(2)PX4開發指南——飛航模式/操控
2.1飛航模式/操控
飛航模式定義了系統在任意時間的狀態。使用者可以通過遙控器的開關或者地面控制站切換飛航模式
飛航模式概述
1手動模式(MANUAL )
1.1固定翼飛機/多旋翼/船:飛行員的控制輸入直接傳給輸出混頻器。
1.2多旋翼:
(1)特技(ACRO):飛行員的輸入作為滾轉、俯仰和偏航的指令傳送給飛控,這允許多旋翼可以完全顛倒,油門被直接傳送到輸出混合器。
(2)(RATTITUDE):飛行員的輸入作為滾轉、俯仰和偏航的命令輸入到飛控。如果輸入不作為滾轉和俯仰角度的指令和偏航速率指令,油門直接輸入到輸出混頻器。
(3) (ANGLE):飛行員的輸入作為滾轉和俯仰角度指令和偏航率指令傳給飛控。油門直接輸出到混頻器
2輔助模式
2.1 高度控制
(1)固定翼飛機:當滾轉、俯仰和偏航輸入都在中間位置(小於一定的死區範圍),飛機會返回到直線和水平飛行姿態,並保持當前高度。它會由於風的作用發生漂移。
(2)多旋翼:當滾轉、俯仰和偏航輸入作為手動模式,油門輸入會以預定義的最大速率爬升或者下沉。油門有最大的死區。
2.2位置控制(POSCTL)
(1)固定翼飛機: 在空檔位置的輸入會給定水平飛行,如果需要保持直線,它會對風進行對抗。
(2)多旋翼:相對於地面,滾轉控制左右的速度,俯仰控制前後的速度。當滾轉和俯仰都在中心時(在死區內),多旋翼會保持原來的位置。偏航控制以手動模式控制偏航速率。在ALTCTLM模式,油門控制爬升或下降速率。
3.自動
3.1自動懸停(AUTO_LOITER)
(1)固定翼飛機:飛機懸停在當前位置的當前高度(或者可能在當前位置稍微上面的位置)
(2)多旋翼:多旋翼懸停在當位置和當前高度。
3.2自動返航(AUTO_RTL):
(1)固定翼飛機:飛機返回到家位置並在家的上空以圓形方式盤旋。
(2)多旋翼:多旋翼飛機以當前高度(如果高於家的位置+懸停的高度)或者以懸停高度(如果比當前高度高)直線返回,然後自動著陸。
3.3自動任務
所有的系統型別:飛行器執行從地面控制站(GCS)發出的程式任務。如果沒有收到任務,飛機會懸停在當前位置。
4 機外:
機外:在這個模式下,位置、速度或者姿態參考/目標/設定值是由一個通過序列線纜和MAVlink連線的伴隨計算機提供。機外設定值可以由APIs比如
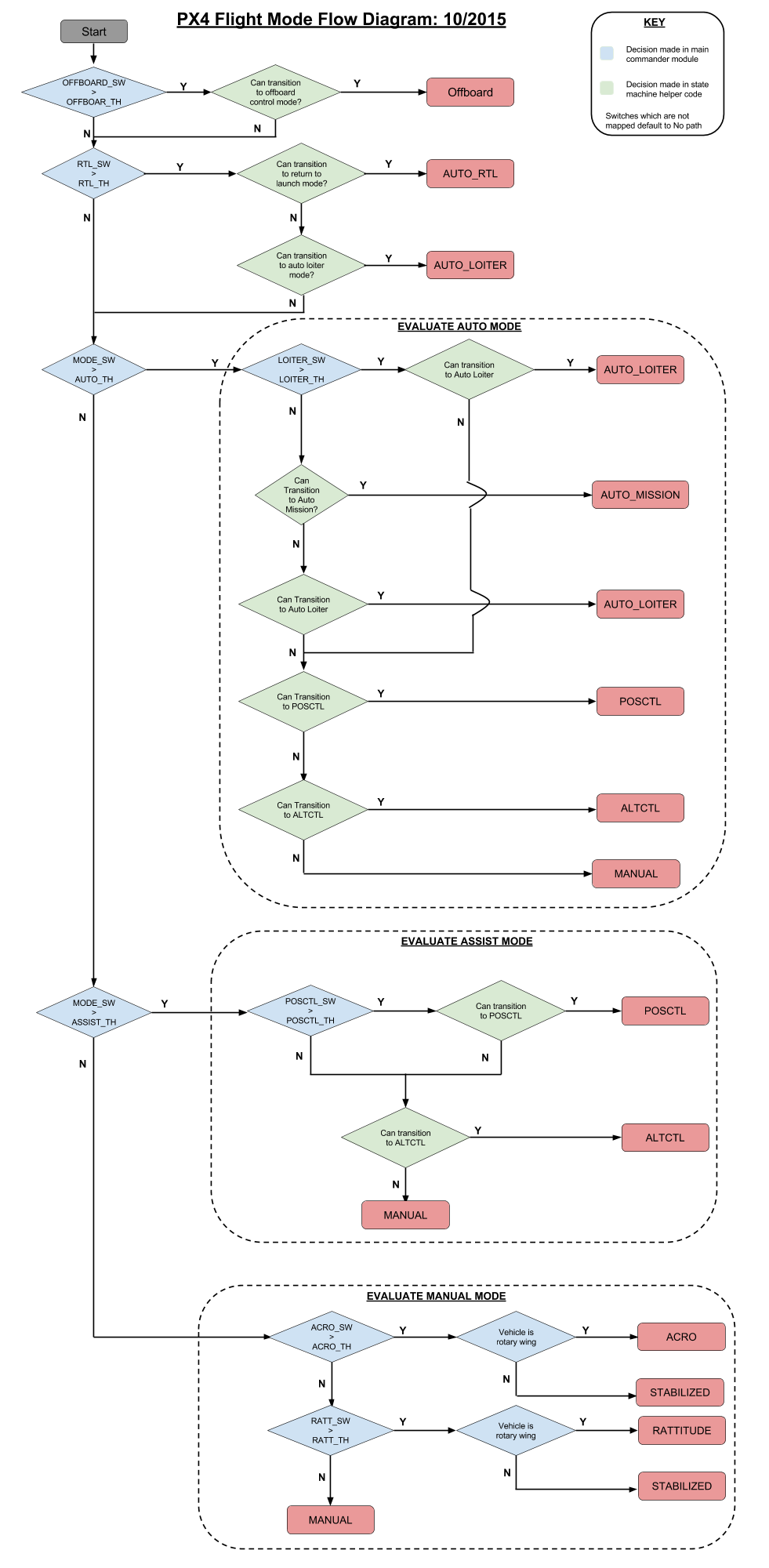
飛航模式調整圖