
python opencv-3.0 SIFT/SURF 特徵提取與匹配
阿新 • • 發佈:2019-02-06
一、環境準備
目前 Opencv 有2.x 和 3.x 版本,兩個版本之間的差異主要是一些功能函式被放置到了不同的功能模組,因此大多數情況兩個版本的程式碼並不能通用。建議安裝 Anaconda,自行下載相應版本。直接命令安裝:
conda install -c menpo opencv3
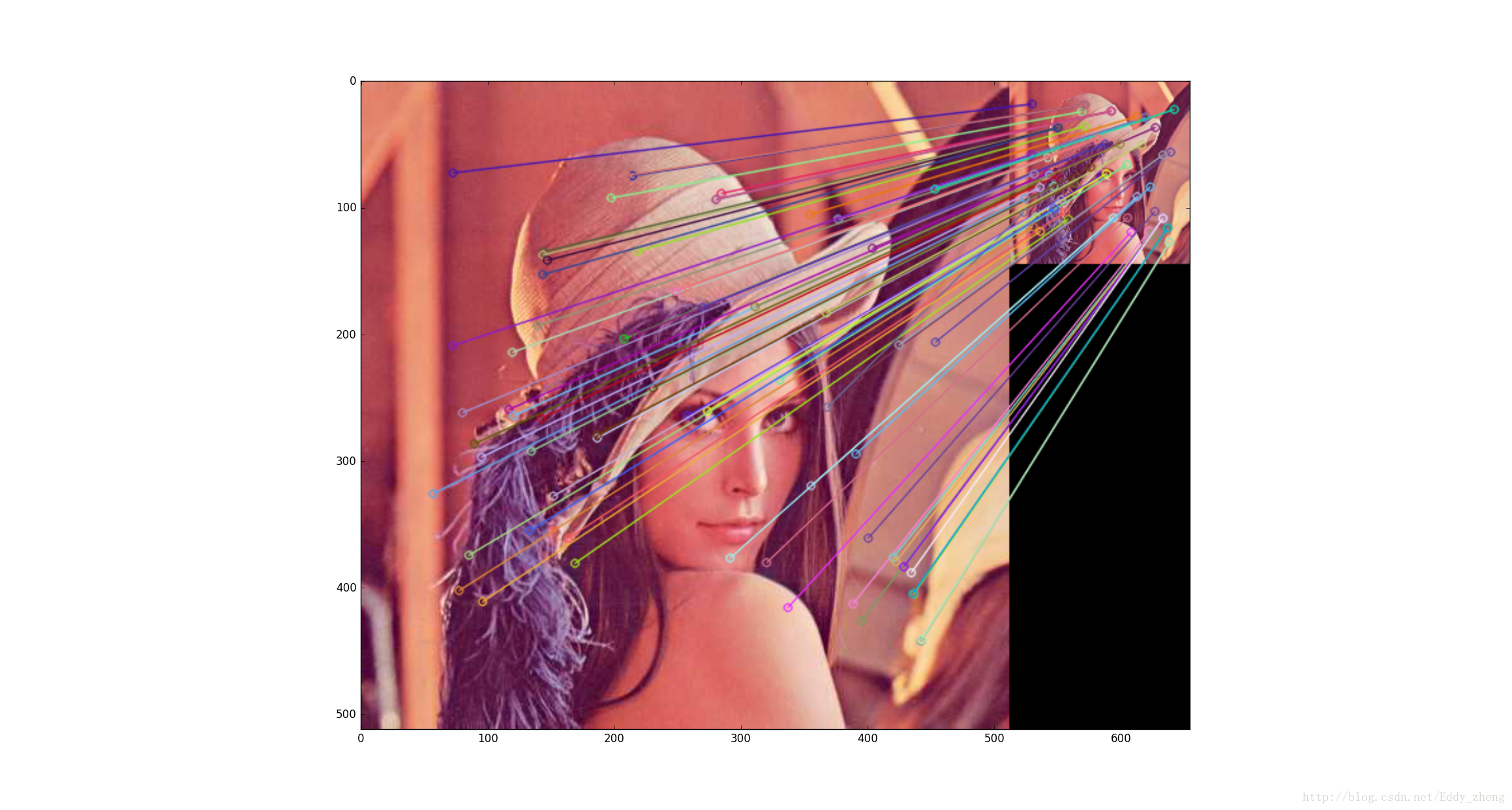
pip install imagedt二、SIFT/SURF 特徵提取與匹配
# coding: utf-8
from matplotlib import pyplot as plt
from imagedt.decorator import time_cost
import cv2
print 三、輸出展示
cv version: 3.1.0
surf detector......
==> time-cost: 0.187422 sift_detectOutput:
img1

img2
