
貝加萊CNC和機器人系統應用
阿新 • • 發佈:2019-01-28
快速發展的CNC和機器人市場
作為先進製造的基礎,高階的CNC和機器人技術代表著一個國家的基礎加工能力,國內一直致力於高階的CNC系統開發以及CAD、CAM等的集 成,從而實現計算機輔助設計到工藝生成與CNC執行的全流程,大大提升了產品的研發與生產效率。第三方諮詢機構IMS的報告顯示在汽車生產線、電子產品生
產、半導體、太陽能、金屬加工、包裝工廠對於機器人的需求正以30%以上的速度在增長。
需求的變化
今天,隨著IT技術、通訊技術和軟體技術的發展,CNC和機器人的應用也逐步在發生著變化,同樣,今天的客戶的需求也變得更加苛刻,他們有著更多的需求。
● 與AutoCAD、Pro-e、Solidworks等CAD軟體整合;
● 具有自定義的程式碼編輯能力;
● 與液壓、定位控制的配合動作;
● 與生產系統如PDM、ERP、MES的整合;
● 工藝庫的整合,專家系統、智慧補償演算法等設計。
通用運動控制-將邏輯、定位控制、CNC
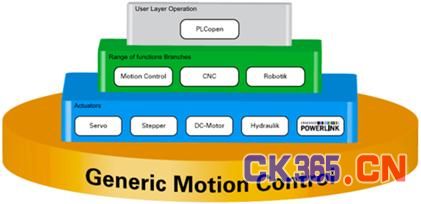
- 全關節型機器人
- Tripod
- SCARA
- 伽利略機器人
- …


