
一步一步演示神經網路回饋演算法過程
宣告
最近在複習神經網路方面的知識。
在聽這節Andrew NG的機器學習公開課的時候,對於BP神經網路裡的錯誤反向傳播的一個公式(類似這樣的
為了方便分享這篇文章的實質內容,我並沒有逐字逐句地翻譯這篇文章,而是按照我覺得更易理解的方式進行的。同時,這裡面所包含的一些數學知識在這裡也沒有詳細解釋,需要大家自學。
背景
反向傳播(回饋,backpropagation)是一種訓練神經網路的常見方法。網上有大量的文章嘗試解釋反向傳播的工作原理,但卻很少有代入數值來說明的。這篇文章的作者就用了一個具體的例子來解釋反向傳播。
前言
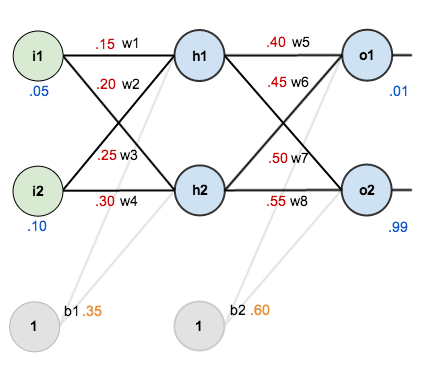
這個教程中,作者使用了結構如下的神經網路:

它包含有兩個輸入、兩個隱藏、兩個輸出結點。其中輸入層和隱藏層都包含一個偏置結點(b1, b2)。
初始化
初始化包括兩個方面,一個是給網路中的權重矩陣初始化賦值;另一方面給一組包含輸入輸出的訓練資料。如下圖:
反向傳播的目的
反向傳播的目的是為了優化網路中的權重,從而將任意的輸入對映到相應的輸出。
前向傳播
- 計算h1的輸入與權重矩陣的乘積
- 將步驟一的結果放入啟用函式(sigmoid函式)得到h1的輸出
- 重複上面的過程,我們得到h2的輸出(其輸入與權重矩陣乘積的值為:0.3925)
- 由h1、h2的輸出作為輸入,計算出o1、o2的輸出。如o1的計算過程如下:
同理得到o2(其輸入與權重矩陣乘積的值為:1.2249214039)






計算總體錯誤
作者使用了下面的公式(這個也是比較能用的公式)來計算總體錯誤:


同理:

總體錯誤為:

反向傳播
反向傳播的目的是為了更新權重引數,使得下次計算出來的結果更接近訓練樣本所提供的目標值。
更新w5、w6、w7、w8
下面以總體錯誤對w5的偏導為例。
計算偏導

通過下面這個圖來看上面的公式是怎麼來的:

1. 計算總體錯誤對o1輸出的偏導



2. 計算o1輸出對o1輸入的偏導


3. 計算o1輸入對權重w5的偏導


4. 得到總體錯誤對w5的偏導


擴充套件
作者在這裡提到了計算偏導的另外一種形式,就是Andrew NG在這節公開課裡用到的delta rule。其實是同一公式,只不過Andrew沒有在視訊裡推導公式,而是直接用了簡化的表示式,然後我就卡在這了。。。
更新權重w5
下面這個公式涉及學習率的概念(可以參考這裡)。

同理更新同一層的其它權重



注意,反向傳播的過程中,這些權重暫並不更新,整個反向傳播過程結束之後才對這個權重更新。
更新w1、w2、w3、w4
下面以w1為例。
注意,更新w1與更新w5有一些差別。

但是,

看下面的圖

也就是說,(推廣到其它多層網路)隨著反向傳播的推進,錯誤傳播的網路也在交織進行著。
下面看一下詳細過程:


其中


代入公式得:

同理可得:

所以,

現在計算

因為

同時


代入公式:

然後就可以更新w1

及w2、w3、w4。
總結一下
如果有一定的高數基礎,把上面的公式推導一下,就很容易理解了。有時間可以用python親自動手實現一下!