
IMU姿態融合(MPU9250從校正到濾波步驟)
聯絡方式:[email protected]
一、動機
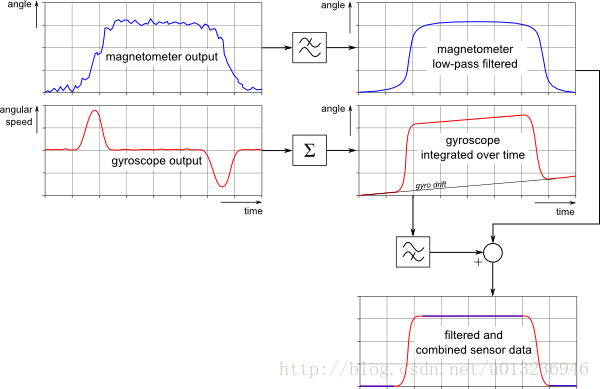
MPU9250包括三軸加速度計、三軸陀螺儀和三軸磁力計。因為加速度/磁力計具有高頻噪聲(需要低通濾波),將加速度/磁力計的訊號看成是音訊訊號,它們的訊號會有很多“毛刺“,也就是說它們的瞬時值不夠精確,解算出來的姿態會震盪,但長期來看姿態方向是對的。而陀螺儀具有低頻噪聲(需要高通濾波),即每個時刻的得到的角速度是比較精確的,使用積分就能得到旋轉角度(姿態),但是積分會累積誤差,因此積分到後面姿態就不對了,也就是漂移現象。 加速度/磁力計和陀螺儀在頻域上的特性互補,可以融合這三種感測器的資料,提高精度和系統的動態特性。
下圖表示的是把感測器翻轉90°一段時間後又翻轉回來時,加速度/磁力計、陀螺儀以及融合感測訊號,所求得的姿態資訊:
然而對於原始的MPU9250來說,在進行姿態融合前需要對感測器進行校正等“預處理”。
二、步驟
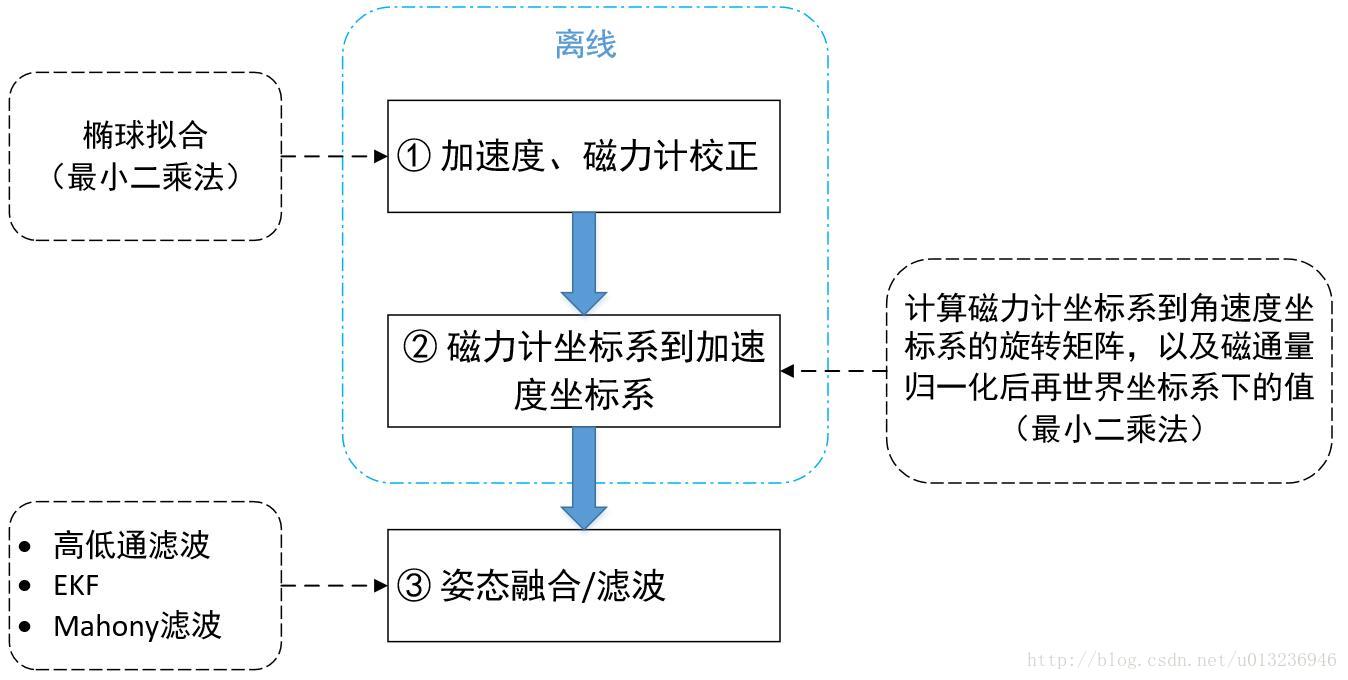
如上圖所示,要對MPU9250進行姿態融合/濾波,大體需要三個步驟:1、校正,2、座標轉換,3、濾波。其中前兩步需要離線執行。下面詳解這三個步驟。
1. 感測器校正
按正常的情況來說,加速度感測器在靜止狀態(即只受重力作用),重力在各個姿態下,在三維空間中,向量頂點會落在一個球面上。但在IMU中,x,y,z軸的度量單位很大可能不相同,假設各軸之間相互直,各姿態重力點會落在一個橢球面上,橢球的中心也不一定在原點,這其實就是加速度的偏移量。
在磁力計上,由於測量磁場強度,在環境不變的情況下,感測器每個姿態感受磁場強度是相同的,所以不需要靜止狀態,磁力計測量的x,y,z軸值,在沒有偏差且感測器內部x,y,z軸相互垂直的情況下,在三維空間中組成一個圓球面。但是磁力計存在Hard Iron Distortion和Soft Iron Distortion,使得x,y,z軸度量單位不相同,各軸也並非相互垂直,橢球球心也並非[0,0,0]座標。
總的來說加速度/磁力計校正,需要求出橢球的球心(偏移量)、橢球軸長(各軸單位長度;其實磁力計不需要求,後面會解釋。),即橢球擬合。
加速度計校正
- 在離線資料中尋找靜止狀態下的加速度感測器值,假設靜止時的不同姿態共有
n 個,則得到資料accData∈Rn×3 ; accData∈Rn×3 作為樣本資料,使用最小二乘法即可求出橢球方程的各個引數,接著根據我師兄部落格的方法可以求出橢球的球心(偏移量)和軸長。
磁力計校正
- 提取離線資料的磁力計感測器的值(不需要靜止狀態),得到樣本資料
magData∈Rm×3 , 假設有m組資料; magData∈Rm×3 作為樣本資料,使用最小二乘法即可求出橢球方程的各個引數,進一步求出球心(偏移量)和軸長(軸長可忽略)。
陀螺儀校正
陀螺儀不存在橢球的問題,因此可以直接從離線資料中找到靜止狀態下的資料,對資料求均值即可得到偏移量。
2. 磁力計座標系轉換到加速度座標系
磁力計的基座標系和加速度的基座標系(我們以加速度的基座標系作為世界座標系)並不一定是一樣的,比如加速度的基座標系x軸指向東,磁力計的指向北。因此,需要將磁力計座標系轉換到加速度計座標系,才能通過加速度/磁力計解算出正確的姿態。
假設加速度計測量到的重力加速度向量是
其次求出
橢球轉換正球和旋轉變換都已經包括在矩陣
磁通量在世界座標系下的x軸分量為0,重力加速度方向固定不變和z軸一致,通過向量點乘可以求出歸一化後磁通量在世界座標系下z軸的分量,再用模長公式求出y軸的分量。最後得到磁通量在世界座標系下的向量
3. 姿態融合
在使用各種濾波方法(如高低通濾波,EKF,Mahony)做姿態融合時,可以基於尤拉角、方向餘弦和四元數等方法。尤拉角在求解姿態時存在奇點(萬向節鎖),不能用於全姿態解算;方向餘弦可用於全姿態解算但計算量大,不能滿足實時性要求;四元數,計算量小,無奇點,滿足實時解算。
所以這裡使用的是基於四元數姿態融合,濾波方法包括高低通濾波、EKF、Mahony濾波。下面簡單介紹這三種演算法的大致思想:
高低通濾波
兩個方程說明問題
EKF
廣義卡爾曼濾波,主要有兩步:估算、校正。(公式和推導不詳述)。
- 估算:和高低通濾波一樣,使用陀螺儀估算出
t 時刻四元數; - 校正:計算出估算姿態下的重力加速度和磁通量向量,再用加速度/磁力計測量到的重力加速度和磁通量向量按照EKF校正方程進行校正。
Mahony濾波
主要是使用了PI控制器思想(未深入,理解有偏差歡迎指出)。同樣也分兩步:估算、校正。
- 估算:和前面一樣,使用陀螺儀估算出
t 時刻四元數; - 校正:計算出估算姿態下的重力加速度和磁通量向量,再用加速度/磁力計測量到的重力加速度和磁通量向量叉乘估算姿態的計算結果,得到的是估算姿態與測量姿態的誤差
e 。相關推薦
IMU姿態融合(MPU9250從校正到濾波步驟)
聯絡方式:[email protected] 一、動機 MPU9250包括三軸加速度計、三軸陀螺儀和三軸磁力計。因為加速度/磁力計具有高頻噪聲(需要低通濾波),將加速度/磁力計的訊號看成是音訊訊號,它們的訊號會有很多“毛刺“,也就是說它們的瞬時
談一談 MPU6050 姿態融合(轉)
nat 不同 四軸飛行器 物體 b- float 例子 只需要 原理 姿態角(Euler角)pitch yaw roll飛行器的姿態角並不是指哪個角度,是三個角度的統稱。它們是:俯仰、滾轉、偏航。你可以想象是飛機圍繞XYZ三個軸分別轉動形成的夾角。地面坐標系(earth-s
IMU姿態融合演算法
版權宣告:本文為博主原創文章,未經博主允許不得轉載。 博主:shenshikexmu 聯絡方式:[email protected] 高低通濾波,EKF,Mahony濾波 http://v.youku.com/v_show/id_XMjUxMDM5Mjk0MA=
使用 matlab 數字影象處理(九)—— 去卷積(deconvolution,逆濾波復原)
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
深度學習網路篇——ZFNet(Part1 從AlexNet到ZFNet)
一、上回說到的 AlexNet 請各位看官們參見部落格之前的文章: 深度學習網路篇——AlexNet https://blog.csdn.net/weixin_43624538/article/details/83988998 1)AlexNet效能舉世矚目 top-1和top-5
洛谷4219 BJOI2014大融合(LCT維護子樹資訊)
題目連結 QWQ 這個題目是LCT維護子樹資訊的經典應用 根據題目資訊來看,對於一個這條邊的兩個端點各自的 s i
在 2016 年學 JavaScript 是一種什麼樣的體驗?(React從入門到放棄)
作者:方應杭連結:https://zhuanlan.zhihu.com/p/22782487來源:知乎著作權歸作者所有。商業轉載請聯絡作者獲得授權,非商業轉載請註明出處。注:原文是英文,本文是我翻譯的。有人把我翻譯的內容原文照抄,放到他自己的專欄,搞得有人問我是不是我抄襲了……請支援我的勞動成果,花了兩個小時
SpringMvc 請求處理流程(如何從tomcat到SpringMvc)
HttpServletBean 在init方法中, 首先將Servlet配置的引數使用BeanWrapper設定到DispatcherServlet中, 然後呼叫initServletBean 子類通過這個方法進行初始化 FrameworkServle
Beam編程系列之Java SDK Quickstart(官網的推薦步驟)
rate start mark http 單獨 org 托管 pipe bucket 不多說,直接上幹貨! https://beam.apache.org/get-started/beam-overview/
linux系統--C語言程序開發的基本步驟(包含gcc的基本步驟)
什麽 linu 第一步 源文件 inux 文件 c語言 決定 擴展 1、使用vi或者vim編寫程序文件 2、使用gcc把所有的源文件翻譯成計算機認識的格式(編譯) 3、使用./a.out作為命令執行得到的可執行文件 gcc編譯器的工作步驟: 1、處理所有的預處理指令 2、把
機器學習-2(機器學習程式的步驟)
1 收集資料 這一塊你要的知識是如何獲得資料 如果不是自己的生產環境產生的真實資料,你還需要獲得爬蟲的技能,來從外部獲取資料到自己的分析庫。 2 準備輸入資料 這一塊可以理解為資料轉換,把資料格式轉
Python全棧工程師(42:Web框架Django步驟)
1.建立Django工程django-admin startproject 工程名2.建立appcd 工程名python manage.py startapp cmdb3.靜態檔案project.settings.pySTATICFILES_DIRS = (
MySQL(1)使用前的準備(安裝版的安裝步驟)
【安裝版MYSQL,和其他軟體一樣】 注意: 1】選擇安裝型別,有“Typical(預設)”、“Complete(完全)”、“Custom(使用者自定義)”三個選項,我們選擇“Custom”, 2】在“Developer Components(開發者部分)”上左鍵單擊,選擇
Docker應用部署實錄(包含完善Docker安裝步驟)
Docker應用部署實錄(包含完善Docker安裝步驟) 前言 首先說一下這篇文章的來源。我之前接手的一個IOT專案,需要安裝多箇中控伺服器。中控伺服器需要安裝RabbitMQ,Mysql,多個服務,這些部署,部署人員不怎麼會(畢竟是硬體兼職的),只能讓我給整一個簡單一些方案。我當時就想到了容器化部署,然後整
IMU校正以及姿態融合
版權宣告:本文為博主原創文章,未經博主允許不得轉載。 博主:shenshikexmu 聯絡方式:[email protected] 緣起 有緣在簡極科技兼職兩年。接觸了IMU,我去的時候那家公司還是一個要把IMU放進足球的公司,祝願簡極越來越好。IMU校正演算法大概
導向濾波小結:從導向濾波(guided filter)到快速導向濾波(fast guide filter)的原理,應用及opencv實現程式碼
1. 導向濾波簡介導向濾波是何凱明在學生時代提出的一個保邊濾波(edge-preserving smoothing)演算法。何凱明在cv圈應該算是名人了,學生時代關於影象去霧的研究就以第一作者的身份獲得Best Paper Award(CVPR 2009),而且今年剛剛又斬獲
git代碼倉庫遷移(從github到oschina)【轉】
mit tail name usr done git blank com detail 轉自:http://blog.csdn.net/a5244491/article/details/44807937 版權聲明:本文為博主原創文章,未經博主允許不得轉載。
MySQL基礎知識(MySQL從入門到精通觀後感)
alter mes times 值範圍 model 。。 字符編碼 不同的 精通 17/7/9 1.主從式架構(Client-server model)或客戶端-服務器(Client-Server)結構簡稱C/S結構,是一種網絡架構,通常在該網絡架構下軟件分為客戶端和服務器
600集Python從入門到精通教程(懂中文就能學會)
元組 單繼承 查詢 字符串 屬性 linux系統 事件 集成 tar 目錄大綱: 本套教程15天 1-3 天內容為Linux基礎命令 4-13 天內容為Python基礎教程 14-15 天內容為 飛機大戰項目演練 視頻概括: 第一階段(1-3天):
跟著我從零開始入門FPGA(一周入門XXOO系列)-1、Verilog語法
部分 同步 比較 跑馬燈 begin 寫代碼 人的 thread get (本連載共七部分,這是第一部分) 作者:McuPlayer2013 (EETOP FPGA版塊版主) 原帖地址:http://bbs.eetop.cn/thread-385362-1-1.htm