
遞迴牛頓尤拉(正)動力學模擬
遞迴牛頓-尤拉方法(Recursive Newton-Euler Method)是一種高效的動力學計算方法,尤其適用於串聯多剛體系統,例如串聯機械臂。遞迴牛頓-尤拉方法有正和逆兩種形式,本文我們先來看正動力學。正動力學又稱為前向動力學,如果給你機器人各關節的力矩後,通過正動力學可以求出機器人的運動。在這裡,機器人的運動指各個關節(或者各連桿)的位置、速度和加速度。
下面的演算法來自於論文《Lie Group Formulation of Articulated Rigid Body Dynamics》,我們更正了原文中的一處小錯誤。該演算法使用了李群和李代數表示機器人連桿的座標、速度和受力,其優點是形式簡潔、線速度和角速度可以合寫在一塊,力也是如此,並有清晰的數學含義。該演算法適用於三維空間,每一步正動力學計算過程包含三個遞迴子過程:1.
前向計算連桿的位姿和速度;2. 反向計算連桿系的廣義慣量和偏置力;3. 前向計算加速度。在定義連桿的記號時,通常將固定的基座記為 0,與基座
具體實現(Mathematica程式碼)
(*Initialization 部分引數初始化*) time = 2000; dt = 0.005; Table[mass[i] = 1; Gravity[i] = grav*mass[i]*{0, 0, -1, 0, 0, 0}, {i, 0, n, 1}]; Table[g[i, i + 1, 0] = RPToH[Id[3], {0, 0, (La[i] + La[i + 1])/2}], {i, 0, n - 1, 1}]; q = dq = ddq = ConstantArray[0, n]; Table[V[i] = dV[i] = ConstantArray[0, 6], {i, 0, n, 1}]; Table[M[i] = Id[6]; \[Tau][i] = 0, {i, n}]; F[n + 1] = ConstantArray[0, 6]; g[n, n + 1] = g[0, 0] = Id[4]; q = ConstantArray[Pi/2, n]; \[CapitalPi][n + 1] = Id[6]*0.0; \[Beta][n + 1] = ConstantArray[0, 6]; Table[ qList = {qList, q}; gList = {gList, g[0, 4]}; (*Forward 前向遞迴*) dq = dq + ddq*dt; (*尤拉積分*) q = q + dq*dt; For[i = 1, i <= n, i++, g[i - 1, i] = TwistExp[\[Xi]r[i], q[[i]]].g[i - 1, i, 0]; g[0, i] = g[0, i - 1].g[i - 1, i]; V[i] = Ad[Iv[g[i - 1, i]]].V[i - 1] + \[Xi]s[i]*dq[[i]]; \[Eta][i] = ad[V[i] - \[Xi]s[i]*dq[[i]]].\[Xi]s[i]*dq[[i]]; ]; (*Backward 反向遞迴*) For[i = n, i >= 1, i--, \[Tau][i] = 0; Mh[i] = M[i] + T[Ad[Iv[g[i, i + 1]]]].\[CapitalPi][i + 1].Ad[Iv[g[i, i + 1]]]; Fext[i] = T[Ad[RPToH[R[g[0, i]], {0, 0, 0}]]].Gravity[i]; \[ScriptCapitalB][i] = -T[ad[V[i]]].M[i].V[i] - Fext[i] + T[Ad[Iv[g[i, i + 1]]]].\[Beta][i + 1]; \[CapitalPsi][i] = 1/(\[Xi]s[i].Mh[i].\[Xi]s[i]); \[CapitalPi][i] = Mh[i] - \[CapitalPsi][i]*KroneckerProduct[Mh[i].\[Xi]s[i], \[Xi]s[i].Mh[i]]; \[Beta][i] = \[ScriptCapitalB][i] + Mh[i].(\[Eta][i] + \[Xi]s[i]*\[CapitalPsi][i]*(\[Tau][i] - \[Xi]s[i].(Mh[i].\[Eta][i] + \[ScriptCapitalB][i]))); ]; (*Forward 前向遞迴*) For[i = 1, i <= n, i++, ddq[[i]] = \[CapitalPsi][i]*(\[Tau][i] - \[Xi]s[i].Mh[i].(Ad[Iv[g[i - 1, i]]].dV[i - 1] + \[Eta][i]) - \[Xi]s[i].\[ScriptCapitalB][i]); dV[i] = Ad[Iv[g[i - 1, i]]].dV[i - 1] + \[Xi]s[i]*ddq[[i]] + \[Eta][i]]; , {t, time}];
模擬結果
我們首先以簡單的 4 個連桿組成的機械臂為例進行模擬試驗,連桿之間用轉動關節連線,機器人初始時刻處於水平的靜止狀態,所有關節的力矩設為0。理論上機器人應該在重力作用下自由下落,我們看看用正向動力學步驟計算得到的模擬結果是什麼樣的。結果如下動畫所示(只顯示了Y-Z平面)。從結果看好像是對的,但是我還不敢100%保證。
正確性驗證
為了驗證演算法的正確性,我和第三方的模擬軟體進行對比。這裡我選取了Working Model軟體(是一款商業的二維動力學模擬軟體)。在Working Model中設定相同的引數和初始狀態,模擬過程如下圖所示。
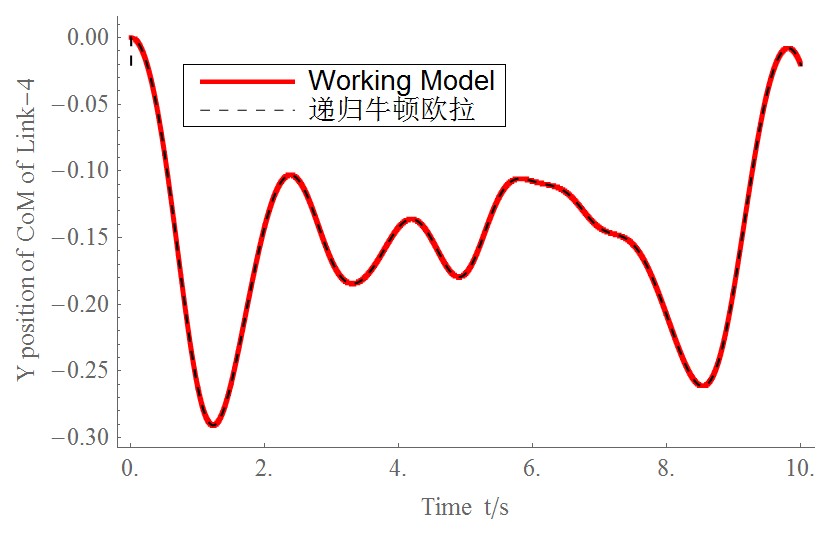
我們選擇末端連桿(也就是第4個連桿)質心的Y座標(重力加速度的反方向)進行對比,結果如下圖左所示。二者的誤差(下圖右)在-0.001m~0.001m之間。考慮到每個連桿的長度為10cm,誤差<1mm
說明我們演算法基本是正確的。因為都是數值計算,有誤差應該是正常的。至於為什麼誤差在0.5mm這個量級,這可能和我們採用的積分方法有關。在上面的演算法中,我們採用了最簡單的尤拉積分。而在Working Model中,因為這個軟體不是開源的,我們也看不到它的積分方法是怎樣實現的。不過我們倒是可以設定,在Edit選單下的Accuracy選項中即可選擇積分方法並設定積分步長。

下圖中的例子是10自由度的連桿同樣只在重力作用下(關節力矩為0)的運動,只是初始狀態不同,而且每相鄰的兩個關節旋轉軸相互垂直。有沒有聞到一絲混沌(Chaos)的味道
![]()
 這時要對比驗證可以藉助三維動力學模擬軟體,例如MSC Adams。但是太繁瑣,我懶得做了。機械臂是怎麼畫的呢?其它型別的關節怎麼定義呢?這些我會隨後在另外的部落格中給出來。
這時要對比驗證可以藉助三維動力學模擬軟體,例如MSC Adams。但是太繁瑣,我懶得做了。機械臂是怎麼畫的呢?其它型別的關節怎麼定義呢?這些我會隨後在另外的部落格中給出來。