
提取影象的骨架(Skeleton)演算法
阿新 • • 發佈:2019-01-26
影象的骨架似乎沒有嚴格的數學定義,可認為是影象細化(Thinning)的產物(中軸可以看作一種骨架,其有嚴格的數學定義)。目前已經有許多細化演算法,這些演算法得到的骨架可能略有差異。本文實現了Khalid Sheed 的 K3M演算法。該演算法屬於迭代腐蝕邊界的一類演算法,該類演算法的思想是,假定從二值影象中物體的邊界處同時開始燃燒,物體就會被逐步細化,但在燃燒過程中要保證滿足一定條件的點被保留或者被“燒掉”,以確定燃燒結束後,剩下的最後一畫素寬的影象為影象的骨架。這些條件的確定沒有統一的標準,各個演算法採取了不同的方案。一般來講,為了滿足計算的速度要求和演算法的準確,迭代中演算法會對影象邊界上某點的3*3鄰域內進行檢查,判斷是否滿足要求。
K3M演算法在每次迭代中需要進行六次檢查
Phase 0. 標記出影象的邊界,
Phase 1. 如果該點的鄰域中有3個點(非零,以下皆如此)相鄰,刪除該點
Phase 2. 如果該點的鄰域中有3或4個點相鄰,刪除該點。
Phase 3. 如果該點的鄰域中有3,4,5個點相鄰,刪除該點。
Phase 4. 如果該點的鄰域中有3,4,5,6個點相鄰,刪除該點。
Phase 5. 如果該點的鄰域中有3,4,5,6,7個點相鄰,刪除該點。
Phase 6. 剩餘的邊界點取消標記,如果Phase 5中沒有點被修改,停止迭代,否則返回Phase 0。
具體的步驟可以閱讀論文:http://matwbn.icm.edu.pl/ksiazki/amc/amc20/amc2029.pdf
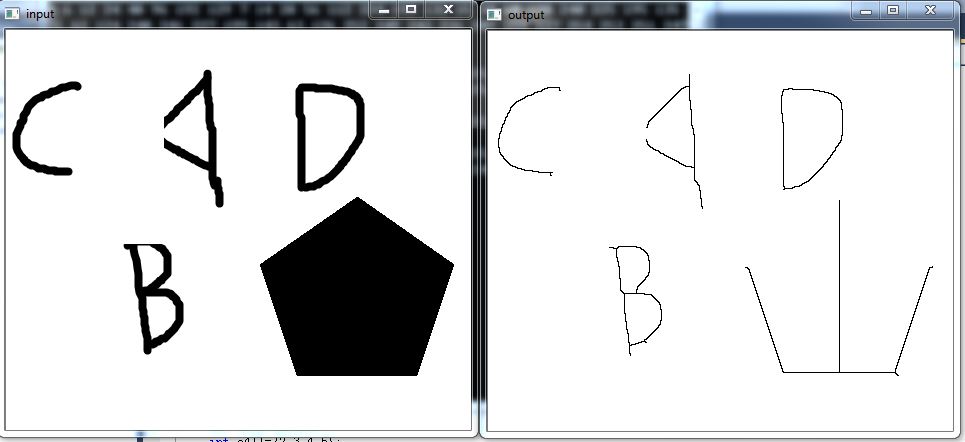
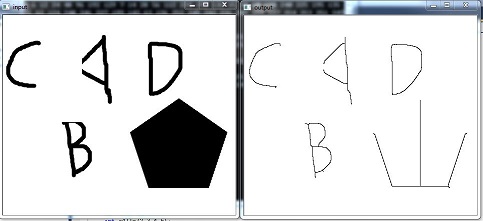
演算法的測試結果如下:
參考:
#include <opencv2/imgproc/imgproc.hpp> #include <opencv2/objdetect/objdetect.hpp> #include <opencv2/highgui/highgui.hpp> #include<vector> #include<iostream> #include<algorithm> using std::vector; vector<int> GetFlags(int a[],int length) { vector<int> vec; int neighbour[]={1,2,4,8,16,32,64,128,1,2,4,8,16,32,64}; for(int i=0;i<length;i++) { for(int j=0;j<8;j++) { int sum=0; for(int k=j;k<=j+a[i];k++) sum+=neighbour[k]; vec.push_back(sum); std::cout<<sum<<" "; } } std::cout<<std::endl; return vec; } void skeleton(cv::Mat &Input) //Input-binary image { int a0[]={1,2,3,4,5,6}; int a1[]={2}; int a2[]={2,3}; int a3[]={2,3,4}; int a4[]={2,3,4,5}; int a5[]={2,3,4,5,6}; vector<int> A0=GetFlags(a0,6); vector<int> A1=GetFlags(a1,1); vector<int> A2=GetFlags(a2,2); vector<int> A3=GetFlags(a3,3); vector<int> A4=GetFlags(a4,4); vector<int> A5=GetFlags(a5,5); vector<cv::Point2i> border; bool modify=true; int neighbour[3][3]={ {128,1,2}, {64,0,4}, {32,16,8} }; int row=Input.rows; int col=Input.cols; while(modify) { modify=false; // flag the border Pharse 0 for(int m=1;m<row-1;++m) { for(int n=1;n<col-1;++n) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>(m+j,n+k); } } if(std::find(A0.begin(),A0.end(),weight)!=A0.end()) border.push_back(cv::Point2i(m,n)); } } //Pharse 1 vector<cv::Point2i>::iterator first=border.begin(); while(first!=border.end()) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>((*first).x+j,(*first).y+k); } } if(std::find(A1.begin(),A1.end(),weight)!=A1.end()) { Input.at<uchar>((*first).x,(*first).y)=0; first=border.erase(first); } else ++first; } //Pharse2 first=border.begin(); while(first!=border.end()) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>((*first).x+j,(*first).y+k); } } if(std::find(A2.begin(),A2.end(),weight)!=A2.end()) { Input.at<uchar>((*first).x,(*first).y)=0; first=border.erase(first); } else ++first; } //Pharse3 first=border.begin(); while(first!=border.end()) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>((*first).x+j,(*first).y+k); } } if(std::find(A3.begin(),A3.end(),weight)!=A3.end()) { Input.at<uchar>((*first).x,(*first).y)=0; first=border.erase(first); } else ++first; } //Pharse4 first=border.begin(); while(first!=border.end()) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>((*first).x+j,(*first).y+k); } } if(std::find(A4.begin(),A4.end(),weight)!=A4.end()) { Input.at<uchar>((*first).x,(*first).y)=0; first=border.erase(first); } else ++first; } //Pharse5 first=border.begin(); while(first!=border.end()) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>((*first).x+j,(*first).y+k); } } if(std::find(A5.begin(),A5.end(),weight)!=A5.end()) { Input.at<uchar>((*first).x,(*first).y)=0; first=border.erase(first); modify=true; } else ++first; } //Pharse6 border.clear(); } for(int m=1;m<row-1;++m) { for(int n=1;n<col-1;++n) { int weight=0; for(int j=-1;j<=1;++j) { for(int k=-1;k<=1;k++) { weight+=neighbour[j+1][k+1]*Input.at<uchar>(m+j,n+k); } } if(std::find(A0.begin(),A0.end(),weight)!=A0.end()) Input.at<uchar>(m,n)=0;; } } } int main() { cv::Mat raw=cv::imread("test.bmp"); cv::Mat image(raw.rows,raw.cols,CV_8UC1); cv::cvtColor(raw,image,CV_RGB2GRAY); cv::Mat binaryImage(image.rows,image.cols,CV_8UC1); cv::threshold(image,binaryImage,150,1,CV_THRESH_BINARY_INV); cv::imshow("input",image); skeleton(binaryImage); for(int p=0;p<binaryImage.rows;p++) { for(int q=0;q<binaryImage.cols;q++) { if(binaryImage.at<uchar>(p,q)==1) binaryImage.at<uchar>(p,q)=0; else binaryImage.at<uchar>(p,q)=255; } } cv::imshow("output",binaryImage); cv::waitKey(0); return 0; }