_var_count();//特徵向量的維數,即HOG描述子的維數
int supportVectorNum = svm.get_support_vector_count();//支援向量的個數
cout<<"支援向量個數:"<<supportVectorNum<<endl;
Mat alphaMat = Mat::zeros(1, supportVectorNum, CV_32FC1);//alpha向量,長度等於支援向量個數
Mat supportVectorMat = Mat::zeros(supportVectorNum, DescriptorDim, CV_32FC1);//支援向量矩陣
Mat resultMat = Mat::zeros(1, DescriptorDim, CV_32FC1);//alpha向量乘以支援向量矩陣的結果
//將支援向量的資料複製到supportVectorMat矩陣中
for(int i=0; i<supportVectorNum; i++)
{
const float * pSVData = svm.get_support_vector(i);//返回第i個支援向量的資料指標
for(int j=0; j<DescriptorDim; j++)
{
supportVectorMat.at<float>(i,j) = pSVData[j];
}
}
//將alpha向量的資料複製到alphaMat中
double * pAlphaData = svm.get_alpha_vector();//返回SVM的決策函式中的alpha向量
for(int i=0; i<supportVectorNum; i++)
{
alphaMat.at<float>(0,i) = pAlphaData[i];
}
//計算-(alphaMat * supportVectorMat),結果放到resultMat中
//gemm(alphaMat, supportVectorMat, -1, 0, 1, resultMat);//不知道為什麼加負號?
resultMat = -1 * alphaMat * supportVectorMat;
//得到最終的setSVMDetector(const vector<float>& detector)引數中可用的檢測子
//將resultMat中的資料複製到陣列myDetector中
for(int i=0; i<DescriptorDim; i++)
{
myDetector.push_back(resultMat.at<float>(0,i));
}
//最後新增偏移量rho,得到檢測子
myDetector.push_back(svm.get_rho());
cout<<"檢測子維數:"<<myDetector.size()<<endl;
hog.setSVMDetector(myDetector);
ofstream fout("HOGDetectorForOpenCV.txt");
for(int i=0; i<myDetector.size(); i++)
{
fout<<myDetector[i]<<endl;
}
printf("Start the tracking process\n");
}
//行人檢測
void peopleDetect()
{
if(has_dectect_people)
return;
vector<Rect> found, found_filtered;
double t = (double)getTickCount();
hog.detectMultiScale(rgbimage, found, 0, Size(8,8), Size(32,32), 1.05, 2);
t = (double)getTickCount() - t;
//printf("tdetection time = %gms\n", t*1000./cv::getTickFrequency());
size_t i, j;
printf("found.size==%d",found.size());
for( i = 0; i < found.size(); i++ )
{
Rect r = found[i];
for( j = 0; j < found.size(); j++ )
if( j != i && (r & found[j]) == r)
break;
if( j == found.size() )
found_filtered.push_back(r);
}
Rect r ;
for( i = 0; i < found_filtered.size(); i++ )
{
r = found_filtered[i];
// the HOG detector returns slightly larger rectangles than the real objects.
// so we slightly shrink the rectangles to get a nicer output.
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.07);
r.height = cvRound(r.height*0.8);
//rectangle(rgbimage, r.tl(), r.br(), cv::Scalar(0,255,0), 3);
//printf("r.x==%d,y==%d,width==%d,height==%d\n",r.x,r.y,r.width,r.height);
}
//防止誤檢測
if(r.width>100&&r.height>350){
has_dectect_people=true;
selectRect.x = r.x+(r.width-roi_width)/2;
selectRect.y = r.y+(r.height-roi_height)/2;
selectRect.width = roi_width;
selectRect.height = roi_height;
printf("selectRect.x==%d,y==%d,width==%d,height==%d\n",selectRect.x,selectRect.y,selectRect.width,selectRect.height);
}//imshow(RGB_WINDOW, rgbimage);
}檢測到人後,人所在的區域是一個矩形,我這裡在矩形區域內取其中間100*100的矩形為感興趣區域。檢測到人後將has_dectect_people置為true,使其不會再次檢測。設定bRenewROI = true;select_flag = true;
select_flag:當追蹤目標未消失時,為true,消失時為false,與bRenewROI一起作為是否重新檢測行人追蹤的標記。
完整程式碼如下
#include <iostream>
#include <fstream>
#include <sstream>
#include <algorithm>
#include <dirent.h>
#include <math.h>
#include <ros/ros.h>
#include <ros/package.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include "geometry_msgs/Twist.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/objdetect/objdetect.hpp"
#include <stdio.h>
#include <string.h>
#include <ctype.h>
#include "kcftracker.hpp"
using namespace cv;
using namespace std;
static const std::string RGB_WINDOW = "RGB Image window";
//static const std::string DEPTH_WINDOW = "DEPTH Image window";
#define Max_linear_speed 1
#define Min_linear_speed 0.4
#define Min_distance 1.0
#define Max_distance 5.0
#define Max_rotation_speed 0.75
float linear_speed = 0;
float rotation_speed = 0;
float k_linear_speed = (Max_linear_speed - Min_linear_speed) / (Max_distance - Min_distance);
float h_linear_speed = Min_linear_speed - k_linear_speed * Min_distance;
float k_rotation_speed = 0.004;
float h_rotation_speed_left = 1.2;
float h_rotation_speed_right = 1.36;
float distance_scale = 1.0;
int ERROR_OFFSET_X_left1 = 100;
int ERROR_OFFSET_X_left2 = 300;
int ERROR_OFFSET_X_right1 = 340;
int ERROR_OFFSET_X_right2 = 600;
int roi_height = 100;
int roi_width = 100;
cv::Mat rgbimage;
cv::Mat depthimage;
cv::Rect selectRect;
cv::Point origin;
cv::Rect result;
bool select_flag = false;
bool bRenewROI = false; // the flag to enable the implementation of KCF algorithm for the new chosen ROI
bool bBeginKCF = false;
bool enable_get_depth = false;
bool HOG = true;
bool FIXEDWINDOW = false;
bool MULTISCALE = true;
bool SILENT = true;
bool LAB = false;
int DescriptorDim;
bool has_dectect_people ;
// Create KCFTracker object
KCFTracker tracker(HOG, FIXEDWINDOW, MULTISCALE, LAB);
vector<float> myDetector;
float dist_val[5] ;
/*void onMouse(int event, int x, int y, int, void*)
{
if (select_flag)
{
selectRect.x = MIN(origin.x, x);
selectRect.y = MIN(origin.y, y);
selectRect.width = abs(x - origin.x);
selectRect.height = abs(y - origin.y);
selectRect &= cv::Rect(0, 0, rgbimage.cols, rgbimage.rows);
}
if (event == CV_EVENT_LBUTTONDOWN)
{
bBeginKCF = false;
select_flag = true;
origin = cv::Point(x, y);
selectRect = cv::Rect(x, y, 0, 0);
}
else if (event == CV_EVENT_LBUTTONUP)
{
select_flag = false;
bRenewROI = true;
}
}*/
class MySVM : public CvSVM
{
public:
//獲得SVM的決策函式中的alpha陣列
double * get_alpha_vector()
{
return this->decision_func->alpha;
}
//獲得SVM的決策函式中的rho引數,即偏移量
float get_rho()
{
return this->decision_func->rho;
}
};
class ImageConverter
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Subscriber depth_sub_;
HOGDescriptor hog;
public:
ros::Publisher pub;
ImageConverter()
: it_(nh_)
{
// Subscrive to input video feed and publish output video feed
image_sub_ = it_.subscribe("/camera/rgb/image_rect_color", 1,&ImageConverter::imageCb, this);
depth_sub_ = it_.subscribe("/camera/depth/image", 1,&ImageConverter::depthCb, this);
pub = nh_.advertise<geometry_msgs::Twist>("/mobile_base/mobile_base_controller/cmd_vel", 1000);
//pub = nh_.advertise<geometry_msgs::Twist>("/cmd_vel", 1000);
preparePeopleDetect();
cv::namedWindow(RGB_WINDOW);
//cv::namedWindow(DEPTH_WINDOW);
}
~ImageConverter()
{
cv::destroyWindow(RGB_WINDOW);
//cv::destroyWindow(DEPTH_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv_ptr->image.copyTo(rgbimage);
peopleDetect();
if(has_dectect_people&&!select_flag)
{
printf("has_dectect_people = true \n");
selectRect &= cv::Rect(0,0,rgbimage.cols,rgbimage.rows);
bRenewROI = true;
select_flag = true;
}
//cv::setMouseCallback(RGB_WINDOW, onMouse, 0);
if(bRenewROI)
{
// if (selectRect.width <= 0 || selectRect.height <= 0)
// {
// bRenewROI = false;
// //continue;
// }
tracker.init(selectRect, rgbimage);
bBeginKCF = true;
bRenewROI = false;
enable_get_depth = false;
}
if(bBeginKCF)
{
result = tracker.update(rgbimage);
cv::rectangle(rgbimage, result, cv::Scalar( 0, 255,0 ), 1, 8 );
enable_get_depth = true;
}
else
cv::rectangle(rgbimage, selectRect, cv::Scalar(0, 255, 0), 2, 8, 0);
cv::imshow(RGB_WINDOW, rgbimage);
cv::waitKey(1);
}
void preparePeopleDetect()
{
has_dectect_people = false;
//hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
MySVM svm;
string path = ros::package::getPath("track_pkg")+"/src/12000neg_2400pos.xml";
printf("path === %s",path.c_str());
//svm.load("/home/server/catkin_ws/src/tracker_kcf_ros/src/track_pkg/src/12000neg_2400pos.xml");
svm.load(path.c_str());
DescriptorDim = svm.get_var_count();//特徵向量的維數,即HOG描述子的維數
int supportVectorNum = svm.get_support_vector_count();//支援向量的個數
cout<<"支援向量個數:"<<supportVectorNum<<endl;
Mat alphaMat = Mat::zeros(1, supportVectorNum, CV_32FC1);//alpha向量,長度等於支援向量個數
Mat supportVectorMat = Mat::zeros(supportVectorNum, DescriptorDim, CV_32FC1);//支援向量矩陣
Mat resultMat = Mat::zeros(1, DescriptorDim, CV_32FC1);//alpha向量乘以支援向量矩陣的結果
//將支援向量的資料複製到supportVectorMat矩陣中
for(int i=0; i<supportVectorNum; i++)
{
const float * pSVData = svm.get_support_vector(i);//返回第i個支援向量的資料指標
for(int j=0; j<DescriptorDim; j++)
{
supportVectorMat.at<float>(i,j) = pSVData[j];
}
}
//將alpha向量的資料複製到alphaMat中
double * pAlphaData = svm.get_alpha_vector();//返回SVM的決策函式中的alpha向量
for(int i=0; i<supportVectorNum; i++)
{
alphaMat.at<float>(0,i) = pAlphaData[i];
}
//計算-(alphaMat * supportVectorMat),結果放到resultMat中
//gemm(alphaMat, supportVectorMat, -1, 0, 1, resultMat);//不知道為什麼加負號?
resultMat = -1 * alphaMat * supportVectorMat;
//得到最終的setSVMDetector(const vector<float>& detector)引數中可用的檢測子
//將resultMat中的資料複製到陣列myDetector中
for(int i=0; i<DescriptorDim; i++)
{
myDetector.push_back(resultMat.at<float>(0,i));
}
//最後新增偏移量rho,得到檢測子
myDetector.push_back(svm.get_rho());
cout<<"檢測子維數:"<<myDetector.size()<<endl;
hog.setSVMDetector(myDetector);
ofstream fout("HOGDetectorForOpenCV.txt");
for(int i=0; i<myDetector.size(); i++)
{
fout<<myDetector[i]<<endl;
}
printf("Start the tracking process\n");
}
//行人檢測
void peopleDetect()
{
if(has_dectect_people)
return;
vector<Rect> found, found_filtered;
double t = (double)getTickCount();
hog.detectMultiScale(rgbimage, found, 0, Size(8,8), Size(32,32), 1.05, 2);
t = (double)getTickCount() - t;
//printf("tdetection time = %gms\n", t*1000./cv::getTickFrequency());
size_t i, j;
printf("found.size==%d",found.size());
for( i = 0; i < found.size(); i++ )
{
Rect r = found[i];
for( j = 0; j < found.size(); j++ )
if( j != i && (r & found[j]) == r)
break;
if( j == found.size() )
found_filtered.push_back(r);
}
Rect r ;
for( i = 0; i < found_filtered.size(); i++ )
{
r = found_filtered[i];
// the HOG detector returns slightly larger rectangles than the real objects.
// so we slightly shrink the rectangles to get a nicer output.
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.07);
r.height = cvRound(r.height*0.8);
//rectangle(rgbimage, r.tl(), r.br(), cv::Scalar(0,255,0), 3);
//printf("r.x==%d,y==%d,width==%d,height==%d\n",r.x,r.y,r.width,r.height);
}
if(r.width>100&&r.height>350){
has_dectect_people=true;
selectRect.x = r.x+(r.width-roi_width)/2;
selectRect.y = r.y+(r.height-roi_height)/2;
selectRect.width = roi_width;
selectRect.height = roi_height;
printf("selectRect.x==%d,y==%d,width==%d,height==%d\n",selectRect.x,selectRect.y,selectRect.width,selectRect.height);
}//imshow(RGB_WINDOW, rgbimage);
}
void depthCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg,sensor_msgs::image_encodings::TYPE_32FC1);
cv_ptr->image.copyTo(depthimage);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'TYPE_32FC1'.", msg->encoding.c_str());
}
if(enable_get_depth)
{
dist_val[0] = depthimage.at<float>(result.y+result.height/3 , result.x+result.width/3) ;
dist_val[1] = depthimage.at<float>(result.y+result.height/3 , result.x+2*result.width/3) ;
dist_val[2] = depthimage.at<float>(result.y+2*result.height/3 , result.x+result.width/3) ;
dist_val[3] = depthimage.at<float>(result.y+2*result.height/3 , result.x+2*result.width/3) ;
dist_val[4] = depthimage.at<float>(result.y+result.height/2 , result.x+result.width/2) ;
float distance = 0;
int num_depth_points = 5;
for(int i = 0; i < 5; i++)
{
if(dist_val[i] > 0.4 && dist_val[i] < 10.0)
distance += dist_val[i];
else
num_depth_points--;
}
distance /= num_depth_points;
//calculate linear speed
if(distance > Min_distance)
linear_speed = distance * k_linear_speed + h_linear_speed;
else if (distance <= Min_distance-0.5){
//linear_speed = 0;
linear_speed =-1* ((Min_distance-0.5) * k_linear_speed + h_linear_speed);
}else{
linear_speed = 0;
}
if( fabs(linear_speed) > Max_linear_speed)
linear_speed = Max_linear_speed;
//calculate rotation speed
int center_x = result.x + result.width/2;
if(center_x < ERROR_OFFSET_X_left1){
printf("center_x <<<<<<<< ERROR_OFFSET_X_left1\n");
rotation_speed = Max_rotation_speed/5;
has_dectect_people = false;
enable_get_depth = false;
select_flag = false;
bBeginKCF = false;
}
else if(center_x > ERROR_OFFSET_X_left1 && center_x < ERROR_OFFSET_X_left2)
rotation_speed = -k_rotation_speed * center_x + h_rotation_speed_left;
else if(center_x > ERROR_OFFSET_X_right1 && center_x < ERROR_OFFSET_X_right2)
rotation_speed = -k_rotation_speed * center_x + h_rotation_speed_right;
else if(center_x > ERROR_OFFSET_X_right2){
printf("center_x >>>>>>>> ERROR_OFFSET_X_right2\n");
rotation_speed = -Max_rotation_speed/5;
has_dectect_people = false;
enable_get_depth = false;
select_flag = false;
bBeginKCF = false;
}
else
rotation_speed = 0;
//std::cout << "linear_speed = " << linear_speed << " rotation_speed = " << rotation_speed << std::endl;
// std::cout << dist_val[0] << " / " << dist_val[1] << " / " << dist_val[2] << " / " << dist_val[3] << " / " << dist_val[4] << std::endl;
// std::cout << "distance = " << distance << std::endl;
}
//cv::imshow(DEPTH_WINDOW, depthimage);
cv::waitKey(1);
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "kcf_tracker");
ImageConverter ic;
while(ros::ok())
{
ros::spinOnce();
geometry_msgs::Twist twist;
twist.linear.x = linear_speed;
twist.linear.y = 0;
twist.linear.z = 0;
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = rotation_speed;
ic.pub.publish(twist);
if (cvWaitKey(33) == 'q')
break;
}
return 0;
}
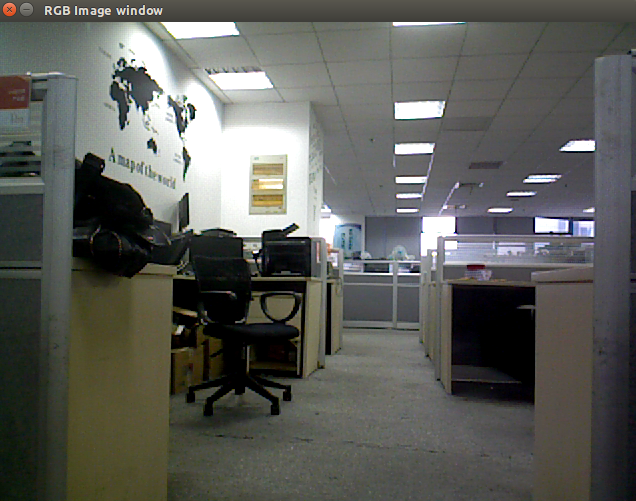
程式執行結果。